Fórum témák
» Több friss téma |
Üdv!
HDD motort szeretnék beindítani a saját elektronikájával, de akadtak problémák. Van négy darab régi winchester, ami atx tápról működik, abból három 1 perc múlva lekapcsol, mert nincs alaplapra dugva. Egy pedig szándékos zárlatot csinál és leállítja a tápot, szintén az alaplap hiánya miatt. Stabkockákról működtetve ugyan ez van. Meglehet kerülni ezt a kikapcsolást valahogyan? Így olcsóbban kijönnék, ha nem készítenék hozzá motorvezérlőt.
Szia, ezt a negyszogjelet hol erted el? Amugy ez a kapcsolas mintha nem foglalkozna a BEMF-el. Igy a vezetekeket tul futheted a joval nagyobb aramfelvetel mellett -- en nem javasolnam max 1-2 kiserlete, hogy jeee megy a motor...
Persze, meg lehet csinalni, nem is bonyas, az IDE csatlakozon kell foldre huzni 1-2 vezeteket, most fejbol nem tudom, de majd otthonrol megnezem -- en csinaltam ilyet, de ha jol emlekszem SCSI-val, mert volt egy 10krpm-es HD amivel jatszadoztam, meregettem scope-pal stb ahhoz kellett.
Szia!
A fetek-en nem biztos, hogy a négyszögjel pont így jelenik meg, azért is írtam, hogy a fetek bekötésében nem vagyok biztos, tranzisztorral meg nem próbáltam még. Amúgy a három bistabil kimenetén a négyszögjel pont úgy jelenik meg, ahogy a másik ábrán van. Az első bistabilnál lehet, hogy a tranzisztor bezavar egy kicsit, később pont e miatt hagytam el, és használtam az invertált kimenetet, és úgy is jó volt. Ja, és a motor úgy három kivezetéses, hogy a három tekercsvég, plusz a csillagpont, szóval így négy. Ha jól értelmezem a BEMF az a jel, amit egy hall ic generál, és gondolom a jel alapján szabályozza a vezérlő a tekercs áramfelvételét. Szerintem ha kellően nagy frekvenciát használok, és megfelelően beállítom a feszültséget, akkor nem ég le. Az oldalon több olyan kapcsolás is van, amelyik nem vesz figyelembe semmi ilyet, csak a meghajtást.
Szia,
Nem talalom azt amibol anno kineztem, de azt hiszem ez is jo lesz: Bővebben: Link Szoval az 1-es, 21-es es 29-es Vcc-re menjen, a 2, 19, 22, 23, 24, 25, 26, 30, 33, 35, 36, 37, 38, 40 foldre. Remelem sikerul, de csak sajat felelossegedre!
Szia,
Most akkor nem ertem milyen jelrol beszelsz. A HDD motoroknal tipikusan nincs hal elem, azt ki szokas hagyni mert csak noveli a gyartasi pontatlansagot. a BEMF azaz Back EMF, azaz Back Electro Motive Force az az eppen nem gerjesztett tekercsen generalodo aram aminek meresevel lehet a hal elemek nelkul is pontosan tudni epp hol all a motor. De ez csak egy bizonyos fordulatszam felett lehetseges, ezert szokas a CD-ROM motoroknal a hal elem hasznalata -- azonban a HD motorok csak es kizarolag egy fordulaton porognek es a sebesseg viszonylag magas ezert hagyjak el... A hal elemmel rendelkezo motorok vezerleset szenzoros motor vezerlesnek (Sersored Motor Control), mig a hal elem nelkulieket szenzor nelkuli motor vezerlesnek (Sensorless Motor Control) hivjak -- ha a google-on akarsz keresgelni. A meghajtas energiaja nagyon is lenyeges. Gondolj bele mi tortenik: Raadsz A-B pontokra aramot, a tekercs elkezdi vonzzani a magnest, majd a motor emiatt mozogni kezdd. Egyre gyorsulo mozgassal megkozeliti a tekercset, majd a tehetetlensege miatt elhalad mellette. Ekkor at kell helyezni a forgatas energiajat a kovetkezo tekercsre, hogy az kedje el huzni a magnest -- tulajdonkepp a