Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
Ujabb ötlet:
Ha nem ADC-t használok, hanem egy komparátort, akkor talán még jobban is járok. A komparátor a bemeneti feszültségtól függöen (létra leágazás) egy jelsorozatot adna, amit ha integrálok akkor megkapom a bemeneti feszültséget. Azaz megállna a komparatátor. Az impulzusok mennyisége meg megadná, hogy pl. hány lépéssel (esetleg szorozva egy fix értékkel) kell a motornak elfordulnia. A referencia megmaradna, és talán fel tudnám használni a következö álláshoz. (Ha nyomogombok helyett kapcsolok lennének ez müködne is. A nyomogombokhoz még kellene valami, hiszen az csak addig ad jelet míg valaki nyomja, majd a bemenet leesik nullára).
A komparátor csak feszültség szintet figyel > = < ez hogyan ad jelsorozatot , és honnan fogja tudni a motor az irányt ? Az adc azért lenne jó mert egyszerűbb az irány eldöntése és ha (tényleg!)200mv egy létrafok akkor akár +-30mv is lehet a diferencia 170-230 ig egy lépcső 270-330 ig a következő stb +-30mv mv ot már átlagolás nélkül sem lép át a zaj .
A hozzászólás módosítva: Jan 8, 2013
A vezérlést meg a kezelögombot (tanulva a multból) már egy fém dobozba épiteném, egyenesen a kezelöpultba. Innen menne már csak a 4 ér a léptetömotor erölködöjébe (dekodérba), illetve ide csak a táp lenne külsö csatlakozón.
Ugy gondoltam, hogy ha komparator egyik bementére a létra leágazása menne, a másikra meg az integrátor kimenete.
Ha a két bemenet nem egyforma, akkor nyilna egy kapu, ami megadott frekvenciáju impulzusokat engedne az integrátorba, amitöl annak a szintje változna, és addig menne mig el nem érné a létra szintjét. Egy másik kapu döntené el, hogy az impulzusok pozitiv vagy negativ irányban változtatnák az integrátor kimenetét (összegezö vagy kivonó). (Azaz az alaphelyzetben a komparátor 2 bemenete azonos szinten lenne. Ha egy másik létra elágazás lenne kiválasztva az automatikusan egyik vagy másik irányba billentené a komparator kimenetét, és ezzel tudnám kezelni az integrátort (lehet, hogy dupla komparátor kellene), hogy az növelné vagy csökkentené a szintet, majd pedig indulhatnának az impulzusok a kiegyenlitésre. (Egy számlálo meg számlálná öket a vezérlés számára.
Túlspirázod! most még beleteszel egy félmarék logikai ic-t is ? olvasd el az előző hsz emet , írtam még hozzá .
Szerintem jobb a kontrolleres AD integrálás, max-min eldobásos játék, szerintem az időbe bőven beleférsz...
Steve
Eszem ágában sincs, de egy hasonlo feladatot már csináltam az egyik AVR2313-al amiben nincs volt ADC csak komparator, és mégis kaptam egy ADC-t, és müködik.
Na majd még meggondolom, lehet, hogy a 2313-es elég is lesz az egész vezérlésre. A hozzászólás módosítva: Jan 8, 2013
Hello!
Azt nem értem, hogy ha van pld. 24 kétszínű Led egy körben, meg két nyomógomb, akkor addig nyomja a nyomógombot, míg a pozícióra nem áll, aztán mehet a motor utána. Annak helyét is jelezheti a Led. Én így gondoltam a két nyomógombot.. Mivel ha bármi körforgó van, akkor is kell látni hogy hova állítja, Tehát kicsi az sem lehet és nem is célszerű. Milyen egyszerű volt vala a szelszin. Oda tekerted a fokra, az meg a bazi radarantennát odaforgatta ahova kell. üdv! proli007
Pontosan ez a baj. Ök is még szelszinben gondolkodnak. Itt is majdnem ugyanilyen feladatrol van szo.
