Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
Egy kicsit halvány fogalmad sincs a léptetö motorokrol, ha ilyen adatokat keresel. - motoroknál az áram van megadva és a polusszám (hány lépés egy fordulat). Ilyen egyszerü a válasz.
Hát telibe találtad "édes öregem", "ha szabad ezzel az ásatag kifejezéssel élnem"
 Valóban nincs. Viszont semmilyen adatot nem találtam erről a motorról, ami alapján el tudnék indulni, gondoltam hátha van tapasztaltabb akár a keresés terén is, ill. biztosan van tapasztaltabb, aki segíthet.
Az a sanda gyanúm, hogy ez DC motor (különösen, ha csak két vezetéke van
). Ezek általában 24V-osak kb. 3000 fordulattal.
Az utolsó hozzászólásod eltünt, legalábbis nálam.
Abban is igazad van, alapvető fogalmakkal sem voltam-vagyok tisztában ezek szerint. Nem akartalak megbántani. Csak a motor tulajdonságaira lettem volna kíváncsi, úgylátszik rossz topikban tettem fel a kérdést. Köszönöm a segítséget.
Az ilyen motorokat általában a gyártó megrendelésre gyártja valamilyen cég. A megrendelő által kért jelzéssel. Ez a cég gyártmányai között nem szerepel, adatlapja nincs. Utánrendelni is csak az eszköz (HP) gyártójától lehet. Ha ismerjük az áramkört, ami vezérli, a feszültség és a bekötés alapján lehet valamit kideríteni. Ebből a szempontból a két kivezetéses kefés DC motorok a legegyszerűbbek.
Igen, jól tájékozódtál. Ha az unipoláris motor középső kivezetését nem használod, akkor a bipolárisként használható. Azt azért érdemes figyelembe venni, hogy ugyanakkora forgatónyomaték eléréséhez kétszer akkora feszültség kell, viszont fele akkora áram. Ha meg tudod bontani a tekercs kivezetéseket, hogy mind a négy tekercs végéhez hozzáférj (összesen 8 drótvég), akkor az unipoláris tekercsek párhuzamosan köthetők, de oda kell nagyon figyelni, hogy mit kötsz össze mivel (ha nem jól kötöd, a kettő tekercs pont kioltja egymást).
Helo. Nem vagyok túl szakmabeli, szóval lehet amatőr kérdés lesz.
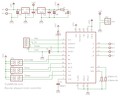
TB6560AHQ "Reset" bekötése a google-n talált kapcsolási rajzok alapján is teljesen homályos. Valaki el tudná magyarázni? Illetve nyomtatóportos vezérlés esetén (Mach3) mikor van reset jelem és melyik pin-ről? A második homályos folt a motor kimenetek. Ha minden igaz akkor az ahq-ban már eleve megvannak a védődiódák, ebben az esetben nekem már semmi dolgom vele? Gondolom nem meglepő hobby cnc-hez lesz. Tudom lehet a végén többe fáj mintha megvenném a kész motorvezérlő kártyákat, de épp ettől lesz "hobby" hogy ezzel is én szenvedek A hozzászólás módosítva: Aug 28, 2016
Az enable lábat egyszerűen fix potenciálra kötöd , az adatlap megmondja hogy + vagy gnd . Elég a step dir lábakat rákötnöd a vezérlőre
Hello
Valaki tudna segíteni nekem? A 3d nyomtatóm Z tengelyének léptető motorja olyat művel ha egy közepes sebességgel megy akkor semmi gond tökéletesen működik, de ha csökkentem a sebességét vagy növelem akkor elkezd zúgni és meg se mozdul még akkor se ha nincs a motoron terhelés. Ha ilyenkor zúgás közben elkezdem tekerni a motort kézzel akkor elindul és megy de nincs nyomatéka és legközelebb megint nem tud elindulni. Amit eddig megnéztem: motort(nema17) és a motorvezérlőt(A4988) cseréltem de semmi, az arduino programját is cseréltem hátha rosszul vezérli a motorvezérlőt de semmi. Oszcilloszkóppal mértem a motor jelét jó és rossz állapotban(nagyon könnyen előidézhető a hiba) impulzus szélesség ugyan annyi 1.1ms a feszültség ugyan annyi 12v. Viszont annyit észrevettem hogy amikor csak zúg akkor a négyszögjel nem szabályos Mikor jó Mikor rossz De a táp feszt megkapja rendesen. Szóval nem tudom mi lehet a gond, nagyon örülnék valami ötletnek mit próbáljak meg. Előre is köszönöm.
A mach3 nál akkor szokott ilyent csinálni a motor ha a motortaning nagyon fel van tolva, nagyon gyors a jel és nem bírja követni a motor.