magneses teret forgatod. Ha ez nem a megfelelo idoben tortenik meg akkor a motor lassulni kezd mivel az elozo tekercs fekezi az egyre tavolodo magnes miatt a motor mozgasat. Majd valtas utan ismet gyorsulni kezd majd megint lassulni. Legroszabb esetben lehet is latni, hogy szaggatottan jar a motor. Ez a kosoi valtas, de van korai valtas is. Ekkor a valtas tul hamar tortenik meg, a motor nem kepes kovetni a magneses ter valtasat ezert azt mondjak le-szinkronizalodik (elvesziti a szinkront). Ekkor mindenfele akadasokat lehet tapasztalni mivel ujra es ujra a sebesseg kulonbsegek miatt a magnes a jo helyen fog behuzni es akkor egy-egy pillanatra a motor gyorsul majd megint leporog ahogy a szinkront ismet elvesziti. Namost, igazandibol ketfajta vezerles letezik. Az egyik mikor a bemeno feszultseget ill aramot vezerled es a tekercsek valtasa masodlagos szempont, az csak szolgai modon hajtodik vegre hogy a motorba vezetett energia a forgatast szolgalja es ne a fekezest. Pl modellezesnel hasznalnak ilyen szabalyozokat, mert a fordulatszam masodlagos, az a lenyeg, hogy a motor sebessege a megadott feszultseg tartomanyban vezerelheto maradjon. Mas alkalmazasnal is hasznalhatjak ezt ahol az aramfelvetelt akarjak valamilyen modon korlatozni es ahol a sebesseg masodlagos pl egy elektronos ablak vagy ventillator lehet ilyen pl. Masik megoldas, hogy a fordulatszam a lenyeges, es a feszultseget annak megfeleloen szabalyozzak, hogy az adott fordulatszam meglegyen. Pl a HD-nal is ez a lenyeg, de a legtobb ipari alkalmazasnal is ezt hasznaljak (robotok, eszterga pad vagy mit tudom en nyomtato). Ez utobbi modszer is tulajdonkepp aramvezerelt, csak a kivant sebesseget figyelembe veve valtoztatjak a rakapcsolt energiat. Emellett termeszetesen egy PID vezerles is szukseges, hogy a terhelesi viszonyok megvaltozasahoz megfeleloen tudjon reagalni. Mindkettonel azonban a lenyeg, hogy: 1. Megfelelo idoben tortenjen a valtas 2. Illetoleg a bevitt energia se tul kicsi se tul nagy ne legyen. Ami kapcsolast kerdeztel az ezt nem latszik ezeket figyelembe venni ezert en nem javasolnam.
Ok, köszi.
Nem számít ha baj lesz belőle, ezek kidobásra ítélt 400-500 MB-os vinyók. Ha elszállna, akkor is van még 3 ilyen 
Mesterek!
Az az én igazi problémám,hogy sehol nem találok 3 tekercses léptető motorhoz step/dir vezérlést.6 vezeték ,mérések szerint 3 külön tekercs.kéne 1 odavissza számláló hozzá,vagy valami ötlet.nem szívesen hajítanám el ezt a 3 1forma mocit.2Nm nyomaték5v tartó 12v léptet   
Szétszedtem egy meghibásodott winchestert. Meghagytam benne a merevlemezt amit agymotor hajt. A vezérlőelektronikát leszereltem és a motor helyénél van 4 db kivezetés sorban. Szeretném a motort bepörgetni úgy, hogy a vezérlőelektronikát kihagyjuk belőle. Az áramforrás egy adapter 2 kivezetéssel(+)(-). A 4 db kivezetések körül nincs semmilyen jelzés.
A viccelőket megelőzvén nem kérek az ujjal való bepörgetésről tippeket, meg a madzagos rátekerős módszerből sem kérek(bár ez még csak most jutott eszembe .
Mi viszont kérjük, sőt nyomatékosan javasoljuk, hogy a felesleges témanyitás helyett próbáljon meg az illető először keresni. Válasz is hamarabb lesz (vagy már van is) egy létező témában, és figyelmeztetés sem jár érte...
Egyszerűbb nincs? Valami nagyon egyszerű áramkörre gondoltam.
