Fórum témák
» Több friss téma |
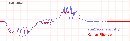
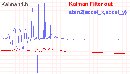
Kipróbáltam két megoldást. Csatoltam a kódokat és az ábrákat.
A Kalman2.h látszólag korrektül működik. A kimenete a valóságot (vagy ahhoz elég közeli értéket) mutatja. Viszont a vibráció is megjelenik a kimeneten - igaz jóval kevesebb amplitudóval. A Kalman1.h ugyan azokkal a bemenő értékekkel elég vad szögértékeket mutat. Ellenben a vibrációt (oldal irányú vagy körkörös, ahol nincs dőlés) teljesen kiszűri, a szögérték jelenik csak meg a kimeneten. Ráadásul "elmászik". Folyamatosan csökken vagy nő a kimenet nyugalmi helyzetben. Két 0 fok közeli nyugalmi helyzet sincs, szemben a Kalman2.h-val. Csatoltam a kódokat és az ábrákat. Mi lehet a gond?
És íme a két algoritmus:
Sziasztok!
Befejeztem az egyensúlyozó robotomat. Feltettem egy videót ide.  A PID-et nem hangoltam, bizonyára finomítható a szerkezet. A szervók lassúak ide, gondolom ezért nem tolerál nagyobb lökést.
A jobb stabilitas eleresehez az is segithet, ha megnoveled a robot tehetlensegi nyomatekat, azaz megnoveled a magassagat, es az elemeket a tetejere rakod (a robot sulypontjat a leheto legmagasabbra teszed). Ezaltal kissebb szogsebesseggel "dolne el", tehat tobb ido jut a beavatkozasra...
Nagyon jó lett, ügyes vagy. Lesz nagyobb is ?
Köszi a hasznos infót. Nem tudtam éppen akkor megoldani a magasítást. Így is megtartja magát. A motorok fordulatszáma sajnos kevés. Nem tudom lehet -e probléma az, hogy a motorok kb. 60-as PWM értéknél indulnak be? A maximum PWM érték +/- 255.
Sajnos a szerkezet hintázik kb. 5cm úton belül. Szerintem annak tudható be, hogy az alkalmazott Kálmán szűrő nem távolítja el teljesen az oldal irányú gyorsulást - ahogy fentebbi hozzászólásomban említettem. Elég finoman megfogni, és akkor nyugton marad. Ha felemelem a kerekeinél fogva, a kerekek elforgathatóak úgy, hogy az alap vízszintesen marad. Tehát ekkor nem hintázik. A hintázást akkor kezdi - lassan növekvő amplitudóval -, amikor egyensúlyi helyzetben leteszem. pittyu2 Köszi az elismerést. Nagyobb akkor lesz legfeljebb, ha valakinek kedve lesz megépíteni a mechanikát.
Lecseréltem a Kálmán szűrőt a nem optimalizáltra. Áll mint a cövek.
 Kár, hogy kevés az alkalmazott motorok fordulatszám tartaléka. Bár így is majdnem feláll felborult helyzetből ha egy kicsit segítek. Jó kis móka!
Nem akarsz irni egy rovid cikket a robotrol?
Engem nagyon erdekelne...
Természetesen megosztok mindent a robottal kapcsolatban. A cikk megírása szerintem nem kis munka, selejtet meg nem szeretnék írni. A héten kiderül.
Ha bármilyen kérdés felmerül addig is, segítek amiben tudok. Kapcsolási rajzom csak a motor vezérlőről van. Ritkán készítek elvi rajzot, általában egyből a NYÁK-ot kezdem el tervezni.
Mit lenne érdemes a cikkbe megírni - ha rövid?
Csatolom még ami lemaradt. Ráférne a forráskódra szépítés. Nem tudom hol rontottam el, de a hagyományos .h, .c kiterjesztés nem működött, ezért van az egész kód a -h állományban. Majd ha lesz időm rájövök arra is. Alapvetően a már említett gyorsulásmérő/gyro páros egyesítéséből kapjuk a dőlésszöget, ez megy a PID-re, mely 0-ra szabályozza a rendszert. A motorok -255 - +255 értéket kaphatnak a pwm_update(bal,jobb) függvényen keresztül. A motorokat jelenleg 8KHz-es PWM jel vezérli, így sípolnak. Lehet kísérletezni nagyobb frekvenciával is. Azt tapasztaltam, hogy nagyobb frekvencián nagyobb PWM értéknél kezdtek a motorok forogni. A PID értékei a PC soros portján keresztül módosíthatóak. Ezen kívül a PID mintavételezése és a PID setpoint is állítható.  Bármilyen elítélendő, én is így csinálom, mert gyorsabb...
Sziasztok.
A nehezén túl vagyok,(nem döl el) most már csak az "extrák" kiépítése van hátra, PL. akkufigyelés, fordulat/kmh kijelzés stb... Nem Kálmánszűrővel van megoldva. Egy XV3500 gyro, és egy MMA6270QT (accelero) van benne, és egy MSP430g2553 a mikrovezérlő. Íme a művem. Nem a legszebb, de nekem jó. Az MSP-s topikban már írtam róla, és sok segítséget kaptam ott, de úgygondolom inkább ide való.
Szia. Ez igen, minden elismerésem és tiszteletem. A második videón mintha le lett volna betonozva. Ha nem mozog a kisfiú- vagy nem lököd meg kézzel- azt hiszem állóképet látok.
Próbáltátok már "élőben emberrel "
Igen mentem vele, csak kicsi a hely a lakásban,(pláne most) és nem szeretném egyenlőre kivinni. Azért próbáltam a H-hídnál lévő ledeket is felvenni, hogy lehessen látni, hogy mozog az, csak nagyon aprókat. Meghát a motorok 24V-ak és csak 12V-al hajtom.
