Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
Semmi más nem kell csak egy táp meg a pc-d és ez a kártya. Ez már védi a gépedet a visszajövő feszültségektől, és 3 motort is vezérelhetsz vele egyszerre, és az irányváltás is megoldott.
Köszönöm mindenkinek a segítséget. megrendelem ezt a meghajtót, szerintem még össze is tudom rakni. Aztán meglátjuk sikerül-e

Sziasztok!
Elektronika terén nagyon kezdő vagyok, és a legfőbb bajom a témában az, hogy sokszor olvasok megoldásokat, amik kinyilvánítják, hogy ezt vagy azt így kell megoldani, de nem mennek bele a miértekbe, és azokba a kérdésekbe, hogy miért NEM jó egy egész egyszerűnek látszó módszer. Például egy nagyon primitív motorvezérlést szeretnék megvalósítani, konkrétan egy printerből kitermelt unipoláris léptetőét. Tudom, hogy vannak erre motorvezérlő IC -k, de az a kérdésem, miért nem jó az, ha simán egy darlington array -jel hajtom meg a tekercseket? Miért emelik ki mindig a motorvezérlő IC -k leírásai, hogy ellenáll az induktív terheléseknek? Ez azt jelenti, hogy dióda védi a tekercsből visszarúgó áramtól az IC -t? A darlingtont szétcsapja majd? Jelenthet veszélyt a mikrokontrollerre, ha így hajtom meg? (Arduino).
Mikrokontroller kimeneteit illik védeni.
Ha nagyon elakarod választani akkor optocsatolón keresztül hajtod meg. Külön táp a uC-nek és külön táp a motornak. Ezzel galvanikusan is levásztottad. A stepper motorvezérlő IC-k nem csak teljesítményt tudnak hanem jobb esetben már logikával is el vannak látva. STEP DIR vezérlő pontjaik is vannak. Ekkor elég megmondani az DIR direction irány portjának előre/hátra menjen (L/H). STEP lépés arra pedig kikell küldeni a megfelelő számú négyszög impulzust amennyit szeretnél mozdítani. Miért jó ez? Mert 2 kimeneti porttal tudod vezérelni a motort. Ha maga a uC direkt tenné akkor fázis tekercseinek megfelelő számú portot kellene beáldozni erre a célra. Arduinot emlegeted annak se van sok I/O portja. Ha éppen csak stepper vezérlés tanulása a cél akkor áldozzál fel több portot is az Ardunión. De ha több funkciós eszközt építesz akkor lehet éppen hiányzik még 1 vagy 2 I/O port. A step/dir-driver eszközökkel portot takarithatsz meg. LENZ bácsi felfedezése előtt is tudta a fizikát a tekercs és a benne folyó áram.Igen ott áram megszakításakor indukálódik nagy feszültség.Azt meg nem szeretik a félvezetők ezért átütnek. Ezért kell a védő dióda. Jobb esetben magában a darlington array-ben is benne van már de ha nincs mellé kell rakni kívülről fázisonként 1-1 diódát záróirányba.
A probléma megoldását először is kezdd a léptetők lelki világának a megismerésével, utána rájössz a miértjére is!
Üdv! Van 2 db Léptető motorom, mindkettőn 6 vezeték található ! Egyenlőre szükségem lenne egy kapcsolásra ami ezeket meghajtsa és tudjam állítani a sebességet és az irányát! Akinek van ötlete esetleg kapcs rajza kérem ossza meg velem!
Üdv:Levente
Sziasztok!
Egy nagyon erdekes kerdesre keresek valaszt. Van egy felig automatizalt himzesre kifejlesztett varrogepem, amin talalhato 3 encoderes leptetomotor. A gep X es Y tengelyen kepes mozgatni az asztalt, mig a 3 ik motor az anyag behuzasara van kitallava. En az anyagot 3-5mm es oltesekkel varrom. A problemam az hogy a gep korigal. Tehat ha vhol kihagy egy oltest akkor azt a gep eszre veszi es a kovetkezonel korigalja, igy megtortenhet az hogy nagyobb oltesek jelennek meg mint az kivant hosszusag. Ez ugy van megoldva hogy a gep a control unitbol kikuld egy impulzust az encoderes leptetomotor fele, mig a motor is kuld egy impulzust a CU fele, majd ezt softosan osszehasonlitja a gep. Ha a ket impulzus megegyezik a gep nem korigal hisz nem eszlelt hibat, ha elterest eszlel akkor a kovetkezo oltest mar hosszabra csinalja. Nekem az lenne a fontos hogy tartsa a gep a kivant oltes hosszusagot es valami elektronikai megoldassal becsapni a gep softjat. Ugyanazt az impluzust kellene eloalitani a motortol mint amit kikuld a CU es igy a gep nem latna kulonbseget. Szoval azt szeretnem toletek kerdezni, hogy van valakinek otlete hogy hogyan tudnam atverni a gepet? Egy elmeletet keresek egy jo otletet! Kerlek ha valakinek barmilyen otlete van irja meg nekem, nagyon sokat segitene. Elore is koszonok minden hozzaszolast!
