Fórum témák
» Több friss téma |
Sziasztok!
Külső forgóházas modell motorra csinált más valaki hall szenzor tartót? Milyen tapasztalok vannak erre vonatkozóan? Felfogatás és szenzor típus? Köszi előre is!
Szia!
A modell motor elektronikák általában nem igénylik a hall szenzoros pozíció információkat, a belső feszültség alapján kommutálnak. Neked miért van erre szükséged? Mivel az állórésznél nem hagynak ki nekik helyet, mint mondjuk az elektromos kerékpárok motorjában, szerintem utólag csak olyan szenzorok jöhetnek szóba, amik pl,: a CD-Romok motorjaiban szokott lenni.
Szia Péter!
Alapvető célom, hogy alacsony fordulaton is üzemeltessem a motort. Pl. képes legyen az autó/hajó nagyon lassan is menni, ha valahová be kell állni vele. Sajnos az általam ismert "gyári" szabályzók olyan fordulaton kezdenek dolgozni, ami már jelentős sebességet ad az adott járműnek. A neten láttam már egy-két ilyen külső ráépítésű szenzort és ilyenről szeretnék tapasztalatot szerezni. Most egy vezérlőm ebben a fejlesztési fázisban egy 4800 KV értékkel bíró, belső forgórészes szenzoros motort hajt. Üresben végzett tesztek alapján 12V-os akkuval nagyon szépen tarja a minimumnak beállított 800-as fordulatot. A terhelések tesztekhez a motor beépítés alatt van. Majd meglátom mit hoz a jövő. 
Hali!
Elkészítettem a bldc vezérlőm. Viszont a felső nFet-ek nem az elvárt módon melegszenek. Ezzel kapcsolatban kérdezném, hogy ki, hogyan oldotta meg a vezérlő logikát, illetve a kikapcsolási áramlökés problémáját? Jelen pillanatban a 10kHz-es PWM jel az alsó nFET-eket vezérli LM5101 meghajtókon keresztül. A felső nFET-ek szintén ezen meghajtók segítségével kapják a megfelelő szintet. A forgórész pozícióját a sensorok adják, meghatározva azt is, hogy melyik felső nFET legyen nyitva. Abból gondolom, hogy kikapcsolási áramlökésekkel lehet a baj, mert a szabályzó 20-30A-es terhelés mellett is dolgozik (de rövid időre kipróbáltam az 50A-t is). Az alsó FET-ek alig melegszenek, míg felsők megérinthetetlenek 1-2 perc után. (Az idő persze függ a terheléstől is.) Kíváncsian várom, hogy kinek milyen tapasztalata van. Üdv!
A csatolt rajzon nem látni a főáramkör kialakítását, illetve a fetek meghajtását, ezért nehéz érdemi választ adni.
A kikapcsoláskor a felső hídági fet parazita diódája mindenképpen átveszi az áramvezetést, de kevesebb a disszipáció, ha be is kapcsolod, azaz a feteket ellen-ütemben (kis szünetidővel) vezérled.
Szia!
A meghajtó rész rajza a meghajtó gyári ajánlása szerinti. A Cboost kondi 1µF-os, amely elég nagy érték, hogy a szkópos mérés esetén (műszer bementi ellenállás) is tartsa szükséges nyitófeszültséget (Ugs>9V) A TI link: Bővebben: Link A nyák rajzot tudom átküldeni, remélem az is elég lesz. (Remélem az utolsó állapot van ezen a gépemen!) Érdekes volt az is, hogy az akkuval párhuzamosan kötött szűrő kondi (3x470µF low esr) szintén nagyon melegedett. Hétvégi tesztek során leveszem a PWM frekvenciát 5kHz-re, mielőtt átdolgozom, átalakítom a FET kapcsolási logikát. (Kefés motoroknál ugyanis a felső nFET-eket szoktam kapcsolgatni a pwm freki szerint. Ott eddig bevált a uP-nak munkásabb vezérlés.) Miközben írom ezeket a sorokat, egy dolog még eszembe jutott, ami még gyanús. Az pedig a szupressor dióda. Remélem nem nyúltam mellé a fiókoknak és a 18V-ost tettem be. Ezt még ki fogom próbálni. Lehet, azzal, hogy az alsó nFET-et kapcsolgatom, sokkal magasabb lett az indukált feszültség??? Na, majd hétvégén kiderül. Üdv!
