Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
Esetleg javulhat-e a hatásfok azzal, hogy csökkentett feszültséget használok (mondjuk fele annyit) a hőterhelés csökkentése végett, de az ellentétes tekercseket ellentétes fázissal hajtom meg?
Mit számít a hatásfok? egy léptető motor nem erőgép. Csak ne melegedjen, mert akkor tönkremegy. Akkor aztán oda a hatásfok.
Azért van erős motor is, mert a munkahelyemen több száz kilós terheket cipelő tengelyeket hajtanak. Igaz lassító áttételen keresztül.
Sziasztok!
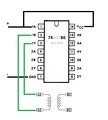
Van két db 4 vezetékes bipoláris léptetőmotorom és a párhuzamos portról szeretném őket irányítani egy fapados rajzgéphez. A portot már kezelem. villognak a ledek, egy unipoláris motort már hajtanék is. De a bipoláris logikánál és az ic-knél megrekedtem. Találtam egy egyszerű kapcsolást (nem vezérlő azt még nem akarok) de nem tudom megvalósítani mert nem ismerem a jelöléseket. Én annó azt tanultam, hogy + és - feszültség van. itt meg mindenféle gnd, vcc, com... Persze már napok óta bogarászok a fórumok közt de mindig megakaszt a szakzsargon. Ezért lerajzoltam az ic-ket, hogy teljesen egyértelmű és könnyű legyen a dolog. El is kezdtem összekötözgetni de szerintem nagy ökörségek is vannak benne. Ezért azt szeretném kérni, hogy valaki akinek már megy , rajzolja be nekem pár vonallal, hogy mit kössek mivel. Az eredeti rajzhoz képest betettem egy optocsatolót is mert ma már elfüstöltem egy tranzisztort és ezért nem bízok csak az opto leválasztásban de persze a tranzisztor kell a végére mert az opto 0,05 A-re kicsit kevés a motoromnak. (A rajz fájl mellékletben csatolva. Remélem elérhető lesz itt valahol) Köszönettel, E
Szia!
Általánosságban: A Vcc a "pozitív tápfeszültséget", a GND a földelést ("negatív ágát" a tápnak) jelöli. (Persze, vannak finomítások, de az alapszabályok a jelölési rendszerben ezek.)
Aludtam rá egyet, meg két fontos ic lábbal már összebarátkoztam Frankye segítségével, úgyhogy csinálok egy opto nélküli rajzot mert azt később is beletehetem, illetve egy stabilabb összevonalazgatást mert tudok én ennél többet is csak hát hajnal 3-kor nincs formában az ember.. Úgy már segíteni is könnyebb lesz mert ez így lehet, hogy kicsit sok.
Hello!
- Külön inverterre nincs szükség, mert marad három XOR kapud. Ha az XOR egyik bemenetét A Vcc-re kötöd, akkor a másik bemenete és kimenete között már invertál is. - Ha az LPT portra kötöd az optót, akkor csak kettő kell belőle. Mert ha a meghajtó és az XOR közé, akkor a PC oldal felől tápfesz is kell, ami ott nincs. Viszont az ULN meghajtó oldalon meg mindenféle képen kell táp a tranyók kinyitásához. üdv! A hozzászólás módosítva: Júl 3, 2013
Köszönöm Peter65!
Feljegyzem a javaslatod, de a nagy árkülönbség és a nem túl erős motorok miatt, az ULN2003-asnál maradok. Viszont nem nem értem: az L293D adatlapján, a három darab motor jelölést. Az nem 3 db tekercs akar lenni? Mert nem mindegy, hogy egy ic-vel 1 db motort lehet meghajtani vagy 3-at? Üdv, E
Szia proli007!
Köszönöm a válaszodat! Amit leírtál azt így értelmeztem (kép). De AZT HISZEM nem így fogom megcsinálni mert meg szeretném hagyni a további motorok csatlakoztatási lehetőségét is, ami az eredeti kapcsolás szerint gazdaságosabbnak tűnik. Viszont örülnék, hogyha visszajeleznél, hogy jól fogtam e az adást mert szívesen kipróbálnám ezt a verziót is. Üdv, E Kerüljük az MSN, fészbúk és egyéb net-szlenget! Frankye A hozzászólás módosítva: Júl 5, 2013
Ja! és még annyi, hogy: ugye akkor jól látom, hogy így tekercsenként 1 ic kellenék?
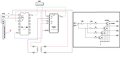
Szóval akkor az eredeti felvetésem módosítása: Még nincs benne optocsatoló amivel mindenképp le szeretném választani, még nincs benne tranzisztor ami persze fog kelleni.
Ez az 1. lépés, hogy a kép jobb oldalában lévő kapcsolást megvalósítsam, 4 vezetékes,bipoláris léptetőmotorok vezérlésére a pc-ről. A vonalazgatások szerintem jók. a xor ic gnd lábánál veszítettem el leginkább a fonalat. És persze így már a másik gnd is elbizonytalanodott. És ugye akkor mi legyen a párhuzamos port-ról érkező negatív feszültséggel? A válaszokat előre is köszönöm. E
Hello!