Idézet: „Egyszerűbb nincs? Valami nagyon egyszerű áramkörre gondoltam.” Mar rengetegszer irtam (csak ugy tunik senki sem olvassa), hogy a BLDC vezerles nem egyszeru dolog! Ha egyszeru kell akkor egy szenkefes motort kell beszerezni es azzal mar sima DC rakapcsolasaval porogni fog a motor. Ha szenkefe nelkuli motorokat szeretnenk vezerelni akkor ahhoz sokminden kell -- nem csupan az elektromos teret kell forgatni, de szenzorok jeleit figyelve, avagy szenzor nelkul motor eseteben a BEMF-et merve szabalyozni is kell az elektromos teret. Ez sajnos nem a kezdo mikrokontrolleresek kategoriajaba tartozik.
Sziasztok!
Olyan kérdésem lenne, hogy az UDN2950Z bipoláris fél-hidas motor meghajtóval meg tudom-e hajtani a winyómotort? (van belőle 3db)kicsit értelmetlen, de mellékelem a doksit Előre is köszi!
Szerintem meg, de ahány tekercs kivezetése van, annyi ilyen meghajtó kell. Plusz még valami vezérlés is kelleni fog. Sőt az se baj ha viszacsatolás is van, tehát fontos az is hogy hol áll épp az állórészhez képest a forgórész. Mondjuk ha csak a pörgetés a cél, akkor ha szép lassan elkezded növelni a fordulatszámot, akkor az is jó lehet.
Igen, tudom, írtam is, hogy van 3db-om. Vezérlés is lesz előtte, csak arra voltam kíváncsi, hogy meghajtónak jók lesznek-e ezek? Tehát igen
köszönömAmúgy egy 4 kivezetéses (3 tekercs + csillagpont) motort termeltem ki, és szeretnék egyenlőre csak pörgetni, aztán lehet belőle akár mi is...
Most nézem jobban, ott a 6. oldalon ami neked kell. Igaz az szenzoros. Honnan szerváltál ilyen meghajtót amúgy ?
Ezeket egy régi kazettás meghajtóból termeltem ki. A belevaló kazetta nem sokkal kisebb, mint egy 3,5" winyó és azt hiszem 60MB a tárkapacitása. Ebből az UDN-ből volt 3db, LM317-ből volt 2db
volt még benne egy motor aminek volt vagy 10-12 kivezetése, azzal nem tudtam mit kezdeni(egyenlőre)Köszönöm a választ, amúgy én az 555+4017-re gondoltam, egyszerű is no meg már építettem egy hasonlót, csak azt léptetőmotorhoz.
Sziasztok!
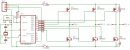
Épp egy HDD motorját próbálom felpörgetni, kezdem is elveszteni a hitemet, hogy sikerül, ezekkel a gondokkal fogrdulok hozzátok, mert én egyszerüen már nem tudom, hogy miért nem sikerül! A mellékelt rajz a 3-dik rajz, amit én készítettem, egy HDD motor leírását képező PDF-ből! Az egyik problémám az, hogy egyszerűen a PIC-en olyan késleltetéseket írtam, amivel folyamatosan, a portra adatokat írtam ki, megfelelő sebességgel! Ekkor a motor erősen remegett! Volt pár olyan pillanat, mikor tényleg forgott, de az ritka, és szerencsés pillanat volt! Ezt természetesen egy nagyjából lemerültnek mondható 12V-os akkumulátor üzemeltette, ami nagy hülyeség, mert a tekercsek ellenállása 3Ohm, ami jelenleg nem gond, hisz az akksi le van merülve! Mégsem tudom, hogy a FET tranzisztorok GND oldala, azaz a P csatornás oldala kegyetlenül melegszik, és a motor ugyanúgy remeg  A motorról annyit tudok, hogy 3 tekercses, közös testtel! Ezt, ahogy már kitaláltam, egy osztott Kondis megoldással feszültségosztást csináltam... Az lenne a kérdésem, hogy mi lehet a hiba, vagy mit rontottam el. És a másik kérdésem az, hogy milyen feszültséggel kell egy ilyen motort meghajtani?! Köszi Üdv.
