Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
A következő dologra kellene gombot varrni:
Odáig eljutottam, hogy a Mach3 motor tuningban tökéletesen egyenletes a motor járása, viszont ha le okézom, és visszakerülök a főképernyőre, akkor ugyanúgy viselkedik, tehát mintha "homok került volna a fogaskerekek közé" Ha a motor tuningban beállítok pl 2000-es sebességet, akkor gond nélkül viszi, azonban ezt le okézva a főablakban már nem hajlandó ezzel a sebességgel forogni a motor. A motor 24V dc-ről megy.
Van az ablakban egy mentés gomb. Segítségével hosszútávú javulás érzékelhető
 Illetve a MAch3 főablakában 3 féle sebesség van: gyorsjárat: 100% sebesség: shift + nyilak kézi üzemeltetés: TAB gomb esetén beállítható százalékban, simán nyilak léptetés: TAB gomb esetén beállítható a felbontás: CTRL + nyilak A hozzászólás módosítva: Feb 8, 2013
Nem az a baj, sajnos. A Save Axis Setting-et mindig nyomom.
A nyomtatóport BIOS-ban lévő létező összes beállítást kipróbáltam, még az EPP-t is, mind ugyanúgy viselkedik. Talán a "printer" nevű beállítás kicsit simább, de mégis ahhoz tudnám hasonlítani a motor hangját mint, mikor valamilyen szennyező anyag van a forgórészbe akadva, (por, homok) és ettől ropogó hangot ad. A motor tuning-ban változatlanul szépen simán jár a motor, mindenféle ropogás nélkül. Én már arra gyanakszom, hogy:1. Csak egy 74244-es buffer van a portra kötve és nincs megfelelő jelszint. 2. Ilyen a számítógépem (asztali Fujutsu Siemens gyári konfig) Sajnos egyébb számítógéppel egyenlőre nincs lehetőségem kipróbálni. No meg igazából erre vettem a siemens-et.
Úgy tűnik, kisöpörtük a homokot a gépezetből!!
A hiba a számítógépben van. Böngésztem az Artsoft oldalon és kerestem, hogy a Mach3-nak milyen a rendszerkövetelménye. Ott gyanús volt, hogy integrált videokártya nem javallott a gépben. Nekem pedig pont hogy integrált videokártya van a Siemens-ben. No akkor kapom magam szereztem egy másik gépet, amiben rendes videokártya van, és láss csodát tökéletesen sima a motor járása minden tekintetben.
Hali!
A kérdésem elméleti jellegű. Ha egy motor X nyomatékot tud pl. 200 pps-el (ez ugye 200 darab egész lépést jelent másodpercenként), akkor a fél lépés finomsággal 400 impulzust is elbír ugye? Mert elvileg az a fordulatszám nem változik, ami mellett tudja azt az X nyomatékot. Tehát a kérdés máshogy feltéve a nyomatékot a fordulatszám függvényében kell-e értelmezni, vagy a mindenkori frekvenciában, függetlenül a lépések finomságától?
Fordulatszám.
A katalógusok is ezt adják meg. Keress egy profi motor nyomatékgörbét, és egyből látni fogod.
Helloka. Most ismerkedem a léptetőmotorokkal, olvasom sorban a fórumot, de kezdettől több ismeretlen fogalommal találkoztam, no meg olykor el is tér a téma a tárgytól kicsit
, így rákerestem először az alapokra. Ezt az oldalt találtam, gondoltam, belinkelem, hátha más kezdőnek is jól jön Léptetőmotorok működése Ezek után olvasgatok tovább
Sziasztok !
Átböngésztem a Net-et és rengeteg bipoláris léptetőmotor meghajtó kapcsolást találtam (l297+l298, l297+l6203, TBA6560, stb), de ezek a NEMA23 méretű motorokig használhatók, de mi van a NEMA34 , NEMA42 motorokkal 6-8-10-12A és legalább 48VDC , de lehet 60VDC is. Ezekhez valami normális H-hidas MOSFET kellene gondolom, de erről nem találok STEP/DIR kapcsolási rajzot. Tudna valaki segíteni benne ???