Szia!
Néhány gondolat: 20-30-50A-hez nagyon kevés a 3x470uF. Nézd meg az adatlapjukban mennyi áramot bírnak, és látni fogod, hogy nem véletlenül melegszenek. Nem írtad, hogy ellen-ütemben vezérled-e a felső feteket. Ha nem, nem csoda ha a diódákon eső feszültség melegíti őket. A nyákterveket nagyon rossznak találom: A meghajtókat közvetlenül a fetek bemenetéhez kellene tenni, nem szerencsés, hogy külön panelon vannak. A főáramkör két dc síne olyan nagy hurokkal záródik a kondikra, hogy csodálom, hogy nem mennek tönkre a fetek. A +ág kondenzátor kivezetések, fetek félhídjai, -ág kondenzátor kivezetések nagyon kis hurokkal kell hogy záródjanak. Legjobb, ha a nyák két oldalán lévő nagy felületek, a félhídak párjai egymás mellett szorosan vannak. Érdemes volna egykét ilyen jellegű nyáktervet átnézned, és azok elrendezését követned (D osztályú erősítők, frekvenciaváltók stb.). Ha jól van kialakítva a rajzolat, nem lesz jelentős feszültség emelkedés a feteken, mert a kondenzátor telep felveszi az áramot. Ennek elősegítésére a fetek mellé kellene tenni a dc sínre fólia kondezátor(oka)t, ami nagyfrekvenciás szempontból jobb, mint az elkók.
Köszi a tippeket!
Meglátom, mit tudok tenni az ügy érdekében. Egyenlőre ezzel a nyákkal kell megküzdeni, annak minden problémájával együtt. Üdv!
Én gondolkodom egy vezérlő építésében, ki is szereltem pár CD forgatómotort, de nem találtam adatlapot mekkora feszültség-áram kell neki. Valakinek van erről tapasztalata?
A BLDC motor a szinkron motor családjához tartozik, ilyen adatokat csak egy munkapontba lehetne megadni (lehetne mondjuk névleges értékről beszélni). Ehelyett részben más jellemzőket szokás megadni. A modell motoroknál is a legfontosabb a KV érték, ami a percenkénti fordulatot adja meg a feszültség függvényében. (A motorra adott feszültségnek a fordulattal arányban emelkednie kell.)
A legegyszerűbb, ha a te motorod esetében te magad határozod meg ezt. Forgasd meg a motor forgórészét, és mérd meg a tekercsen indukálódó feszültséget. Ebből máris képet kaphatsz, hogy a jelenlegi tekercseléseddel mekkora fordulatszámhoz mekkora feszültség tartozik. Régebben LG52x CD-ROM meghajtóból kivett motoroknál 1100 1/min értéknél csúcstól csúcsig 2V-os feszültség indukálódott (kettő fázis között mért). 5V-os tápfesszel tehát kb. 2500 1/min lehetne elérni. Az áram értékre a tekercselő huzal keresztmetszete alapján is becslést lehet tenni. Szerintem korrektebb, ha megméred a tekercsek ellenállását, és abból máris kiszámolható, hogyha megengedsz 1-2W veszteséget, mekkora árammal terhelheted a tekercseket. Megjegyzem, hogy sokan áttekercselik ezeket a motorokat, hogy megváltoztassák a motor jellemzőit, növeljék a motor teljesítményét. Találhatsz több ilyen főrumot is, és ott az ilyen átalakított motoroknak a jellemzőit is megtalálod. A BLDC motorok tápegységét többféle megközelítéssel is fel lehet építeni, hasonlóan a DC motor vezérlőkhöz. A korrekt megoldások fordulatszám szabályozást és alárendelt áramszabályozást is végeznek.