Egyszerüen, ha bármi mást kell figyelniük (displayt vagy LED-eket), mint a tekerö állását (amihez nagyon kevés idö áll a rendelkezésre, de azt eddig nagy pontossággal és rutinnal mindig odatekerik ahova kell) - vagy talán majd a nyomogombokat, minden más esetben minden 3. - 4. müvelet hibás volt. Olyan megoldásban én is gondolkodok, hogy a kiválaszotott pozicio LED-je felvilágit, majd más szinnel, ha elindul a motor szépen oraszerüen mutatja, hogy éppen hol van a motor és hova megy. De ez csak játék, a kezelönek nem igen van ideje ezt nézni, mert közben mást kell csinálnia. A hozzászólás módosítva: Jan 8, 2013
Amit korábban írtam az nem lehet jó : reed v. Hall elem széles mágnessel ( a mágnest forgatnák valamilyen karos mechanikával, az AD a megbeszéltek szerint ) ?!
Steve
Hmmm...próbálom követni az eseményeket és közben én is agyalok...
 Szóval 24 poziciót kellene elérni egy tekerentyűvel beállítva a pillanatnyi poziciótól jobbra vagy balra. Az optikai egér elvét még nem gondoltad hogy alkalmazd? Egy verzió az elképzelésről (semmi PIC! ) : A forgótányér alapján elhelyezel 2x24 ledet körben két közeli sugár mentén, egyik a pill. pozició, ahol tartózkodik, a másikat pedig egy ilyen opto-egér szaggató tárcsára szerelt "alpha dial" jellegű vég nélkül tekerhető potigomb vezérli. Az opto-egér figyeli hogy jobbra vagy balra tekered, és ezt kiadja két kimeneten. A dolgozó meg látja, hogy a kövezkező forgatás a jelenlegitől jobbra vagy balra szükséges, és teker.Az adó kiadja az elindulás irányát - ez vezérelheti a léptetőmotor elektronikát hogy merre induljon. Ész nélkül elindul , miközben ugyanaz az opto elektronika kiadja az impulzusokat, ami a ledsorodat ellépteti jobbra vagy balra (bi-directional up-down decimal counter) arra a helyre, ahová a dolgozó elléptette. Ha meg azonos pozicióba kjerült a két led, azt már valahogy össze tudod kapuzni, hogy lelője a léptető motort. Hmmm ?  De így utólag gondolva egy led-kör is elég lenne, ha a mechanikus tányérra tennél egy opto-érzékelőt, és amikor oda érne a referencia pont a világító led fölé/alá, akkor állítaná le a léptető motort. A hozzászólás módosítva: Jan 8, 2013
Itt egy kis irodalom a kódkerék fajták működéséről hátha ad valami ötletet.
Igy van most is megoldva a feladat (söt ettöl sokkal egyszerübben).
Egy DC motor egy csigaáttéllel hajtja meg a tányér tengelyét. A nagy fogaskerék 48 fogas, azaz az áttétel 1:48. A csigatengelyen van egy tárcsa egy lyukkal, amit egy optokopler figyel, azaz itt kapsz 48 impulzust 360 fordulatra, vagy kettöt 15 fokra. A vezérlön vagy egy maratott tárcsa, szintén 48 lyukkal (meg egy kattogo arretácioval - 24 pozicoba). Ezt egy másik optikai villa figyeli. Pillanatnyilag nagyon egyszerüen, ha elforditom a vezérlöt az optikai villából kapok annyi impulzust amennyivel el kell fordulnia a korongnak. Ezeket az impulzusokat elrakom egy regiszterbe, majd egy kis késleltetéssel elindul a motor, és a csigatengelyröl kapott impulzusok csökkentik a regiszeter tartalmát. Ha ott 0 van, megáll a motor. (Van benne még egy trükk is, hogy az utolsó impulzusra a 0 elött a motor csökkentett feszültséget kap a azaz a csiga lelassul az utolso fordulatra - 7,5 fokra és szépen megáll). Az indulás nincs kezelve. A forgásirányt mechanikusan oldottam meg egy apro mágnessel meg 2 REED kontaktussal. A mágnest egy csuszokuplung viszi magával a gomb forgása szerint (jobbra vagy balra), és a REED-ek egyike kapcsolja a motor irányát (a mágnes mindössze 1/48 lépést moccan jobbra vagy balra). Ez a konstrukció immár 30 éves, elöször TTL áramkörökkel csináltam meg, majd CMOS-sal. Közben gyakran piszkált dolog, (hogy ha már tudok mikrokontrollert programozni talán jobb volna egy léptetömotorral megoldani ezt a feladatot sokkal profibb modon.  ) ) Most jutottam oda, hogy kellene valami ujat épiteni. Megvettem a motorokat, és most veletek agyalok....  A hozzászólás módosítva: Jan 8, 2013
Frankó ez a kapcsolási rajz, köszönöm szépen.