Aki keres az talál:
http://robozone.su/ http://robozone.su/2008/09/03/kontroller-unipoljarnogo-shagovogo-dv...a.html Üdv
Oké, de ez unipoláris vezérlő én meg 2 phase Bipoláris vezérlőt keresnék !!!
Sziasztok
Kaptam egy bipoláris léptető motort (QH4-4297 illetve B2Z11 - ezek vannak ráírva), interneten nem találtam hozzá információt. Most ismerkedek vele, úgyhogy tulajdonképpen csak valahogy életre szeretném kelteni a lehető legegyszerűbb módon. Ebben kérném a segítségeteket Általában mekkora feszültséggel működnek? 5V-al próbáltam ingerelni, azzal szépen helyben tartja. A kérdésem az lenne hogyha simán, 5V-ot adok hol az egyik, hol a másik tekercsre akkor így működni fog e? Ha igen akkor kb milyen időközönként kellene váltanom a tekercsek között? Köszi a válaszokat!
Nekem is ilyen kapcsolás kellene, L297 lenne a vezérlő mert jól bevált, az L298 kellene helyettesíteni egy FET-es H hídkapcsolással, a FET meghajtást IR2102 IC vel gondoltam, sajnos kell egy logikai áramkör amely kikapuzza az L297 INH1 INH2 kimenetét -fél lépés esetén-, csak az L297 áramméréséhez nem tudom bezavarnának-e a visszafutó diódák, vagy ezt le kellene választani, pl alsó oldalra IGBT és külön dióda ami nem az árammérő ellenállásra megy hanem a földre, meg lehet a floating táplálást is meg kell oldani egy segédtáppal ha nincs lépés vagy pwm szabályozás, de ha kell segédtáp akkor inkább TLP350 optocsatoló meghajtás.
Sziasztok!
Léptető motor vezérlésbe kérnék segítséget. Elég sokat bújtam túrtam a netet, és ha minden igaz akkor a vezérlését kezdem megérteni. Mondjuk egy 5 kivezetéső motor vezérlése a közös szál megkapja a pozitívot a maradék 4 kivezetés pedig sorban kapja a gnd-t és akkor elvileg forogni fog. ( Eltekintve a különböző lépéstípusoktól feles, dupla, sima, stb, stb) a forgás sebessége pedig a tekercsek váltakozásától függ ( nagyon szummázva) Elvi kérdés PIC-es vezérlésnél mondjuk egy sima forgatáshoz 4 kivezetésre sorba folyamatosan adok jelet, amit mondjuk egy ULN2003-ason keresztül ráteszek a motor 4 tekercskivezetésére. Elvileg ez így stimmel ugye? Na most..... a forgáshoz adom a tekercsekre a szimpla üzemi feszültségét, de honnan tudom hogy mondjuk "tartáshoz" mekkora feszt engedjek rá? Amúgy a motor egy sima tükör lencsét forgatna tehát nem fontos a milliméter pontosság ( esetleges lépésvesztés) de nem is forgat nagy súlyt tehát tehetetlenségből nem nagyon fog túl forogni.... Mennyit lehet hajtani ezeket a motorokat? ( percbe értem? ) mert nekem jó lenne néha ha fél órát.... órát is lehetne hajtani.... Nagyon sarkítva a példát egy ilyen motort szeretnék használni (elvileg simán elég a műanyag foncsorhoz) és hogy egyszerűbb legyen mondjuk egy ilyen meghajtóval... tehát erre tenném rá a PIC vezérlő jelét. Elvileg jó az elképzelés? Köszönöm
Szia!
Ezt a motort, ezzel a meghajtóval együtt vettem az e-bayen kb 500Ft-ért. Ez egy áttételes motor, fogaskerekekkel. Nálam is PIC hajtja, de ha nem fontos a pontosság, akkor szerintem más vezérléssel is hajthatod.
Ha eleve forgatni akarod a motort, akkor felesleges a tartással foglalkozni, hiszen a vezérlöáramköröd (barmilyen, akár sima 555-s is) gondoskodik arrol, hogy az adott pillanatban valamelyik tekercsen áram folyik.
