Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
Nekem nem működik, nincs ilyenem. Nem is vennék, építenék.
Csak tippeltem. A poti három lábát kövesd végig, hova vannak kötve. A középső, ha minden igaz, megy a mikrokontrollerbe.
12v sok volt neki.
Szóval egy kamera slider kellene nekem. Mechanikai cuccok már megvannak. A linken látható ötlet a "forrás". https://youtu.be/2xG3Ls4m5AI Alábbi linken pedig a fotók, motorokról és a amit én rendeltem vezérlő. (azért ezt a vezérlőt rendeltem mert erre tudok tenni 2 végállást a sin végére, és nem távvezérlős, potival lehetne sebességet állitani). https://www.dropbox.com/sh/jv3s8zs5eywsqfg/AAC2iNPU_xj3tlINEN-k0W_na?dl=0 Ugye ez a vezérlő 5-12v os, 4 eres motorhoz való. Mind 2 motor 6 eres. A 4 ér ok, megvan. 12v táppal gyakorlatilag a motor fullon forog, potiaval nem lehet a fordulatot állitan. Vagy fullon megy vagy megáll. 5v táppal már jobb a helyzet, potira reagál, sebességet is lehet állitani. Nyomógombokkal léptet, iránytvált, stb. Viszont itt a problémám. A poti állitása közben, egy bizonyos ponton, szépen csendben forog a moci, itt szinte a legnagyobb a sebessége. Lassabbra állitva is forog, viszont nagyon búg, berezonál a motor. ( Ennél az egész rendszernél pont az lenne a lényeg hogy a lehető leglassabban mennyen a "kocsi".) Szóval működik ahogy kell, csak ez a rezonancia, búgás a probléma. Szerintem ezt az 1m es sinre is át fogja vinni. Szerintetek? Más tipusú motor kellene, vagy vezérlő? Köszi
A léptetőmotorok már csak ilyenek. Más típusú vezérlővel csökkenthető a rezonancia (mikrolépések) de a léptetőmotorok sajátossága a dolog. Egy DC motor sokkal kevesebb rezgést kelt. Csinálsz/veszel neki egy megfelelő áttételt és mehet is a dolog.
A léptetőmotornak megvan az az előnye, hogy a fordulatszám tetszőleges mértékig csökkenthető. Idézet: Ez teljesen igaz ! Az elsö cnc-m tb6560 as motormeghajtókkal szinte elviselhetetlen "hangzavart" sivítást produkált , a mostani gépem az MA 860 as digitális meghajtókkal hangtalanul rezonanciamentesen dolgozik . „Más típusú vezérlővel csökkenthető a rezonancia (mikrolépések)”
Jobban jársz ha rendelsz rendes motormeghajtót és azt megvezérled egy mikroprocival . Ezek a panelok maximum játékra jók , messze állnak egy jó steppermeghajtótól .. Ahogy látom a panelt az két hidas meghajtó ic vel mozgatja a steppert kb annyit ér mint a halottnak a cvikipuszi.
A hozzászólás módosítva: Dec 27, 2020
Ha nem tudsz mikrovezérlőt programozni akkor még egy A4988 vagy hasonló meghajtó mikrolépéssel és egy 555 alapú jelgenerátorral is megoldható.
Sziasztok,
Adott egy Berger Lahr SIG Positec WDP3-014.0801, EPROM 470.00, REV.2.001 típusú motorvezérlő, amelynek a tartalmát szeretném kiolvasni. Tud valaki segíteni bármilyen információval e téren? Szükségem lenne még a hozzá tartozó OED3 vagy ProOED3 szoftverre is. Köszönöm!
Üdv Mindenkinek!
Segítséget kérek. Van egy 5 fázisú léptetőmotorom (VEXTA PH596H-A-A9, 5 fázis, 0.72°/lépés, DC 2.7A, 0.43Ohm). A motor hajtása 3db L6506 + 5db L6203 kettőssel valósulna meg, amelyek rendelkezésemre állnak. Ezek vezérléséhez kérek segítséget. Ha lehetséges, akkor nem PIC-kel, mert sajnos a programozáshoz nem értek. Teljes lépésben, fordulatszám- és irányváltoztatással szeretném a vezérléssel a motort üzemeltetni. Minden segítséget köszönettel fogadok.
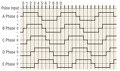
Fel kellene rajzolnod a tényleges vezérlő jeleket az "5 fázisú léptető motor vezérlési diagram" képen látható jelek alapján. Az egyes fázisokhoz kettő vezérlő jel fog tartozni, amik közül az egyik a rajzod szerint pozitív, a másik a negatív áramot engedélyezi, ezeket kell az L6506-ok bemenetire kötni. Ha lerajzolod, látni fogod, hogy milyen szekvenciájú 10 vezérlő jeleket kell előállítani.
