Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
Sziasztok!
Mostanában kezdek csak foglalkozni a léptető motorral, így nem igazán mélyedtem el még a témában. De lenne egy röpke kérdésem. Van egy vásárolt léptető motor meghajtóm, amelyben TB6560ahq dolgozik és optocsatolókkal le van választva a bemenete. Van-e jelentősége annak, hogy clk bemeneten mennyi ideig van H és L szint , ha egyébként betartom a minimális időzítési feltételeket? Másként leírva. Ha pl. 20msec-onként léptetem, akkor van-e jelentősége annak, hogy pl. 2 msec-ig tart a H szint és 18 msec-ig az L szint vagy épp fordított arányban? Okozhat-e ez problémát esetleg terhelt motornál, esetleg nem lép be, mert rövid volt az "aktív" idő? Vagy az TB6560 lekezeli ezt és ha kap egy impulzust, akkor addig hajtja a motort, amíg szükséges? Köszi előre is!
Nagy valószínűséggel élre (fel-vagy lefutó él) kapcsol az ic bemenete ezért az impulzus szélessége nem igazán számít , ha elég széles a léptetéshez már jó . A tartóáramot az ic generálja, a léptetés meg csak a beállításoktól és a léptető impulzusok számától függ .
Köszönöm a választ!
Én is így tippeltem a működést. Most megcsináltam úgy a vezérlést, hogy a teljesítmény rész csak léptetésre kap rövid negatív impulzust, de kíváncsi leszek, hogy terhelés alatt mit csinál majd fordított arányban. Na, de ez már a következő hét feladata. 
Ha jól értelmezem az adatlapban 15kHz lehet a max. léptetőfrekvencia és 30us a min. impulzusszélesség.
Én is ezt olvastam ki az adatlapról. Azonban a motor is korlátozhat, illetve annak tehetetlensége. Gondolom én, tapasztalatlan.
Egy 3A-as motort üresen hajtottam meg és kb. 1kHz volt a jellemző max. léptetési frekvencia. Így aztán most úgy állítottam be a Tiny45-ös ic-ét, hogy max 300Hz-es legyen a frekvencia és 1msec az L impulzus szélessége. Ezzel szépen dolgozik, tesztekhez jó lesz.
A 15 kHz nagyon bátor szám, ha ezt tudná pl egy 96 lépéses ( ami nagyon finom motor) léptetömotor, akkor annak majdnem 10000 ford/perc gyorsan kéne forognia. A normális motorok ennek az 1/10 jo ha tudják.....
Idézet: A legtöbb hobbigépben is 200 lépes motorok vannak 1,8fok/ lépés és még ennél is" finomabb " ha mondjuk 1/16 mikrolépéses beállítást választasz. Ha jól számolom 3200lépés/fordulat itt már nem is olyan sok a 15Khz „pl egy 96 lépéses ( ami nagyon finom motor)”
Az igaz, de ott is azért 300 ford/percnél tartasz, és nem sok értelme van ilyen sebességhez mikrolépést használni... Ha ilyen gyorsaságra van igény akkor aligha van igény a mikrolépésre.
300 fordulat percenként , 1500mm/ perc 5mm es menetemelkedéssel számolva tényleg sok lenne ? Akkor az én gépem bizony nagyon gyors mert éppen 3000mm/perc sebességre van beállítva 1/16 mikrostep és sorozatfúrásnál (nyákfúrás) teljesíti is ezt folyamatosan gond nélkül ,ja és csak 3mm a menetemelkedés!
A hozzászólás módosítva: Jan 3, 2016
Bizony sok! Ne feledd nemcsak a motornak kell forognia, hanem a nehéz tengelynek ami még nehezebb konstrukciot mozgathat (most függetlenül attol, hogy mire is használod). Még esetleg valamilyen modelljármüben használhato lenne, de félek, hogy oda a nagy 200 lépéses motor nem fér el.
A CNC gépekben 1-2 mm-s menetemelkedés szokott lenni. Ott a 300-600 mm/perc még ugy ahogy elmegy ( ha nem tul nehéz a gép). Amugy amilyen motorokkal eddig szerencsém volt ( nem is kevés) ugy 700-800 lépés/perc körül kezdtek el tiltakozni ( lépésvesztés stb).
Lehet hogy igazad van de már régen nem arról beszélünk amiről amiről a beszélgetés kezdődött ! (15Khz)
Idézet: Nem lehet hogy valamit elszámoltál ? Percenként 4 fordulat már egy lovaskocsi kerekénél is lassú „ugy 700-800 lépés/perc körül kezdtek el tiltakozni ( lépésvesztés stb).” 
mm/ percet ...
 de mindegy is de mindegy is A hozzászólás módosítva: Jan 3, 2016
700-800 lépést/másodperc
Hogy pontos legyek....