Ez bipoláris léptetőmotorhoz van, mint látom és az itt szereplő leírás alapján ha jól értelmezem maximum 1 amperrel terhelhető a H hidas IC kimenete. Ez kezdésnek jó ha szerzek egy bipoláris, vagy egy 6 kivezetéses unipoláris motort. Esetleg unipoláris motorhoz vezérlés (olyan amit nem lehet bipolárissá alakítani és pic nélküli) olyan nincs valakinek? Idézet: Oda is rakhatnál egy kis IQ-t és akkor pl. RS232-n jöhetne az állás !?„(A korongról nincs semilyen visszajelzés, azaz csakis a motor állása garantálja, hogy a korong valoban ott van, ahol lennie kell. A szenzorok - voltak ilyenek - nagyon bonyolitják a dolgot, hiszen akkor akár 30 eres kábel is kellene a vezérlés meg a korong közé. (4 a motornak, 24 meg az állásokhoz stb.)” Mi volt egyébként az eredeti megoldással a problémád ( már a mechanikai kialakítással, mert most olvastam az elrendezést ), vagy csak az elektronikai részét akarod modernizálni ? Steve
Az eredeti megoldással, az utolsó CMOS verzioval már sok baj nem volt, azonkivül, hogy nagyon alapszerü.
A mechanikával van néha egy kis gond, mert a csigaáttétel nem a legpreciziosabb kivitel, és ha nem figyelnek oda (szerencsére utánnaállitható), akkor idövel megnövekszik az áttétel játéka, ami a korong szélén akár 1-2 mm-s hibát is okozhat (a korong átméröje majdnem 30 cm). Ez meg egy kicsit sok (1mm belül minden rendben van). Persze a flexibilitása is sokkal kisebb, és néha felmerült az igény, hogy kellene olyan megoldás is, ami nemcsak 24 egyforma szögállást tud. (Ehhez ezt a régi szerkezetet teljesen át kellene konstruálni mechanikai szempontból is.) Ezért gondoltam, hogy megprobálok egy ujat épiteni más, modernebb elveken müködö szerkezetet (esetleg külsö számitogépes vezérlésre is képes), egy kicsivel nagyobb komforttal (pl. a LED-es visszajelzéssel), és talán nagyobb flexibilitással. Ez utobbi miatt választottam ezt a speciális léptetömotort, ami elvben több állást (most nem az állások abszolut számáról van szó, hanem az állások közötti szögkülönbségröl pl. nem egységesen 15 fok lenne az állások közötti különbség, hanem lehetne 10, 12 stb fok is) Továbbra is igyekszek a kapcsolatot a vezérelt motor meg a vezérlöpult között a legegyszerübb szinten tartani (a legkevesebb kábelérrel, mert a kábelhossz lehet akár több 10 méter, és a legegyszerübb formában), mert ez jelentösen gyorsitja a hibaelháritást (ha felmerül) és nem igényel komolyabb szaktudást, hiszen többnyire csak azt kell vizsgálni, hogy az optovillák müködnek és erre hogyan reagál a vezérlö (ebben vannak LED-ek, amik a státuszokat jelzik, villognak ill. a motor vezérlést jelzik), igy gyakorlatilag müszer nélkül és 10 perces betanitással eddig képes volt minden kezelö ellenörizni a berendezés müködését, ill. ha volt hiba, azt pontosan leirni. (Ez fontos, mert gyakran messze vannak tölem a dolgok, így csak telefonon tudok segiteni). Eddig a legtöbb gond a zavarokkal volt ( a TTL-es megoldást ezért is dobtam el) ill. egyszer fordult elö, hogy a motormeghajto tranzisztor szállt el. Minden más mechanikai hiba volt, amit viszont 3-4 csavar utánnaállitásával ill. a LED-ek segitségével helyben rendbe tudták hozni.