- Én csak arra tettem javaslatot, hogy az XOR kapuval ki lehet váltani az invertereket. - Péter,meg azt próbálja mondani, hogy bipoláris motorhoz nem jó az ULN mert az H-hídáramkörrel kell vezérelni. - Minden GND pontot össze kell kötni. De az LPT-ről is ott GND jön ami egyébként az USB negatív feszültségével azonos pont. (Vcc="+" GND="-") üdv! A hozzászólás módosítva: Júl 4, 2013
Sziasztok!
Olyan váltóra lenne szükségem amit rá tudok szerelni a léptetőmotorra, és ha a léptetőmotor egyet fordul, akkor a váltó kimeneti tengelye 5-öt. (1/5:1) Netem találtam párat pl.: http://www.robotshop.com/geared-bipolar-stepper-motor-3v-233-oz-in.html De az összes gearbox amit találtam, csak lassítja a tengelyt. Létezik olyan is ami gyorsítja? Köszi
Szia
Ha megfordítod akkor gyorsító áttétel lesz. (kivétel a csiga hajtás mert az önzáró ) Lásd Az igaz hogy ezek nagyok, de a kissebekre is érvényes. És láthatod, az egyik oszlopba a lassítás, másik oszlopba a gyorsítás van. üdv. A hozzászólás módosítva: Júl 5, 2013
Mire kell ez? Mekkora fordulatszámra? Biztos, hogy a léptetőmotor a jó megoldás rá?
Miért nem tudod egyszerűen nagyobb frekivel hajtani? Lesz elég nyomatéka a motornak az áttétellel meghajtani az akármit?
Sziasztok!
Kedves Tomika, a te problémád sokkal egyszerübben is megoldható, olyan léptetőmotorra van szükséged amelynek 5x kisebb a felbontása, vagyis lépésenként 5x nagyobb a tengely szögelfordulása...  A másik lehetséges megoldás - növelni a motor tápfeszültségét és 5x gyorsabban léptetni...
Köszi a válaszokat!
Nem gyorsaság miatt kell a fordulatszám növekedés, hanem hely takarékosság miatt. Kisebb fogaskereket tudnék így használni.
A léptetőmotor max 0-300 fok között fog mozogni.
Az a problémám, hogy a léptőmotor tengelyén van egy abszolut encoder, aminek a pozícióját tudnom kell és ez után kellene nekem az 5x meghajtás.
Ha már ott az enkoder, akkor nem is szükséges feltétlenül léptetőmotor...
Az esetedet úgy is fel lehet dolgozni hogy van egy villanymotoros hajtómű ami végezi a feladatot, melynek tengelyére csatolunk reduktoron keresztül enkodert... Mivelhogy a reduktornak csak az enkodert kell "vinni", sokkal egyszerübb - kisebb reduktor is megfelel... De még mindig nem írtad konkrétan miröl van szó...
Az ST adatlapján a 10. és 11. ábrát kellene nézned.
Ez az IC nem csak léptetőmotorokhoz jó, hanem DC motorokhoz, abból akár többet is meghajthat. Bipoláris léptetőmotorból azonban csak egyet, mert mind a két tekercset teljes híddal kell vezérelned. Ezt az uln2003-mal nem tudod megoldani, open-kollektoros darlingtonokat tartalmaz. Van L293 és L293D, az utóbbiban benne vannak a kimeneti védődiódák, szerintem ezt kéne választanod. A HE Store-s ár valóban magas, a Lomex-nál kb. fele ennyi. Tudtommal ez a legolcsóbb teljes hidas meghajtó, de lehet hogy más tud jobbat javasolni.
Szia Proli007!
Köszönöm a rajzot! Nagyon felvillanyozott, hogy ebből már lesz valami, el is tekertem zuhogó esőben a boltba... de sajnos ez nem volt elég mert 7486-ból csak a (drágább) "LS" volt és itthon az adatlapjáról nekem úgy jött le, hogy nem kapcsolhatok minden lábra 5V-ot. De a másik kettő: "HC Quad Exclusive Or Gate" és a "HTC" adatlapjáról se tudom egyértelműen kibogarászni, hogy mehet-e az 5V mindenhova. Így arra gondoltam, hogy a rajzod csak a logikára vonatkozhat és a feszültségeket közben nekem kell szabályoznom a lábak közt. (A feleslegessé vált 74LS86-ot szívesen neked ajándékozom ha tudsz vele kezdeni valamit) (Tudom, hogy kicsit demagóg vagyok de sajnos a kéziféket nem az elektronikai érzékem húzza be, hanem olyan mellékes tényezők, hogy minden angolul van sokszor más-más protokoll szerint, és rutinos felhasználóknak akik az üres rubrika helyére is odalátják az adatot.) Üdv, E
Hello! Csak kapkodom a fejem, hogy miket írsz. Egy logikai IC családnak meg van a működési tápfeszültség tartománya. (L-H vagy tiltott sávja.)