Persze, hogy remeg, mert nem rendesen hajtod meg, hanem gondolom mindig open looposan. A gond ezekkel az, hogy a tekercsekre adod az energiat, az elkezd gyorsulni, majd mikor elerte a poziciojat akkor nincs meg a megfelelo idoben a forgaster valtasa, ezert a motor lassulni kezd es kozben rettento nagy aramfelvetel keletkezik. Legrosszabb esetben van ez a rangas effektus -- bar lehet ez a jobbik mert igy legalabb eszre vetted valami nem stimmel...
Nos, epp emiatt kell closed looposan meghajtani, ami annyit tesz, hogy merni kell a motor poziciojat, es a megfelelo idopillanatban valtani a gerjesztett tekercseken ill azok polarizaciojan. Ezt egy ilyen szenzor nelkuli motor eseteben az un BEMF segitsegevel lehet elerni, azaz az eppen gerjesztetlen tekercsen indukalodo aram meresevel. Gyakorlatilag ott +- feszultseg indukalodik, es epp a 0 atmenetnel kell valtani (ill. motortol fuggoen fazis eltolassal ehhez a 0-hoz kepest). Hogy milyen arammal kell meghajtani -- nos az mondhatjuk automatan jon, ugyanis a vezerlo aramkor egy adott forgasi sebessegnek megfelelo energiat kell biztositson a motor szamara. Magyaran pl egy 5000 rpm-es sebesseg tarasanal folyamatosan mered a BEMF segitsegevel a motor forgasi sebesseget, mert az amugy is kell a closed loop vezerles miatt. Ha a sebesseg no, akkor a tekercsekre adott energiat csokkenteni kell. Ha lassul, akkor pedig novelni kell. Tipikusan ezt egy PID vezerlessel lehet megoldani, hogy az esetlegesen valtozo terhelestol fuggoen a forgasi sebesseget tartani lehessen egy tureshataron belul. Szerintem olvasd vegig az AN857-et + keresgelj tovabbi informaciokat az alapjan.
Nem egészen értem ezt a rajzot. A felső oldali P fetek szerintem folyamatosan nyitva vannak, mert még lemerült 12V -os akkunál is van mondjuk 10V tápfesz. A PIC pedig nem tud 5V -nál nagyobb feszültséget kiadni a portlábon. Még akkor se ha HiZ -be van kapcsolva. Mivel a védődiódákon át így a 10V felől tud folyni az áram az 5V felé. Tehát a felső P feten legalább 5V GS feszültség van, amitől az ki fog nyitni valamennyire. De ha rosszul gondolom, akkor valaki cáfoljon meg, nem akarok félrevezetni senkit.
lidi ->
Érdekes módon, a P oldali Fet-ek méréseim alapján, mikor a PIC PortB-re 0 értéket adok, NINCSENEK nyitva!! Ezt abból is láttam, mivel az akksira egy ilyen billenős feszmérő van ráragasztva, és folyamatosan mutatja az akksi értékét! Trundai -> Az AN857 alapján készítettem ezt a rajzot, kifelejtettem egy két részt belőle, hisz gondoltam, így is működni fog Ellenben sajnos nem tudok Angolul, úgyhogy, amit kimazsoláztam belőle, az a bekötési rajz, és maga az alap működési elv! MicroPascal-al tudok jelenleg programozni, általában sikerül belebonyolódni az ASM kódba... És a kérdésem itt az lenne, hogy a Senzor lábak hova kerülnek?! Vagy hogy kell azt bekötni, mert a rajzon ugyan kijönnek, de ott el is vesznek Köszi
Sorry! Tévedtem! a PortB-re leadtam egy értéket, mely 1 volt, és így a PORTB0 Lett H szinten! Épp elfüstölt a mosfet :no:
A mai nap végigbújtam a szavakat, amiket leírtál, igaz ilyen Webfordításos módszerrel ugyan, de annyira nem értem, hogy is lenne ez
 A motor egy átlagos 4 kimenetelű közös testtel rendelkezik, ami szerintem Csillag kapcsolásban van! Foggalmam sincs, hogy a Senzor lábakat hova kell rakni, vagy hogy lehet használni! Ebben a Topic-ban az elején volt szó egy Senzor nélkülire is, kiváncsi lennék, hogy az hogy is működik... Sajnos, nincs egy normális kicsi kapcsolás, amin tényleg el lehetne indulni! És szerintem egy 16F877-es IC-t "elpazarolni" egy motor meghajtására  Vagy csak én vagyok költségkímélős... Én Pic16F84-el próbálkoztam!