Értem. Ebben az esetben a 24 érzékelő nem jó a flex kialakításhoz, akkor inkább az enkóder... Az előbb RS485-öt akartam írni és így beépített IQ esetén a kommunikációt tudnád ellenőrizni, a léptetőmotort tudnád ellenőrizni ( ill. a karbantartók egy kijelző segítségével, amely akár a LEDsor is lehetne!).
Steve
Ezen az oldalon, teljes leírást kapcsolási rajzot, nyáktervet találsz
A hozzászólás módosítva: Jan 9, 2013
Nem találok leírást arról, hogy kell kimérni 4 vezetékes bipoláris léptetőmotor esetén, hogy melyik vezetéket kell a vezérlő A+ A- B+ B- kimeneteire kötni. Sajnos a motorból nem a szokásos piros, kék, zöld, fekete vezeték jön, hanem piros, kék, sárga és fehér.
Azt ki tudom mérni, hogy a piros-kék, ill. sárga-fehér van párban, de saját logikám alapján bekötöttem és csúnyán rángatott az egész.
Az egyik tekercs két kivezetését cseréld meg.
Helló!
Értelmezési kérdésem lenne. A léptető motor tápfeszültségét hogyan kell érteni? Pl. az van írva a motorra, hogy 0,9ohm és 3A Ebből ugye ki tudom számolni a feszt, ami jelen esetben 2,7V Na most akkor ennyi a motor tápja? Vagy csak egy tekercs adata? Unipoláris 2 fázisú motor, 6 kivezetéssel. Ami azt jelenti, hogy két tekercs, középmegcsapolással. Köszönöm! A hozzászólás módosítva: Jan 21, 2013
Hello, az én értelmezésemben egy tekercsen ennyi lehet a maximális áram, amely hatására a fejlődő hő a gyártó által meghatározott környezeti paraméterek mellett még nem okoz károsodást a motor szerkezetében. Ahogy a feszültséget számítod, az sajnos helytelen, mert nem veszed számításba a frekvenciát. Az induktivitás nagy, így az alacsony frekvencia mellett sem alakul már ki a tekercsen nagy áram, ami létrehozná a kívánt nyomatékot sok esetben. Ezért ezt a csökkenő áramot a feszültséggel erőltetjük, így a sokszorosa kell annak a feszültségnek, amit te számoltál. Ezért nem értelmezhető egy léptetőmotor tápfeszültsége.
Amennyiért megveszed az SLA ic kész meghatót veszel.
guliver83:
Azon gondolkoztam, hogy L297+L298 párost is alkalmazhatnék, akkor viszont a bipoláris motorok bizony jók lennének. Böngésztem az adatlapokat, és az áram beállítás nem teljesen világos. Az adatlapon az RS1 és RS2 értéke 0.5R, az fix, és a Vref referencia bemenetre adott feszültséggel tudom a motor áramot beállítani. Eddig világos. De az adatlapon semmi formulát, számítást nem találtam, hogy mégis hány volt legyen ez a referencia feszültség? Persze tudom, hogy adott motorhaz kell beállítani, csak a határok, meg a számítás hiányzik. Itt akadtam el. Találkoztatok hasonló problémával?