Ha nem lehet processzor, akkor a következőképpen próbálnám: -Egy állítható frekvenciájú oszcillátor kellene, ami a sebességet fogja megszabni. Ha 5V-os lesz a rendszer, a 74HC4046 VCO-ja is jó lehet. Ez esetben egy feszültséggel (potenciométerrel) tudod változtatni a frekvenciát. -Ez után egy 10-es előre/hátra számláló kellene. Az irány kiválasztásával választod ki a forgásirányt. Egy 74HC190-es jó lehet. -A BCD számot egy-egy állapothoz rendelném egy dekóderrel, pl a 74HC42-vel. -Az egyes állapotokkal pedig egy diódás mátrixszal a hozzá tartozó vezérlési állapotot egy meghajtóra kapcsolnám, aminek 10 csatornájúnak kell lennie. Ez a meghajtó lehet 2db 74HC14-es is, de lehet hogy egyszerűbb a nyáktervezés 2db oktál meghatóval. Biztos hogy vannak szellemesebb megoldások is.
Köszönöm a válaszod. A processzor programozásához nem értek. Már vannak elképzelések a megoldásra, de a javaslatodat is kipróbálom. Az L6506 16. és 17. lábán az ellenállás osztók értékét mennyire kell beállítani? Áramérzékelőnek 0.47 Ohmot használok, az áramfelvétel 2.5A. Akkor az osztót kb. 1.1V-ra állítsam? A próbákra úgy is kisebb árammal ellenőrzöm a működést.
Az adatlap alapján Vref=Rsense*Ipeak=0,47*2,5=1,175V, azaz a kb. 1,1V jött ki nekem is. Mondjuk ha nagy lenne az áramhullámosság (alacsonyra állítod az oszcillátor frekvenciáját), akkor az áramközépérték érdemben kisebb lehet az elvártnál, hiszen ez az áram csúcs értékét fogja megszabni.
Ahogy múltkor írtam, az egyes vezérlő lábak időfüggvényét kellene felrajzolnod elsőre. Ha igazán korrekt megoldást szeretnél, akkor az úgy nevezett "slow decay" és "fast decay" áramváltozásokat felváltva kellene használnod, ahogy ennek a dokumentációnak a 16-os ábráján láthatod. Ehhez viszont másképpen kellene összekötnöd az L6506-t és az L6203-t, mint ahogy az L6506+L6203 ábrán szerepel, és 10 helyett 15 vezérlő jelet kellene előállítanod. A hozzászólás módosítva: Ápr 22, 2021
Léptetőmotor hasznosítás bontott nyomtatókból
Az érdekelne ki milyen könnyen adaptálható megoldást tudna ajánlani különféle HP nyomtatók bontásából származó léptető motoros mechanikák és vezérlők olyatén hasznosítására, hogy ne kelljen túlzott fejlesztésbe fogni, hasznosítható legyen a működő képes mechanika, vezérlő, helyzet visszajelző kódtárcsa, stb. A kívánatos maximális cél: uaz, mint egy antenna-forgató, visszajelző, vagy pl: egy régi szelszin esetén. A minimális cél: balra-jobbra gombnyomásokra működjön a motor, visszajelzés potméterrel LED-sorral
Léptető motor és potméteres analóg visszajelzés ?!
Hááát eléggé fura opció , mikor pár fokos(az alatti) lépéssel indulnak a léptető motorok és potis/ledsoros vissza jelző mutatná a helyzetet. Ekkor felmerül bennem a kérdés , hogy egyáltalán kell-e ilyen durva poziciókhoz a léptető motor preciziós lépés köze ? Azt se tudjuk mekkora terhet kell mozgatnia ? A hozzászólás módosítva: Jún 30, 2021
Idézet: „visszajelzés potméterrel LED-sorral” Ezt nem teljesen értem. Milyen egy potméteres visszajelzés?
Idézet: „Milyen egy potméteres visszajelzés?” Poti tengelyét forgatja a motor avagy a forduló tárgy. A leosztott feszültséggel arányos az elfordulás mértéke.
De ha én adom a vezérlő jelet a léptető motornak, akkor tudom, hol áll.
Feleslegesnek gondolnám mechanikusan is mérni, főleg ilyen pontatlanul is a pozíciót. Idézet: Ha a kódtárcsát benne hagyod az figyelheti a mechanika helyzetét,maximum olyan program kell ami minden indításnál kimegy az egyik végállásra - vagy mindkettőre és onnan már akár 1/100 mm pontos is lehet . „vezérlő, helyzet visszajelző kódtárcsa, stb.” A hozzászólás módosítva: Jún 30, 2021
Ha a tengelyen van poti, akkor bekapcsoláskor azonnal lehet tudni hol áll a motor, nem kell kalibrálni bekapcsoláskor. Antenna forgatásnál ±1° általában az elmegy kategóriába esik. Ha nem, akkor bekapcsoláskor valahogyan kalibrálni kell, ahhoz viszont elég egy valamilyen végálláskapcsoló.
Ugye, ahogy írod: opció.