Most nem ertem, szernzoros motorod van? A szenzoros az HAL elemekkel van felszerelve (3 fazisu ugye 3 HAL elemmel), es azokat honyebb meghajtani, azonban a motort dragabb gyartani.
A HDD-ben sensor-less (szenzor nelkuli) motorok vannak tipikusan, mig CD-ROM-okban es DVD-kben szenzorosak (ha akarsz azokkal is jatszani). A szenzor nelkuliekben a motor poziciot ahogy mar emlitettem a BEMF meresevel vegzed el. Ha megnezed az eredeti kapcsolast, akkor lathatod, hogy az "A" vezetek egy ellenallas oszton keresztul a C6-os vonallal jelzett vezeteken keresztul az RA3-ra megy, ott fogja ADC-vel a BEMF mereseket elmegezni. Ha mar kapcsolasi rajznal tartunk, lathatod, hogy a FET-ek nem kozvetlenul vannak a PIC-re kotve, hanem CMOS meghajton keresztul. Tehat Lidi felvetesen gondolkozz el es probaldd meg szerintem azt kovetni amit a rajzon talalsz -- hacsak nem vagy benne abszolut biztos mi az amit csinalsz Idézet: „A mai nap végigbújtam a szavakat, amiket leírtál, igaz ilyen Webfordításos módszerrel ugyan, de annyira nem értem, hogy is lenne ez” Hat bevallom webforditos modszerrel nekem sem menne Probald meg kiszotarazni es megerteni. [OFF] Idézet: „Sorry! Tévedtem! a PortB-re leadtam egy értéket, mely 1 volt, és így a PORTB0 Lett H szinten! Épp elfüstölt a mosfet” Nyilvan ha angolul kersz elnezest akkor nem is kell neked az a webfordito 
trudnai! Király vagy!
 Most már értem, hogy ezt a felső R19..R21 és C6 kondi erre a BEMF mérésre való! Arra gondoltam, hogy ha Senzoros a motorom, amit most már kétlek plusz 3db vezeték jön ki, külön a Senzorokra! Most nekem jelenleg utánna kell nézni az ADC-nek, mert még nem használtam a PIC-en belül... És az ANGOL szöveget a webfordítás tényleg rosszul csinálja, de emellett tudok pár szót  Pl Sorry Pl Sorry  A kérdésem még az lenne, hogy körübellül milyen jelet kell érzékelni a C6-os vonalon, ami visszamegy a PIC-hez?! Ilyen váltakozó feszültséget? Köszi mindent!
Olvasd mar el azt a doksit! :nezze: (es probaldd is meg megerteni mi micsoda)
Ott vannak a BEMF jelei, hogy tipikusan hogy nez ki. Figure 8 mutatja pl a tipikus trapezoid jelet, Figure 9 mikor 50%-os duty cycle-lel hajtod meg. De ezek csak elmeletben neznek ki ilyen szepen, ugyhogy lathatod a valosagosat is a Figure 11-en... Ezt a sok tusket fogja neked megszurni a C6-R20 (sot R19) alkotta RC szuro... Itt vannak a kepek a sajat mereseimrol: Sajat mereseim Nezd meg, hogy kezzel megforgatva lassu fordulaton egy nagyon kicsi amplitudoju, de tokeletes szinusz jel generalodik a motoron (szinuszos BEMF). A repulogep motorjan pedig kijott a tokeletes trapezoid, bar mar nem emlekszem, hogy tettem-e bele RC szurot mikor azt mertem (kb 2 eve volt). Tobbinel meg lathatod a tuskeket ami ugye a PWM meghajtasbol ered (csak sajnos ez az LCD kijelzos szkop nem ad ki tul szep kepet, de azert a lenyeg lathato)
Azon vagyok, hogy lefordítsam
Kezdem érteni a dolgokat, és az előző pár hozzászólásban igaza volt icserny-nek! Csak nem tudtam, hogy a PWM és az ADC is létfontosságú! Köszönöm az eddigi segítségeket! Külön neked trundai |
Bejelentkezés
Hirdetés |