Két kiindulási alapot látok:
- lehetséges lépésvesztés, azaz hiba: akkor mit fog csinálni a gép? Kihagy egy öltést, vagy ugyanazon a helyen fog ölteni még egyet? Ha ez gond, akkor gondban vagy... Ezt ki kéne küszöbölni. - nincs lépésvesztés, azaz hiba: ekkor felesleges az enkóderes megfigyelés. Ezt vagy kikapcsolod, már ha lehetséges (írásod alapján nem.) Vagy becsapod, és egy hurkot hozol létre benne. Ezáltal a kiadott jelet vissza is tudnád küldeni önmagának egyből, vagy valami optón keresztül. Meg kell nézni, hogy mit ad ki, és mit kap vissza.
Eloszor is koszonom a valaszod.
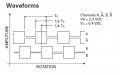
A hibat mindig a kovetkezonel korigalja. Tehat tegyuk fel hogy 3mm es oltessel varrok, egy darabig tartja a 3mm-t aztan jon egy lepesvesztes es a kovetkezo oltes mar 4 mm es lesz. Ugyhogy a becsapas lenne a megoldas, de az encoderes megfigyelest nem lehet kikapcsolni. Kerlek pontositanad a hurok elkepzelesedet! Az encoder a csatolt kepen lathato jelet kuldi ki. Hogy mit kap vissza azt sajnos nem tudom mert nincs olyan scope om ami tud differencial merni csak a testhez kepest. Az amplitudo kulonbsegre esetleg van vmi otleted? Varom valaszod! Elore is koszi
Kedves hozzáértők...
Bipoláris-5V-os motort szeretnék vezérelni PIC-el... (Kis floppy meghajtóból kiszerelt fejmozgató motor) A program nem gond... de a kapcsolással kapcsolatban találtam sok megoldást, és tapasztalatlanságomban inkább kérdezek Szerintetek a legegyszerűbb megoldás a FET-es - diódás vagy mindenképpen használjak motorvezérlő L293 -at?
Ahogy én csinálnám. Ha mindenféleképp mikrovezérlőt akarsz, akkor csak a step dir jelet küldeném róla. És csinálnák két hidat valami kisáramú filléres tranzisztorokból, mivel ennek a motornak nincs nagy fogyasztása. PL itt van amit én használtam nyomtatóbol kiszedett motrokhoz. Elektronika --> 08. stepp motor vezerlok alatt .Link
Sziasztok
Egy technikai jellegű kérdésem volna: Egy SIG Positec VRDM 564/50 LNA típusú léptetőmotornak az adatlapját keresem, de ezidáig eredménytelenül. Ha valaki tudna ötletet adni, hogy hol találhatok ilyet, az nagyon jó volna. Elképzelhető, hogy valaki fejből is tudja azt, hogy "hány" fázisú motorról van szó. A motorból 10 kábel jön ki. Kézi vezérlőről üzemel, de szeretném soros portról meghajtani és a működésének ismerete elengedhetetlen volna. A kézi vezérlőből motoronként két kábel megy a motorvezérlőbe (+ a táp) és tulajdonképpen az érdekel, milyen adatokat, és hogyan küld a kézi vezérlő a motorvezérlőnek. Csak remélni merem, hogy érthetően sikerült leírnom a problémát. Köszönöm, hogy foglalkoztál vele! Kép mellékelve.
Sziasztok
Egy technikai jellegű kérdésem volna: Egy SIG Positec VRDM 564/50 LNA típusú léptetőmotornak az adatlapját keresem, de ezidáig eredménytelenül. Ha valaki tudna ötletet adni, hogy hol találhatok ilyet, az nagyon jó volna. Elképzelhető, hogy valaki fejből is tudja azt, hogy "hány" fázisú motorról van szó. A motorból 10 kábel jön ki. Kézi vezérlőről üzemel, de szeretném soros portról meghajtani és a működésének ismerete elengedhetetlen. A kézi vezérlőből motoronként két kábel megy a motorvezérlőbe (+ a táp) és tulajdonképpen az érdekel, milyen adatokat, és hogyan küld a kézi vezérlő a motorvezérlőnek. Csak remélni merem, hogy érthetően sikerült leírnom a problémát. Köszönöm, hogy foglalkoztál vele! Mellékeltem képet.