Ott valami nagyon nem stimmel! Egy 200step/fordulat motort nézve a 800step/sec érték csak 4 f/sec, azaz 240 f/min. Ettől a leggagyibb kínai vezérlővel hajtott, nyomtatóból bontott motorok is többet tudnak.
Az attol függ milyen a motorod. (Egyáltalán nem azon mulik, hogy kinai vagy nem).
Olvastad, hogy mit írtam?
Idézet: „nyomtatóból bontott motorok” A vezérlőre írtam, hogy kínai. A kínai "kék" 3 tengelyes vezérlővel nem lehet túl nagy sebességet elérni, mert rossz konstrukció, de 30V körüli tápfeszről azért többet ki lehet hozni belőle mint 240 f/min. A hozzászólás módosítva: Jan 4, 2016
Sziasztok! Adott két léptetőmotor amit nyomtatókból bontottam annó. Arra gondoltam jó volna egy CNC gépet készíteni, ami egy lézert vezérelne. Leginkább fényérzékeny nyákot szeretnék nyomtatni vele, kezdésnek meg is felelne. Nos az egyik léptetőmotor 6 eres, színei: barna, fekete,fehér,piros,sárga,kék, feliratai: Berger LAHR RDM 42/12 G A2 Iw=200mA, Rw=50 ohm 12037130000 Germany 0039. A másik léptetőmotor egy cannon BJC-1000(nem emlékszem pontosan már, de teljesen ez a design, két nyomtató volt egy szines és egy fekete/fehér, a szintes azt hiszem BJC-2000 volt.), a léptető motor cimkéjén ezt találtam: MITSUMI M42SP-4NP QH4-4240 LOT NO.T X9315 11 ohm, 4 vezetékes egy kék a többi 3 sárga. Nekem fogalmam sincs hogyan működnek ezek a léptetőmotrok, valaki nem tud ajánlani valami olvasmányt?
És amikor rákerestél ezekre a típusjelölésekre, mit találtál?
Sziasztok!
Szeretnék két léptetőmotort vezérelni, ami rendelkezésemre áll: Cubloc CB290 embedded microcontroller 2db Nema11 léptetőmotor 2db encoder, 10kimenettel A motor és az encoder adatlapja: Encoder+motor adatlap MOT-AN-S060-001-028-L-C-AAAC 2db Solarbotics L298 léptetőmotor vezérlő (szett) Segítségre lenne szükségem, hogyan kössem be a motorokat+motorvezérlőt+encodert+mikrovezérlőt, hogy az használható legyen. Célom, hogy tudjak a motoroknak egy nullpontot adni, hogy az adott gép indításakor mindig arról a pontról induljon a munkafolyamat.
Sziasztok
Hozzám került egy carl zeiss jena ips3-20 motor. Ki szeretném próbálni egyenlőre, aztán valamit csinálni vele Semmit se tudok róla hogy hogy működhet. Remélem valaki tud benne segíteni 6 kivezetés van rajta három három egyforma szín meg még strom pro phase 3A ilyen felirat.
Sziasztok!
Elég kezdő vagyok még a léptetőmotorok vezérlésében éppen ezért itt kérek egy kis segítséget! A lényeg az lenne hogy van egy Arduino Uno R3 vezérlőm és ahhoz van L298n meghajtóm. ezt a kettő egységet szeretném össze hangolni ahhoz hogy egy léptető motort tudjak vele működtetni egyenlőre ,,csak" annyi lenne hogy forogjon körbe körbe és egy idő után váltson forgás irányt! Na ehhez szeretnék egy kis segítséget kérni hogy kell maga a vezérlő programot meg írni rá?
Ezt a kérdést, inkább az arduino témában tedd fel.
Sziasztok!
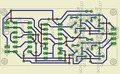
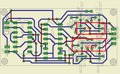
Google segítségével terveztem egy step/dir rendszerű léptetőmotor vezérlőt. Az a gondom vele, hogy a tranzisztorok (bc337/bc327) motor nélkül bekapcsolva nagyon felforrósodnak, szerintem el is olvadnának, ha nem kapcsolnám ki. Motorral is csak forrósodik, nem léptet. Mellékeltem képet a kapcsolásról és a nyáktervről. Mi lehet a hiba? Előre is köszönöm!
Üdv
Tranzisztor csere a keretezett részben . Üdv
Köszönöm válaszod! A rajz elég sűrű, így nem olvashatók a nevek, de a keretezett részen olyan tranzisztorok vannak, mint amilyet odaírtál. (a kapcsolási rajz hasonló elrendezésű, azon látszanak a nevek) Tehát fentről lefelé 327-337-327-337 és a két oszlop egyforma.
Már csak a diódák hiányoznak a tranzisztorokról.
Igazad van, de még sajnos mindig forrósodik, és nem a diódákon múlik szerintem.
|
Bejelentkezés
Hirdetés |