A tarto áramról akkor kell gondoskodni, ha a motort szögvezérléssel használod, azaz nemcsak forgatod, hanem az adott esetben meg is állitod stb. (azaz az elektronika egy adott helyre forditja a motort majd ott néhány pillanatra vagy bizonyos idöre megáll és ez fontos, hogy ott maradjon.) Amugy az ilyen motorok elvileg korlátlan ideig foroghatnak, szoval ezzel sem kell igen foglalkozni. Legfeljebb ügyelni a tekercsek áramaira. A sima forgáshoz kevesebb árammal is boldogulsz, mint a szöghajtásnál (a motorok viszont általában az utobbira vannak méreteve és ehhez adják meg a jellemzöiket.)
Szia Baloka!
A pontosság annyira nem fontos (értem itt hogy nem szigorúan fok pontosan kell forognia) Ami miatt a PIC-es vezérlésen tanakodom az az hogy akkor programozhatóan foroghatna.. Értem itt ez alatt pl: lassu forgás, gyors forgás, pásztázás, remegő pásztázás, stb stb ezért is nem sima elektro motorral forgattatom mert ott max a sebességet tudnám szabályozni, de azt se pontosan, így meg igaz hogy stepper motor meg egy PIC-et is "megeszik" de sokkal több mindent lehet vele megcsinálni, és nem is hú de bonyolult programozással... Apropó akkor Te is csak simán rá tolod a PIC jeleit a vezérlő/meghajtó panelra ugye?
Szia Massawa!
Igen effektíve forgatásról lenne szó különböző sebességgel átlagba 0,5-1-3 fordulat per perc. nem tudom hogy ezeknek a motoroknak mekkora a a tehetetlensége. Elmondok egy példát hátha úgy jobban sikerül elmogyoroznom mire is gondolok Forgatom afoncsort mint itt a képen amíg forog és megy a program addig tudom (helyesebben a pic tudja hol van) de ha kikapcsolom akkor elvileg el tud fordulni abból a pozícióból ahol leállítottam. innentől kezdve máris nem tudom hol van és a pic se. vagy nem tud elfordulni?????mert arra gondoltam hogy teszek egy tárcsát alulra amire egy pici lyukat és simán egy optokapuval oldom meg,, így minden forgási program előtt addig forgatja amíg az optokaputól jelet nem kap ott megtartja és utána indul a forgatás.... Ez azért lenne fontos mert nem csak egy lenne hanem több ilyet szeretnék összehangolni (4-et és akkor már fontos hogy egyszerre induljon egy poicióbol..... mert mondjuk 4 fordulat elcsúszássál forgatom akkor egy fain futó/terelőfény jön ki belőle... Vagy mi a véleményed erről? Baloka esetleg neked?
Nem tudom, vagy az uj W7 vagy a forum motor nem egészen kompatibilis, és nem nyitja linket, igy nem tudom megnézni a képet.
Ha meg akarod álltani és abban a helyzetben tartani, akkor kell némi tartó áram - egyszerü kiprobálni: A névleges áram kb !/10-e körül adj áramot a tekercsre és meglátod mennyire fékez (kézzel probáld forditani). Ha megvan ez, akkor ennyit kell tartoáramnak választani. A meghajtók többségében ez be lehet állitani. De ugy is megoldhatod ahogy leirtad, azaz be kell azonositani a helyzetet majd onnan elforditani a kivánt helyre.
Szia!
Ez lenne a lényege.. Próbálom ide illeszteni a képet Tehát mint ami a fényhidakban van "tükrös villogó". Félek hogy ez a tartó áram csak rövid időn keresztűl kaphatja mert hogy túlmelegszik. Tehát a megoldás az valószínű egy kis optokapu lesz ahogy írtam vagy valamilyen érzékelő ott megtartja rövid időn keresztül a tartóárammal és onnan indul a forgás.. Vezérlőnek nem hiszem hogy fogok külön építeni áramkört hanem valószínű hogy ezzel együtt fogom rendelni. ( szövegként illesztem hogy lásd) http://www.ebay.com/itm/Stepper-Motor-28BYJ-48-With-Drive-Test-Modu...5ebf58 csak ezen szerintem az áramerősséget nem tudom szabályozni ( a tartóáram számára)... Na ezt még meg kell szülnöm: közben már rendeltem is 5 darabot a tesztekhez.
Az ilyen lassu fordulatszámhoz érdemesebb áttételes léptetömotort használni (majdnem ugyanannyiba kerül, mint a sima).