Én nem építek Segwayt, csak figyelemmel kísérem a történetet.Modell szinten sokat publikáltak már (nem a NASA szintre gondolok )de 1:1 léptékben nem igen látni ilyet.Remélem pár év múlva egy ilyennel fogok munkába menni.
Én most rendeltem egy IMU-t , ami accelerométer-gyro- magnetométer és barometrikus szenzort tartalmaz. Az én álmom egy jó Quadrokopter megépítése. További sikeres építést.
Nekem egy ilyen gép volt az álmom, természetesen úgy ahogy ez készült, hogy mindent Én csináljak rajta. (Mondjuk az ára is sokat számított, mert ez nekem kb 50ezerben van és ebből a két motor 36 volt. Az eredeti az 1,5 milla újonnan!)
Még régebben csináltam a báttyám RC heliébe magasságtartót, igaz azt PIC-el. Nem volt egyszerű. Sok sikert a Quadrokopter építéséhez és Boldog karácsonyt!
Az a magasságtartás (nemcsak ) engem nagyon érdekelne. Mivel lehet jó eredményt elérni ?
GPS -- bonyolult és nem túl pontos. Baro szenzor-- A légcsavarok olyan turbolenciát okoznak , hogy nem pontos. Ultrahang --jó lenne de a dőléskor már magasság változást érzékel. ?? Boldog karácsonyt és eredményes újévet kívánok.
Gratulálok! Szép munka!
Kellemes ünnepeket kívánok mindenkinek!
Pedig Baro szenzor + 3 axis accelero (a Z a fontos) párossal lett megoldva. Ne gondolj valami NASA szintű dologra. Annyit tud, hogyha egy bizonyos magasságban bekapcsolod, akkor azt a magasságot tartja és csak jobbra-balra tudod a helit irányítani. Ha komolyabban érdekel a téma: Google -> RC heli auto pilot. Rengeteg példa van a neten. Azért nem folytam bele a témába komolyabban, mert RC-s körökben fillérekért lehet ilyesmit beszerezni. pl HobbyK.
Üdv!
Szitko által megalkotott jármű akkora hatással volt rám, hogy elhatároztam, megalkotom. Mivel nem vagyok anyagilag eleresztve, így kerestem a legolcsóbb beszerzsi forrásokat. Ennek kapcsán akadtam bele az Analog Devices termkeibe. Valamint az STMICROELECTRONIK honlap is meglepett. Mindkettő helyen rendelhető minta, de analog-nál gyro jelenleg nincs minta gyanánt. Viszont az ST.com-on van mindkettő. Bízom benne elősegíti ezeknek az eszközök otthoni kipróbálását a közreadott informácó. Sok sikert mindenkinek!
Vedd figyelembe, a gyronál: frissítési freki, a skála faktor (mV/deg/s). Ezek alapján Én ezt a gyrot választanám. A programban egyszerűbb a számolás. A gyorsulásmérőből 2 axis elég. Bár abból csak egyet láttam. Igazából 1 axis-os is elég lenne, csak akkor a kanyarodást potival kell megoldani.
Pár napja hosszas kutakodás után találtam egy teljesen magyar nyelvű leírást a topikban tárgyaltakkal kapcsolatban. Aki elolvasná:Link
Kár hogy nem magyar!
Ügyes!
Ez külön tetszik a kapcsolási rajzon: "I_HOPE_THIS_IS_THE_ANGLE"
Ezt még nem olvastam, de szép kis olvasmány. Amit Én csináltam, abban nincs Kálmán szűrő, mert túl komplikáltnak találtam. Én az alapokat innen vettem, de a szűrőt az alkatrészekhez kell igazítani, ami nem egyszerű játék.
Ja magyarul nemsokmindent fogsz találni a témáról.
Egyensúlyozó robotot szeretnék építeni. Gyro nélkül csak gyorsulásmérővel is meg lehet oldani?
Meg tudod oldani, csak macerásabb.
Ha a forgásponton van egy gyorsulásmérő, és attól a lehető legtávolabbi ponton is, akkor a kettőt egymásból kivonva kapod az elfordulást.(azaz a szöggyorsulást) De macerás, mert a távolabbi pontban ébredő gyorsulás két összetevőből áll, az előre haladó robotod gyorsulása + a szöggyorsulás, előbbi ráadásul a haladási sebesség függvényében változó vetületben jelentkezik, hisz nagyobb sebességnél jobban előre kell dönteni a robotodat.(ez igaz a forgáspontban lévőre is) Ha nem nem szögelfordulást mérsz, hanem szöggyorsulást akkor az időtag miatt minden hiba négyzetesen jelenik meg, amikor visszaszámolod szögre..(milyen hiba?, pl.: a centrifugális erő is hat, remeg a robotod, döccen egyet, nem pontos a szenzor, ill. csak adott mértékig) Bár ha tudsz végtelenül sűrűn mérni, akkor menni fog gond nélkül. Azaz integrálnod kell a gyorsulásodat, (kétszer). Ha van gyorsulásmérőd ami analóg jelet ad ki akkor használhatsz integráló tagot, és akkor nem kell számolni, az megcsinálja "helyetted"... (itt látod: http://www.kando-kkt.sulinet.hu/brain/aut/jegyzet/irtech/szabalyozas.html az integráló tagot keressed az oldalon, középtájt van.) Itt olvashatod érthetően a miértjét: http://vip.tilb.sze.hu/~wersenyi/HA.pdf a 6. oldalon(/-tól) Ez nem a teljes válasz, pár dologra azért még oda kell figyelni. Sosem építettem ilyet, csak belegondoltam, uh ha nincs igazam tessék kiabálni. |
Bejelentkezés
Hirdetés |