Köszi a segítséget. Nincs kimondott célom, csak gondoltam ezen a motoron gyakorolok. Megmértem, a tekercs ellenállása 1 Ohm, 150uH , tehát ha 2W veszteséggel számolok kb. 1,5A körüli áramokra számíthatok. Nem igazán lényeges, csak az áramfigyelő sönt kialakítása miatt gondolkoztam el rajta, de lehet betervezek a nyákra egy OPA-t is ha kell lehessen erősíteni. Találtam a fiókban egy 16F1788 PIC-et (ha még jó egyáltalán, mert már használtam valamire), ebben van 3 fázisú híd vezérlés beépítve. Valami olyan nyák kialakításán gondolkodtam, ami többféle bekötést is lehetővé tenne. Ezért is gondoltam erre a motorra, mert itt lehet BEMF-et vagy hal elemet is használni. Teszek rá LCD kijelzőt is, mert a PWM-es DC motor tesztelésnél nem volt öröm a 4 digites kijelző
. A gyártói AN-ek tanulmányozása után valami ilyen megoldásra gondoltam.
A fet meghajtás nekem nem tetszik. Nem értem miért ilyen, főleg a P csatornás fetek esetében.
Ha már 5V-os a vezérlő, gyakorolgatáshoz megtenné, hogy a motort is arról járatod, és akkor a klasszikus npn/pnp emitter követőkkel lehetne a PIC kimeneteiről közvetlenül meghajtani a feteket. 3 fázisú hídvezérlés nem feltétlenül kell. Alap BLDC vezérlés esetében elég egy pwm is, ha a három fázisra át tudod kapcsolni (külső logikai kapukkal is lehet). Ekkor a P csatornás feteket a fázislépésnek megfelelően kapcsolgatod fix jellel, és csak az éppen aktuális fázist vezérli a pwm. Alap dolgokhoz elég lehet egy 8 bites PIC, de rendes szabályozáshoz szerintem 16 bites processzor kell.
Nekem tetszett, mert hülyebiztos. Szerintem azért van közös emitter ellenállásuk a P-FET-eket vezérlő tranzisztoroknak, hogy ne lehessen egyszerre kettőt kinyitni. Az alsók pedig automatikusan lezárnak, ha a felső kinyílik. Bár én még soha nem építettem semmilyen hidat. Azért gondoltam ilyenre, hogyha másik motort használok emelhessem a tápot magasabbra is.
Szerintem nem "hülyebiztos". Egy gyors P-ről N fetre való kapcsoláskor jó eséllyel össze fognak kapcsolni. A közös emitter ellenállással sem lehet szerintem hatékonyan védeni a téves kapcsolások ellen.
A meghajtó fokozatnak szerintem az a legfontosabb feladata, hogy biztosítsa a teljesítmény félvezető minél kisebb veszteséggel történő kapcsolását. Még hangsúlyosabb ez PWM szabályozásnál. A fetek esetében a gate köri töltések betöltése és kiürítése akadályozza a gyors kapcsolást. Ez a kapcsolás meg a még problémásabb P csatornás fetek mellé odatesz egy kondenzátort is, had legyen még lassabb a kapcsolás, főleg a kikapcsolás. Ha emelni akarod a tápot, kb. 15-20V-ig lehet ésszerű ez a P-N fetes félhíd. A szinteltolásra vannak diszkrét korrekt megoldások, de rengeteg fet meghajtó IC közül is lehet választani. Ha meg nagyobb feszültséget szeretnél, akkor már érdemes csak N fetekkel építkezni, és valamelyik félhíd meghajtót használni.
Igen, én is gondolkodtam más megoldásokon. Van itthon MC34151/152 meghajtóm de gondoltam megtartanám valami komolyabb projekthez. Nézegettem még az ADP3110-et (mert ezek vannak régebbi alaplapokon), de végül úgy gondoltam csinálok egy egyszerűbbet maradék alkatrészekből.
A P fet kondiján én is elgondolkodtam ( az F1 fejlesztő BLDC modulján van ilyen), de úgy gondoltam, ha nem tetszik majd nem ültetem be. Itt mekkora PWM frekvenciát szoktak használni (kb. 5-10 000rpm környékén), első körben 20kHz-t gondoltam, vagy ez magasabb fordulatoknál kevés lesz?