A TTL IC-nek 5V a (Vcc) tápfeszültsége, az akár LS akár nem. Az LS családnak kisebb az önfogyasztása, és nagyobb a sebessége. De léptető motornál ez számodra baromira mindegy, a motor az IC-hez képest csiga. A HC és HCT CMOS verziók. Ezek fogyasztása még kisebb. A "H" a gyorsabb működést jelenti, a "C" a CMOS felépítést, a "T" a bementi jelszintek TTL kompatibilitását. De táp ugyan úgy lehet 5V. Vagy is bármelyik bemenetre kapcsolhatsz 0..5V feszültséget ha a táp 5V. De "működni", vagy is a bementi jelet logikai jelet, magas vagy alacsony szintnek venni, a bementi feszültség tartományon belül fogja. Ez lehet eltérő, de az adatlapján előfordul hogy egyedileg nem található meg, csak a család leírásban. Ezek az áramköröket vegyesen alkalmazva, nem mindig jó. Vagy is adott, hogy pld. egy LS kimenetre hány LS bemenet kapcsolható. A TTL-nek nagyobb a fogyasztása, így kimeneti árama is nagyobb. De pld. egy LS kimenete meg tud haltani egy TTL bementet. Vagy egy HC egy LS-t. De ezt mindig át kell gondolni (nézni az adatlapot) hogy a logikai bementi szintek sávja hogyan értelmezett, és azt hogyan teljesíti egy kimenet. De ha azonos családból azonos családra viszel jelet ki-bemenetek között, ott gond nem lehet. (Pont ez a lényege a digitális IC-k jelszintjének és kimeneti terhelhetőségének szabványosításának.) Jelszinteken gondolkodni akkor kell, amikor nem egy logikai áramkörrel hajtasz meg egy bementet, (pld. optocsatoló esetén), vagy kimenetet nem logikai bemenetre viszed, hanem mondjuk az ULN-re. Ekkor figyelni kell a terhelést, hogy ne rontsa el a logikai feszültségszintet, de legfőképpen ha az a kimenet nem csak a terhelés meghajtására megy, hanem más logikai bemenetre. üdv!
Sziasztok. Viszonylag új vagyok ebben a témában, nem csináltam még ilyet.
Egy olyan mechanizmust szeretnék csinálni, melyben gombnyomásra a léptetőmotor egy előre beállított lépésszámot megtesz, majd leáll. Ezt maximum másodpercenként kétszer. Ezt a lépésszámot szeretném változtathatóvá tenni. Van erre valakinek valami kapcsolása? (Egy tekercselőhöz szeretném, a huzal vezetésére, ahol a cséve tengelye minden egyes fordulatnál kapcsol egyet, és ekkor a huzal vastagságával megegyező távolságot tesz meg a huzalvezető egy golyósorsón. A tekercselő megvan, csak a kézi vezetést szeretném felváltani.) Előre is köszönöm.
Ez amit leírtál nem teljesen jó : A szálvezetőnek szinkronban kell forogni a tekercselő tengellyel , ezért szokták változtatható áttételű dörzskerékkel megoldani a kettő közt a kapcsolatot .
Kézi vezetésnél is huzaltól függően, akár 10 menetig nem is mozdítom a kezem, viszi magát a huzal előre egymás mellé a csévén, utána tolom arrébb kicsit a kezem. Szóval szerintem ez nem lenne akadály, ha 1 menet távolság le van maradva.
A hozzászólás módosítva: Júl 7, 2013
Ha sikerül megoldanod a szál vezetését és aránylag messze van csévetesttöl még 0,08mm-s huzalt is simán menet menet mellé teker. Én két nemez között (székláb/parkettvédök)feszitem a huzalt ( vastagabbat min 0,5 még nem tekertem). A feszitö kb. 15cm-re van a csévetesttöl. A másik, hogy a csévetest lassan induljon. Minap találtam egy külföldi lapot, ahol ugyanilyen feszitöt még két csörlö követ amit egy M6-s menetes tengellyel és egy léptetömotorral mozgatnak 2 állitható ütközö között.
A tekercselést, egy sima ablakemelő motorral, és fordulatszám szabályzó áramkörrel oldottam meg. Maximum 2 menet/mp re képes. Változtatható iránnyal. Kézi tekerésnél még ujjal meg tudom feszíteni a huzalt. Két filcréteg közé préseléssel képzeltem el az előfeszítést. Privátban eltudnád küldeni azt a weblapot?
Már csak ezt a huzalvezetést kellene megoldani. |
Bejelentkezés
Hirdetés |