Próbáld meg felcserélni az egyik tekercs kivezetéseit
kaqkk
Felcseréltem de sajnos csak a forgásirány változott de a hiba maradt. Melphi Melyik jelre gondolsz amit a motorvezérlő kap vagy amit a motorvezérlő ad ki a motornak? Mert a motorvezérlőn(A4988) nem lehet semmit sem állítani csak a lépés osztását (full, 1/2 1/4 1/8 1/16) és a motor áramkorlátját, de az elvileg jó mert áttettem egy másik motorét amivel nincs gond de semmi változás. A motorvezérlő adatlapjából kiolvastam hogy a bemenőjelnek minimum 1us hosszúnak és a szünetnek is min 1us hosszúnak kell lenni ami nálam 4us a jel és 13us a szünet. Jaj azt elfelejtettem hogy ha úgy állítom be hogy nagyon lassan gyorsuljon akkor először zúg aztán a hogy elvileg nő a sebesség a vezérlés szerint akkor elindul és a végén mikor megint lelassul akkor megint csak búg. A hozzászólás módosítva: Szept 18, 2016
A "hibás" meghajtóra próbáltál másik motort kötni ? Ha másik motorral is fent áll a hiba akkor a vezérlő rossz ha úgy jól működik akkor a motor hibás
Hát ez az hogy rátettem másik motort és azzal is rossz, rátettem másik motorvezérlőt és azzal is rossz, az Arduino+ramps1.4 adna ki rossz jelet a motorvezérlőnek? De nem láttam különbséget a jelben, de azt még megnézem még egyszer. Az Arduinon már próbáltam firmwaret cserélni 2 félét is, de ugyan az.
A motorvezérlő milyen lépésszámra van állítva ? Próbáld fullon-vagy 1/2 -n
Akkor már csak az arduino lehet a hibás ...
Üdv. Marlin-t használsz? Nekem is volt hasonló jelenség a Z tengelyen, hogy csak zúgtak a motorok. Mondjuk nálam csak akkor, ha mindkét Z motor rá volt kötve, magukban nem csinálták. A Marlin firmware Configuration.h állományában javítottam a következő sort:
Eredeti: #define DEFAULT_MAX_FEEDRATE {300, 300, 5, 25} // (mm/sec) Javított: #define DEFAULT_MAX_FEEDRATE {300, 300, 1, 25} // (mm/sec) Lassabb lett, de megbízhatóbb. Nem tudom a te problémádhoz mennyi köze van.
Most mértem az aduino által ki adott jelet újra de semmi különbséget nem látok a jó és a rossz állapot között.
Tesóm ért az arduino programozásához majd mondom neki hogy próbálja meg hosszabbra állítani a kiadott jelet vagy esetleg a frekvenciát levenni hátha az a gond.
Vettem egy unipoláris 5V-os léptetőmotort,aminek 5 vezetéke van.Egy 5V-os elemekből álló tápról akartam beindítani,de meg sem mozdult.A forgórészt kézzel sem tudom megmozdítani,lehet rossz a motor?
Ha feszültségmentes állapotban sem tudod megforgatni a léptetőmotort (és nincs rajta áttétel), akkor hibás.
Basszus
 Egyébként a motor 28BYJ-48-as és a tengelye nem középpontos,akkor lehet van rajta áttétel,és azért nem tudom megforgatni? Egyébként a motor 28BYJ-48-as és a tengelye nem középpontos,akkor lehet van rajta áttétel,és azért nem tudom megforgatni? A hozzászólás módosítva: Szept 25, 2016
Igen az áttételes. Sima 5V-ról nem fog megmozdulni, egymás után sorba kell a tekercsekre adni a feszültséget és akkor fog folyamatosan forogni, szép lassan. De ezt mikrovezérlővel egyszerűbb megoldani mint kézzel.
Gondoltam 5V-ról kipróbálom a működését,és nem kell nekem a teljes forgás,csak 90 fokban kell mozognia,ez lesz a távirányítós autóm első kerekeinek vezérlése
Nem az 5V-tal van a baj, mert arról megy rendesen, de ez nem egy DC motor. Olvass utána a léptetőmotor működéséről. Itt van egy jó oldal egy elég beszédes ábrával.
Tehát csak simán rákötöttél 5 V-ot? Azt hittem, rendes vezérlést készítettél neki.
Csak ki akartam próbálni,de azt nem tudtam,hogy meg sem fog mozdulni.Majd PIC-el próbálkozok.
A hozzászólás módosítva: Szept 26, 2016
Sziasztok!
Lenne egy olyan problémám,hogy egy merevlemezből kiszedett léptetőmotort szeretnék használni,de fogalmam sincs hogyan bírhatnám működésre,mivel a felépítésével sem vagyok nagyon tisztában(ugyanis eddig csak bipoláris léptetőt használtam) és gondoltam ti tudtok segíteni. A motor 3 kivezetéssel rendelkezik és mindhárom kivezetés között akármilyen sorrendben mérem az ellenállás ugyanakkora. A kérdésem az lenne,hogy milyen felépítésű lehet ez a motor és,hogy milyen eljárással tudnám meghajtani(rendeltetés szerűen). Van egy L298-as IC-m,így lehetőleg azzal szeretném valahogy meghajtani. A válaszokat előre is köszönöm. A hozzászólás módosítva: Szept 26, 2016
|
Bejelentkezés
Hirdetés |