Ha vannak maradék alkatrészeid, tranzisztoraid, teljesen jók a diszkrét emitter követős meghajtók.
10000rpm kb. 167Hz-nek felel meg, a 20kHz teljesem jó. A BLDC elvű vezérléseknél amúgy sincs különösebb torzítási követelmény, mint egy D osztályú erősítőben. Ha az áram meg egy kicsit hullámos, az nem okoz gondot.
Sziasztok! Lassan egy éve keresek manapság is gyártott, beszerezhető, alacsony fordulatú(50-300hz) es villanymotort, ami nagyon halk!
Egy mobiltelefont szeretnék fele forgatni egy mikrofon elött, nincsen szükség nagy teljesítményre, csupán kompakt méretre. Vezérléssel kapcsolatban mikrokontrolleren gondolkozom. Nagyon sok oldalt néztem meg, rendeltem is már, de csak megy a pénz ki az ablakon, mert eddig egyik sem volt megfelelő gyakorlatban. Esetleg a ventillátormotorok mennyire bírják a terhelést?
Szia!
A fordulatszámot gondolom elírtad, nem másodpercenként akarsz 50-300 fordulatot (Hz), hanem percenként(rpm, vagy 1/min). Ilyen kis fordulatra szerintem léptető motort kellene használnod, az egyenletes és zajtalan üzem érdekében mikrolépéses üzeműt. Jó lehet a témába vágó BLDC motor, de azt is vektorosan (háromfázisú szinuszos áram táplálással), akár nyílthurkú meghajtással. A ventilátor motorok egyfázisú BLDC motorok, nem igazán jók kis fordulatra. Költséghatékony megoldás lehet, egy nyomtatóból kibontott léptetőmotor, vagy egy CD-ROM lemezforgató (esetleg HDD) BLDC motor. Ha a léptetőmotort választod, akkor léptetőmotoros fórumban érdeklődj tovább.
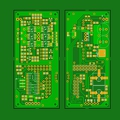
Rajzoltam egy első verziót, még nincs rajta minden alkatrész, de kérdezném első körben megfelel-e, pl. nem jelent problémát a földhurok, vagy a másik oldalon inkább csináljam teli földesre, vagy inkább a fetek hűtőfelületét maximalizáljam, akár a másik oldalon is.
HDD motorral és MTD6501 vezérlővel én is játszottam régebben, de nem nagyon tudtam vele 1000rpm alá menni.
Teli földes kellene, a szélén a körbevezetésnek túl nagy az impedanciája. Az áramérzékelő söntöt is jobb lenne több ellenállásból összeépíteni, hogy kisebb legyen az induktivitása.
A dc sínt jó lenne hidegíteni a fetek mellett két oldalt, akár nagyobb méretű fóliakondenzátorral.
Eddig jutottam, ha nem is lett teliföldes, de igyekeztem. A PIC leválasztható, ha valami komolyabb motort kellene tesztelni másik híd is használható legyen. Így pont akkora, mind a 2x16-os LCD kijelző. Így a kép alapján látom lehet még kicsit tologatni az alkatrészeket
.
A fetek lábainál a DC sín hidegítését még nem találom elégségesnek.