Tehát lehet a maximálisat is kihozni, de már a minimális is elmegy. A maximális, hogy megy oda a motor ahova akarjuk állítani, pl: 42° -ra +/-1° még megfelel, a visszajelzés meg akár °-ban a nyomtató valamikori LCD kijelzőjén, van végállás, megszorulás-védelem, stb, de már az is jó, ha gombnyomásra föl és letekerhetjük. A kijelzésben meg azért jó a LED -sor is (mint minimális igény), mert egyszerű a megvalósítása a jeladó potmétert forgatni tudja a bontott mechanika, kijelzési értékben meg a szabályozás a gyakorlatban kb a 360° 1/4 -ére fog korlátozódni, tehát igen jó felbontás lesz így is. Egyébként egy szelepet kell tekergetni, amihez a nyomtató motor teljesítménye, kb egy nagyságrenddel több, a szükségesnél, ráadásul a fordulatszám akár 1/20 -ára is csökkenthető áttétellel. Nem kell gyorsan és gyakran sem állítani. A fő szempont: a meglévő bontott cuccok adaptálásával legyen megoldható, nem időigényes fejlesztéssel
Ha én adom a vezérlő jelet a léptető motornak, akkor tudom, hol - kell állnia. De tényleg ott áll?
Egy másik épületben lesz, mint ahonnan kezelni kell és fontos tudni, nem lépett-e föl hiba, pl: megszorulás, ékszíj szakadás, stb Idézet: „Egy másik épületben lesz,” Nagy távolságra mivel viszel át zavar mentesen, leosztott feszültséget az ellenállás pozíciójával, egyszerűen ? A hosszú kábeled antenna lesz, minden féle zavart össze fog szedni. TIPP: Ha megelégszel viszonylag kevés pozícióval akkor , akkor tegyél fel mechanikus visszajelzőt. A szelep tengelyére egy tárcsát ami reed / hall / eszközökkel egy mágnes pozícióját mutatják. Esetleg egy nyáklemez korong amikbe vezető körcikkeket marsz. Azok felett egy közös érintkező forog. A körcikkek számának fele+1 darab vezetékkel és minden körcikkre kötött diódával (polaritását váltakozatva) és túl oldali ledsorral mechanikus visszajelzést tudsz csinálni. A diódás ledes áramkört váltó feszültséggel (3-5 V) táplálva , vezetékeket megfelezni. A hozzászólás módosítva: Júl 1, 2021
Idézet: A/D konvertálás, digtális jeltovábbítás stb. „Nagy távolságra mivel viszel át zavar mentesen, leosztott feszültséget az ellenállás pozíciójával, egyszerűen ?”
Igen ez egyértelmű ... csak a kérdés indításában minél egyszerűbb megoldást kértek.
(Kinek mi az egyszerűbb ?!  ) ) A hozzászólás módosítva: Júl 1, 2021
Idézet: „ahonnan kezelni kell és fontos tudni, nem lépett-e föl hiba, pl: megszorulás, ékszíj szakadás, stb” A feltételezett hiba lehetőségeket jelző / részben elhárító mechanikus / elektromos / szoftveres megoldásokat kell beépíteni. Teljesítmény változások értékelés (megszorulás, ékszíj szakadás). végállapotok vissza jelzése kapcsolókkal (mechanikus / hall elem).
Kedves Kera_Will!
Teljes félreértés a dolog. A kérdés felvetés a meglévő bontott HP nyomtatóalkatrészek újrafelhasználására irányult, nem a potméterrel leosztott feszültség mérésének zavarérzékenységére. .....> Egy másik épületben lesz A két épület külső falsíkja között 1,5 m a távolság, de gyalog, főleg télen, éjszaka, körbemenni kényelmetlen. Építéskor a földbe le lett fektetve: 5x2,5 MBA kiskábel 4x2,5 MBA kiskábel 3x1 Cu sodrott QV 10x4x0,75 postai árnyékoló köpenyes földkábel RG6/U koax A melléképület és főépület közötti effektív kábelhosszak 20 m alatt vannak Ezek egy része jelenleg is üzemel. Megvan az LM3914 -el épített LED soros kijelző, ami akár bővíthető is kétszeres, vagy háromszoros felbontásra - de a kérdés nem ez, hanem a: - miként hasznosíthatnánk a bontott HP nyomtató alkatrészeket?
Sziasztok!
Van egy teljesen elvetemült ötletem. Szerintetek DC stepper motorral egy 30cm hosszú, 3-4cm-es átmérőjű csigát meg lehetne forgatni? Gyakorlatilag egy kolbásztöltő szerűséget szeretnék, de nem akarom villanymotorral több okból is: - 12V-ról akarom hajtani. - Szabályozni akarom teljes mértékben a "kinyomott" mennyiséget. Valamiért én stepper motorban látom a megoldást, csak kérdés hogy hány nm-es kellhet ehhez, egyáltalán létezik-e ilyen erős ekkora feszültségű DC stepper  A hozzászólás módosítva: Dec 14, 2021
Ha nem is létezik, lehet a motor és a csiga közé hajtóművet rakni.
szerk.: A szükséges forgatónyomatékot pedig le lehet mérni. A hozzászólás módosítva: Dec 14, 2021
CNC-s topicban előkerülnek izmosabb stepperek is ... ott lehet több típust is emlegetnek ezekből.
|
Bejelentkezés
Hirdetés |