Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
Akkor azt mondod hogy a motor és a tranzisztorok kőzé kellene berakni a zénereket

tekercsekkel párhuzamosan a plussz táp fele...
kis türelmet kérek rajzolok róla mert úgy sokkal látványosabb  ... ...
No időközben leporoltam az léptetőmotoros információkat és újra frissítettem ....
 ... ...Megtaláltam azt az oldalt is ahol ezt a zeneres R/L vezénylést is alaklmazzák, én is kipróbáltam ...dolgozik szépen ULN ICvel hajtottam kis Gamma gyártmányú léptető motorokat. léptető motor elmélet Szóval ez a fékezősdi / vissza rugdosósdi itten van leírva pontosan miért is kell zener ... és egyébb kiegészítő alkatrészek 1 kis ohmos ellenállás is. A lap kb 1. negyede után kezdődik 1 jó kis leírás ... "No akkor rajzoltam is meg nem is , mondtam is meg nem is  ... " ... "
Egy fontos dologra azért felhívnám a figyelmet: a paralell porton nincs rövidzárvédelem!!!
Szóval még mielőtt a próbálkozók kinyírnák a portot, tegyenek be minden bithez egy optocsatolót. Utána már késő bánat, nagyon könnyű kivégezni a portot (ez nem soros port). A tranzisztor-zener dologról: valóban így kell csinálni, de mégjobb, ha olyan FET-et használtok, amiben integrálták a zenert is. PL. IRLZ24
Akkor rajzoltam is ha vmi boncsi lenne a uln-ek bekötése körül.
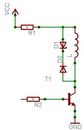
D1 zener D2 sima dióda vmi gyorsabb kapcsoló dióda. L motor tekercse R1 - kis ohmos ellenállás R2 - bázis áramkorlátozó ez most nem lényeg ) Szóval ezt a kiegészítést minden tekercsnél elkell végezni. Dióda a tekercsel párhuzamosan. Nem muszály zenerrel együtt akkor D1 elhagyható. De minden egyébb induktív terhelés kapcsolásánál el kell helyezni ezt a diódácskát tápfesz fele záró irányban a tekercsel párhuzamosan.
Hali akkor gondolom valami ilyen féle kapcsolásra gondoltál?
Kőszike najd kiprobáljuk!
 léptető motrot milyet ajánlanál hozzá és honnan lehetne beszerzni nekem egy tükör mozgatásához kellene 
Igen. Egy kicsit időigényesebb megcsinálni, de nem lesz gond a porttal, ha valami megborul.
Idézet: „Hali nekem ez irja ki 98 alatt:” Idézet: „egy szükséges .DLL fájl, MSVBVM60.DLL ,nem található!” ez könnyen orvosolható: keresd meg, hogy hol van xp-n a dll és másold át a másik, win98-as gépre, ugyanabba mappába. (lehet hogy lesz több dll is amivel ugyanezt kelll tenned.) (egyébként ezek a microsoft visualbasic--es progiknak ilyen "kiegészítője")
Kőszi mársikerűlt is most már műkődik 98 allat is!!

Igen az se hátrány Sőt akkor már TTL buffert is tenni az optok és a printer port közé akkor tényleg nem hajtjuk túl a port kimenei kapuját.
Motort honnan ... sok helyről ... bontott nagy floppyból , CDből ... régebbi nyomtatókból ...különböző börzéken árult cuccok közt turkálva ...stb ..stb
Szétszedtem egy ilyen nyomtatót, hogy kiszedjem a léptetőmotorokat amik egy cnc géphez kellenének.
Tudja valaki, hogy hány voltosak? Főleg a legnagyobb érdekelne amelyik a papírt mozgatja. 9 voltos elemmel tudtam léptetni, akkor 12 voltos lehet?
A tápja 30V-os most néztem meg. Ebből nemtudom mire lehet következtetni.
Ha jól emléxem elég széles feszültségtartományban működnek a léptetőmotorok. nagyobb feszről nagyobb nyomatékot lehet elérni...
A nyomaték a fesz növelés arányábannégyzetesen változik:
azaz, 2x fesz 4x nyomaték (minden elektromos motornál)
Köszi a válaszokat.
Valószínűleg 12 vvoltról fogom hajtani a motort. Remélem lesz elég nyomatéka (M10-es orsóval akarom mozgatni a megmunkálandó tárgyat, meg egy másik motorral a szerszámot)
Nagyob feszültségről meg nagyobb az áram is, aminek az az eredménye, hogy az amperszag is nagyobb.
Viccet félretéve célszerű PWM, vagy chopper módban használni ezeket a motorokat... én az előbbit kedvelem inkább. Ekkor lehet 2-3 szoros is a tápfeszültség, mert a kitöltési tényező állításával szabályozható a motoráram (akár folyamatosan fordulatszám tartománytól függően). Bevallom a choppert nem igazán vágom én sem.