A probléma az, hogy amikor az egyik fet kikapcsol, a motor áramának át kell terelődnie a másik fet parazita diódáján keresztül, úgy, hogy közben ne keletkezzen olyan nagy túlfeszültség, ami tönkre tenné az éppen kikapcsoló fetet. Ezt csak úgy lehet elérni, ha ezt a kört minél kisebb induktivitásúra alakítjuk ki (mínuszpont-sönt-alsófet-felsőfet-pluszpont-kondenzátortelep-mínuszpont). Ez olyan mélységig fontos, hogy a tok kivezetésének impedanciáját, induktivitását is figyelembe kell venni. Éppen ezért, nem szabad több centis hurkokat kialakítani a sorba kapcsolt félvezetők (félhidak) és az áramot magára vevő kondenzátor telepek között. Ha az adott elrendezésnél maradunk, akkor azon az oldalon, ahol az elektrolit kondenzátorok vannak, a panel bal oldalához közel a PIC-hez menő vezető sávokat vezesd ki teljesen a panel bal szélére, és az így próbálj meg helyet kialakítani arra, hogy a fetek alatt minél szélesebb sávval összekösd a söntnél lévő mínusz pontot a kondenzátorok mínusz pontjával. Ha ez nem megy, megoldás lehet, ha 3-4 vezetékkel átkötöd a mínusz pontot, amiket szorosan a panelhez simítasz. Nagyon jó, hogy egy kondenzátort tettél a fetek mögé, ami a DC kört hidegíti. Ezt kellene még javítani. Nem jó, hogy egy smd alkatrész lábai között át kell vezetni a csatlakozást, mert a vezető sáv leszűkítése növeli az induktivitást(vagy több sorba kapcsolt elemből állítsd össze, és akkor hálószerűen átvezethető a plusz pont, vagy ha másként nem megy, használj átkötést). Jó lenne legalább még egyet tenni a kapcsoló fetek másik szélére, azaz a panelon lejjebb. A fetek alsó összekötését lehetne szélesíteni a gate-k felé és a negatív sin felé.
Köszönöm az okítást, remélem jó tanítványnak bizonyulok
. Már tegnap átrajzoltam ezt-azt. Utólag az jutott eszembe, hogy a föld átkötéseket akár a kijelző paneljén is kialakíthatnám, az szinte üres.
A főáramkör kialakítása szerintem így már jó, csak egy módosítást javasolnék; a söntöknék (a söntök alatt) a mínusz táp vezetékbe tegyél végig viákat, hogy meglegyen az átkötés a két oldal között minél kisebb induktivitással. Hasonlóan a pozitív táp pontnál érdemes volna még a meglévő 2+3 mellé néhány viát betenni (mondjuk még egyet-egyet a fetek mellett).
Az is jó ötlet, ha más panelon alakítod ki az átkötéseket, de csak akkor hatékony, ha közel, néhány milliméterre van felette/alatta. A föld esetében lehet ez mondjuk egy tartó alumínium lemez is, ami több ponton össze van csavarozva a panellel.
Sajnos fiókban talál PIC tényleg hibás volt, így elmentem vettem másikat, de ha már ott jártam vettem MCP8026 vezérlőt is. Nem tudom próbálkozott ezzel már valaki, van-e valami tapasztalat?
600W-os áramkörrel próbálkoztam. 250W-os motort meghajtani.
Két probléma jelentkezett: fékezésnél visszatermel az aksiba ( talán 1 dióda megoldaná? ) nagyon gyenge és lassan gyorsul, le esik a feszültség ( puffer kondi ? de mekkora ? ) Az áramkör: DC-DC konverter.http://www.elektrobot.hu/termek.php?filename=DC-DC_konverter_boost_600W.html& A motor: 250W 36V áramfelvétel MAX: 8A Mit lehetne tenni. Spórolásról szól a dolog. 3 akku helyett 1 nagyobbat. 3x15Ah--> helyett 1X 40 Ah. Az akkucsere költsége durván harmada lenne.
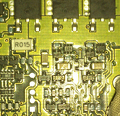
Nem tudom pont ide való-e, de találtam a neten képet gyári vezérlőkről. Az egyikben pont PIC vezérlő van. A hídban csak N fetek vannak, de nincs meghajtó áramkör, hanem valami level shifter/bootstrap áramkör van. Ismeri ennek valaki a kapcsolását. A kép alapján két PNP és két NPN tranzisztor van benne, egy dióda és a nagy kondi. Sajnos csak a kép van meg
.
Hello! Nem ismerem, de nagy valószínűséggel ugyan az van benne, mint amit itt is alkalmaznak, csak még tranyóval.
A hozzászólás módosítva: Aug 4, 2015
Igen, csak mivel ez egy gyári megoldás érdekelne a mikéntje. Otthonra megfelelne a 10 évvel ezelőtt alkalmazott profi megoldás is.
|
Bejelentkezés
Hirdetés |