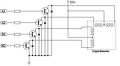
A neten böngészve egy kapcsoláson ráakadtam némi infóra a referencia feszültséggel és motor áram beállításával kapcsolatban. (melléklet)
A rajzon ezt írja a Vref poti mellett: Icoil = Vref / 0,56 ahol Icoil a tekercs áram (esetünkben pl.: 2A), a Vref ismeretlen és a 0,56 az pedig az Rs (adatlapon Sense1 és Sense2) motor áram beállító ellenállások. Ebből kifejezzük a Vref-et akkor: Vref = Icoil x 0,56 -- Tehát 2A x 0,56 = 1,12V Elméletileg a potival ennyi referenciát kell állítani ahhoz, hogy 2A-nál korlátozzon (chopper) az IC. Ez így helyes? A hozzászólás módosítva: Jan 24, 2013
Sziasztok!
Nem régóta foglalkozom elektronikával, ezért elnézést ha nagy hülyeséget írok. 6 eres unipoláris léptetőmotorokat szeretnék vezérelni, ezek 1,8 fokos lépésszögű 5v-ról üzemelnek 2,6 ohmosak tekercsenként. Mivel az áramerősség jelentősen meghaladja a fél ampert így a hestorban kapható darlington arrayeket nem tudom használni. Ti msp430-al szeretném használni, aminek 3,3V-osak a kimenetei. Úgy terveztem hogy építek magamnak tranzisztorokból erősítőt minden tekercshez. Ugye a bázisra kötném az msp430 kimenetét, az emitterre az 5v-ot, a kollektorra a tekercs erét. Ez így megfelelő?Mi az előnye a mosfetnek és mi a darlington tranzisztorpárnak? Ha PC tápból szeretném nyerni az 5v-ot az megoldható úgy hogy csak simán a táp 5v-os kimenetéről leszedem az áramot? Mitől kapcsol be a táp hűtése? Végül: Milyen tranzisztort használjak, nagyon el vagyok kavarodva +1 megoldható az egész úgy, hogyha 5v-os kimenetű mikrokontrollert használok azzal is működjön? Köszönöm a segítséget! V
Tegnap/ma kipróbáltam a bipoláris motorokat. Nagyon jók. Viszont azt tapasztalom, hogy ha külső oszcillátorról járatom, akkor szép sima a futása, ha viszont az LPT-ről hajtom meg, akkor ha megfogom, kézzel érződik egyfajta "kattogás" a futása közben. Ahhoz tudnám leginkább hasonlítani, mintha ütne valamilyen egy tengely. Ez fordulat függvényében változik. A magasabb fordulaton sűrű, az alacsonyabb felé egyre ritkább ez a jelenség.
A másik pedig ha megáll a motor, akkor a tartóáram miatt sípol, visít, sistereg a motor. Ezt ki lehet küszöbölni valahogy? Természetesen ha az Enabléval kikapcsolom a vezérlőt, akkor megszűnik a tartóáram, és vele a sistergés is. Viszont a mach3 munka közben tartóáramon hagyja a motort, így sistereg, visít, sípol. Táp 12-24V. Motor áram 1.8-2A. Egyenlőre ez a tapasztalat. Esetleg hasonló probléma? Köszi! A hozzászólás módosítva: Feb 5, 2013
Én olyat tapasztaltam, hogy DOS alatt LPT-ről hajtva a motorokat, egyenletesen járnak, ám ha Win alól megy, akkor egyenetlenül jár, mert az impulzusok a változó processzor időszeletek miatt nem egyformák. Lehet, hogy te is ezt tapasztalod.
A tartás alatti sípolást a meghajtó "órajelének" változtatásával lehetne eltolni az emberi érzékelés tartományából, vagy ha kiegészíted egy olyan áramkörrel, ami ha nem jönnek léptető impulzusok, akkor egy bizonyos idő után leveszi a tartóáramot mondjuk a harmadára. Ez csak egy monoflop, ami kisöntöli, elállítja a refrenciát. |
Bejelentkezés
Hirdetés |