PWM léptetőmotoron
 Igazából csak digitális jelekkel megy nem ? Szóval nem igazán PWM ez... vagy hogy,m lehet, hogy én nem értem. Nekem is van ilyen motorom és többet bír mint 12, otthon megvan az adatlap majd elküldöm. A lapos motorról van szó amin egy réz fogaskerék van ? Igazából csak digitális jelekkel megy nem ? Szóval nem igazán PWM ez... vagy hogy,m lehet, hogy én nem értem. Nekem is van ilyen motorom és többet bír mint 12, otthon megvan az adatlap majd elküldöm. A lapos motorról van szó amin egy réz fogaskerék van ?
mekkora CNC-t akarsz ? (pontosabban mit is értünk CNC alatt ? Gondolom maró... ? Nem biztos, hogy elég lesz hozzá ez a motor...
Egy másik topikban (infra távirányítás) írtam le a pwm lényegét. Illetve megpróbáltam a lényeget közérthetően fogalmazva elmondani ezzel kapcsolatban. :yes:
Remélem kiderül a kis hozzászólásomból, hogy a pwm alapból digitális (két állapota lehet H és L (négyszögjel)). Lényege, hogy az állandó periódusidő mellett állítható az Umax időtartama. Ha Umax időtartama = a periódusidővel akkor egyenáram van, ha az időtartam 0, akkor értelem szerűen 0V van a kimenetén. A kettő között pedig tetszőlegesen megválaszthatom a kitöltési tényezőt. Ezt egy ohmikus fogyasztóra kötve a kitöltési tényezővel arányos áramot kapok (tod... a négyszögjel felbontható végtelen számú színuszjelre). Ez lényeében egy egyszerű D/A konverter. Abba, hogy miért célszerű léptetőmotorokat így hajtani, most nem mélyedek bele (túl hosszú lenne)... talán majd egyszer...
Már én is gondolkodtam ezen, mert én is akarok egy kis pcbcnc-t csinálni. Akkor nekem is azt mondták, hogy felejtsem el, ezek a motorok nem elég erősek hozzá, de azóta gondolkodtam egy kicsit.
Ha nem 1 hanem 2 motort tennék az orsó két végére, ráadásul ezeket áttétellel látnám el, akkor biztos elég lenne. Nekem 4 ilyen motorom van, a 2 irányhoz elég lenne. Lehet ki is próbálom, amint megtudom heggesztetni a cnc vázát.
Öööö... Nem kötekedni akarok, vagy elvenni a kedved, de hogyan fogod a motorokat szinkronizálni?
Mivel a lépésszögük teljesen egyforma nem igazán kell őket szinkronizálni.
Szerintem közös tengelyen van, meg a lépésszög is azonos így ha valamelyik késne akkor a tengely úgy is szinkronizál.
De egy 8-10mm menetes szál szerintem nem fog meg csavarodni a mini cnc miatt. Vagy rosszúl gondolom?
Nem is arra gondoltam, hogy a menetes szárat megcsavarnák. Sokkal inkább a motorokat féltem, nem tdom, nem károsítja-e őket, ha az egyik - mondjuk - egy picit gyorsabban reagál, mint a másik.
(Mondjuk Sirály kollégának abban igaza volt, hogy - amennyiben valóban azonos a lépésszögük - akkor emiatt nem kell(ene) szinkronizálni őket, hisz amúgyis szinkronban mennek.)
Tisztába vagyok a PWM lényegével... de nem tudtam, hogy használják ekte léptetőmotoroknál, amiket ugye már alapból digitálisnak mondható jelekkel hajtanak...
Csak gondolj arra, hogy a léptetőmotorokat álló helyzetben pozicióban kell tartani, ekkor csak egy tekercs gerjesztett, de az folyamatosan. Ilyenkor le lehet csökkenteni a kitöltési tényezőt, hogy kissebb áram folyjék a tekercsen. A pozicióban tartási nyomaték kevésbé romlik, mintha pusztán a feszültségét csökkentenéd.
Ugyanakkor a léptetőmotoroknak meg van az a gonosz tulajdonsága, hogy egy bizonyos fordulatszám felett jelentősen romlik a nyomatéka (rotor inercia), tovább növelve a fordulatszámot, már annyira kicsi a nyomaték, hogy a motor leáll és csak sípol... Szóval a PWM-el megoldható a folyamatos áramszabályozás is a fordulatszám függvényében. Persze ezt nem szokták használni... ez helyett 2 kitöltési tényezőt használnak. Az egyik a pozicióban tartás kitöltési tényezője, míg a másik egy optimális motorfordulatra, és névleges motoráramra beállított kitöltési tényező. Miért jó ez az egész? Magasabb feszültségről járatható a motor, névleges áram mellett. Csökken a tekercsek önindukciója (fékező erő), ezáltal nő a nyomaték
Max A4-es méretben akarok gravírozni, nyákot fúrni, marni, stb. A motorok M10-es menetes menetesszáron keresztül fogják hajtani a szánokat így szerintem elég erős lesz a motor mert az áttétel elég nagy ("aszt hiszem 1,25 mm a menetemelkedés), de szóljatok,ha valaki próbálta már ilyen motorral és nem ment neki.
Egyik tengely a megmunkálandó tárgyat mozgatná a másik a szerszámot oldalirányban, egy harmadik pedig fel-le mozgatná a szerszámot. A vezérlést egy Kcam 4 nevű progival oldanám meg egy egyszerű step/dir vezérlőn keresztül. |
Bejelentkezés
Hirdetés |