Üdv!
Lenne egy 23LC064-025-8W-xx.xx-1.5 típusú motorom és van mellé egy MSDD-40-3.2 digitális verziójú meghajtó. Az lenne a kérdésem,hogy megoldható lenne e ezekkel valamilyen egyszerű nyomógombos vezérléssel+végálláskapcsolókkal az irányváltás?Gyakorlatilag kp 30-40cm-es fogasléc oda-vissza járatását kellene valahogyan megoldani.
Sziasztok.
Épp ismerkedek ezekkel a léptetőmotorokkal. Suliban anno robottechnikán hallottam bizonyos tulajdonságairól, és eléggé érdekesnek tűnik. Utánanéztem a neten hogy pontosan, hogy működik. Ezt szerencsére megértettem a vezérlési elvet úgyszintén legalábbis unipoláris motoroknál. Azt szeretném megkérdezni hogy egy olyan vezérlőáramkört szeretnék építeni, amely nem igényel számítógépes környezetet, se PIC-et, mert egyáltalán nem számítógépes környezetben tervezem a léptetőmotort használni. Ha nincsen, akkor ötleteket kérnék hogy lehetne a képen látható teljesítményerősítő fokozathoz kapcsolni egy olyan vezérlőt, mely vagy akár egész, vagy akár félléptetést meg tud valósítani valami IC-vel vagy ilyesmivel.
Köszi a segítséget, de ahogy én elnézem ez az áramkör bipoláris léptetőmotorokhoz jó.
Olvass csak ´tovább, mert csak pillanatok kérdése a motort átalakitani, vagy másképpen meghajtani....
Üdv mindenkinek!
Régebbi - főleg hobbi cnc oldalakon látni olyan stepdir vezérlőt amin valami 40 lábú pic van , optocsatolókkal leválasztva az lpt-ről, 12 darab fettel . Hobbi cnc oldalon a rajz fent van de a pic hexe kellene , valakinek esetleg megvan?
A h1 vezérlö hex-re én is igényt tartanék de arra az esély hogy valaki odaadja 0.

e ngem a profi1 vezérlő is érdekel, ott még nincs benne a motor körben ellenállás, viszont azthiszem tud mikrostepet is.
sziasztok *
* A felületen tilos az üzleti tevékenység!
Átjöttünk a Flowcode témából, mert ez már léptetőmotoros téma.
A kérdésem tehát, hogy jól értem-e: Az L298 hajtásához nem kell az L297, csak a uC kimenete. Az L298 két motor független vezérlésére alkalmas. A tápellátásához a 36 V feltétlenül szükséges, vagy az a max., amit ki tud vezérelni a kimeneteire?
A 36v az a plafon,és nem feltétlen szükséges az l297,és 2 szervot tud vezérelni vagy 1 léptecset.
Az l298 igazábol léptetömotorra az igazi ha pedig servot szeretnél vezérelni válaszd az l292 az pedig arra valo.
Szia!
Köszi az infót!  Léptető motorhoz szeretném használni a vezérlőt. A programot már megírtam a Flowcode-ban, de ott a léptető motorhoz mindössze 4 portot állít be a uC-be, akár bipoláris, akár unipoláris a motor. Ezért nem jó hozzá a H-hidas vezérlés (mert ahhoz 8 vezérlő kimenet kellene), ezért kerestem ilyen vezérlőt. Léptető motorhoz szeretném használni a vezérlőt. A programot már megírtam a Flowcode-ban, de ott a léptető motorhoz mindössze 4 portot állít be a uC-be, akár bipoláris, akár unipoláris a motor. Ezért nem jó hozzá a H-hidas vezérlés (mert ahhoz 8 vezérlő kimenet kellene), ezért kerestem ilyen vezérlőt.
Még egy kérdés: A Sense 1 és 2 milyen célt szolgál?
Oda a söntök valoak azokkal állitod be az áramkorlátot nézd meg az adatlapját.
Nem üzletileg érdekel , kapcsolástechnikailag.
Azóta meglett, egy spec ic-t használt a vezérlő, az tudott 16szoros mikrosteppet. De továbbra is érdekel , olyan doksi kellene (pic v atmegával) ami l298-at tud -mikrosteppel- vezérelni lpt portról step-dir módon. Nem megvenni akarom - az csak pénz kérdése- hanem kipróbálni saját hobbi céllal. Azért ezzel , mert ez van a fiókban. |
Bejelentkezés
Hirdetés |