Azt csak eröszakkal lehet elforditani az állásából - igy tartoáram sem nagyon kell. Lehet, hogy ehhez sem kell, ezt meglátod ha kézbe veszed. Ha valaki nem forgatja el magától biztosan nem fog elfordulni. A tartoáromot elvileg bármelyik vezérlövel meg lehet oldani, elég a közös kivezetésbe (rendszerint a plusz) beraksz egy tranyot, ami (részben) zár, ha nem mennek vezérlöimpulzusok a bemenetre. Azaz, ha a motor valahol megáll a tranyo elkezd zárni a tartoáram szintjére. Gondoskodni, kell, hogy az elsö vezérlö impulzus érkezésére azonnal nyisson, hogy a motor a következö állásba tudjon ugorni. Egy kicsit el kell játszani, de nem nagy gond. ill. tanulmányozd át a meghajtó áramkörét, lehet, hogy ez benne is van.
Igen, simán a PIC-ről megy a dolog. Az elmozdulástól nem kell tartani ennél a motornál, mert fogaskerék áttétel van benne, ami elég stabilan megtartja az adott pozícióban. A tartóáram viszont eléggé melegíti.
Mire megírtam a válaszom Massawa kollega megelőzött!
Istenek vagytok!
Igen én is ezen gondolkoztam hogyha áttételes akkor elég nehezen fog tudni elfordulni... Akkor viszont csak simán csak a progit kell megírnom PIC-re, valószínű nem fogok tartóárammal foglalkozni. Már csak az a kérdés, hogy meg tudom e írni úgy a programot hogy bármikor abbahagyja a forgatást akkor 0 szögig forgassa vissza és csak utána kapcsolja le. vagy kell valami pozicionállót adni neki? De sajna a pic programozásba nem nagyon vagyok otthon így ehhez flowcode-lesz szerintem. Sokat segítettetek. Baloka Te mennyivel hajtod? V? A?
Elvileg addig, amig az elektronikát ki nem kapcsolod (és nem forgatod a motort) nem fogsz poziciot veszteni, azaz, ha egyszer igy beállitod, akkor marad minden rendben.
Nem tudom milyen a motor benne, de mondjuk 96 lépéses, akkor, ha egy 96-s számlálot alakitasz ki a PICben, akkor egy-egy ciklus mindig 360 fokban fogja a motort körbeforgatni. Ha tudod milyen benne az áttétel, akkor akár arra is kialakithatsz egy ciklust (mondjuk 1:10 az áttétel, akkor 960 lépés lesz egy fordulat). Ehhez ismerni kellene a felépítését.
Nekem az 5V-os motor megy, de Ampert nem mértem.
Had kérdezzem Te hogy hajtod a motort? Ezen a vezérlőn keresztül? A picbe valami komolyabb progit írtál vagy "simán a 4 tekercsre egymás után adod az áramot, azaz simán a kivezetéseken egymás után sorba jelenik meg a jel? mert nem vagyok benne egészen biztos hogy hogy is fog ez menni? esetleg amíg megjön az enyém nincs talonba egy eladó ilyen szetted?
én úgy gondoltam a vezérlést hogy PORTA0 1 tekercs PORTA1 2 tekercs PORTA" 3 tekercs PORTA3 4 tekercs és ezekre felváltva sorba adom ki a jelet mondjuk 100 milisek szünettel... Vagy ha gyorsabb forgást adok akkor csak 50 milisekkel..
Nem felváltva kell kapcsolgatni a portokat.
Az L297 pdf leírásában megtalálható milyen sorrendben kell kapcsolgatni a tekercseket (portokat) hogy forogjon a léptetőmotor.
Ha tiltom az L297 ENABLE bemenetét, akkor a logikai állást még megőrzi? Tehát ha újra engedélyezem, akkor a motor változatlan pozícióban marad (akkor is a fél-lépésnél állt éppen)?
A nem használt lábaival mit kell tenni (Sense, Vref, Ctrl, INH, stb...)?
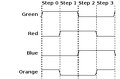
A tekercsekre nem sorosan kell a feszültséget adni. Bitmintával kell léptetni. Melléklet. A minták közti szünet határozza meg a lépésgyorsaságot.
|
Bejelentkezés
Hirdetés |