Fórum témák
» Több friss téma |
Cikkek » MMA7260QT gyorsulásmérő használata AVR-rel MMA7260QT gyorsulásmérő használata AVR-rel
Szerző: Fizikus, idő: Szept 21, 2010, Olvasva: 26096, Oldal olvasási idő: kb. 2 perc
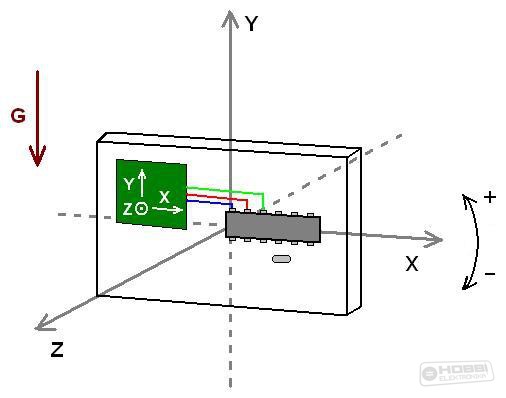
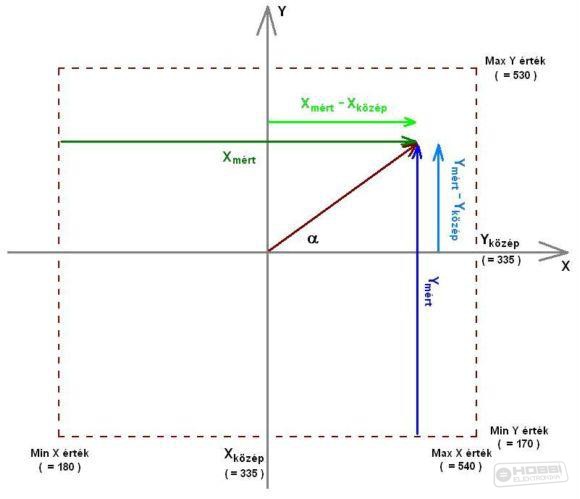
Ha egy tárgy dőlésszögét egy adott tengely irányában meg akarjuk határozni, akkor nincs mese, elő kell venni a középiskolás négyjegyű függvénytáblázatot, és fel kell eleveníteni a trigonometrikus függvényekről tanultakat (LINK). Ha csak lassan változó mozgásokat vizsgálunk (pl. egy tárgy dőlésszögének vizsgálata ilyen), akkor a gyorsulásmérő a G gravitációs gyorsulás X, Y és Z tengely irányú komponensét méri. Ezekből az értékekből kell a dőlésszöget meghatározni. Nézzük meg, ez hogyan lehetséges 1 tengely mentén! A gyorsulásmérőt az alábbi ábrán látható függőleges elrendezésben fogom használni:
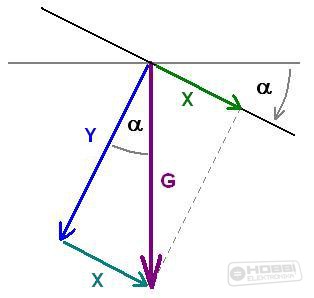
Ekkor egy negatív irányú, alfa szögű dőlésszög esetén a G gravitációs gyorsulás X és Y tengely irányú komponensét az alábbi ábra mutatja:
A szenzor az Y és a Z irányú gyorsulást méri. Ahhoz, hogy ezekből a mért értékekből a különböző irányok mentén tapasztalható dőlésszöget megkapjuk, egy-két trigonometriai számítást kell elvégeznünk.
Tehát a mért értékekből az arkusz tangens függvénnyel tudjuk kiszámolni a dőlésszöget. De van egy kis probléma, a tangens függvény nincs értelmezve azoknál a szögeknél (pl. +/- 90o), amelyeknél a koszinusz függvény értéke nulla (nulla értéknél nincs értelmezve az osztás művelete). Egyes szögeknél pedig a szinusz és koszinusz függvények értéke negatív, ezért pl. +45o és a -135o (+225o) tangense is ugyanaz az érték. Ahhoz hogy a helyes dőlésszögértékeket kiszámoljuk, figyelembe kell venni az adott szöghöz tartozó szinusz és koszinusz függvények előjelét is. Ez csak tovább bonyolítja a dolgokat, de szerencsére a Processing tartalmaz egy ún. atan2(y,x) függvényt. Ez a függvény kiszámolja a paraméterként megadott (x,y) koordinátákból a koordináta rendszer középpontjába mutató irányvektor dőlésszögét, és azt is figyelembe veszi, hogy x és y értéke negatív bizonyos dőlésszögek esetén.
Ennek a függvénynek a használatával nagymértékben leegyszerűsödik a dolgunk, mert a fenti ábrán feltüntetett módon, a mért értékekből kiszámolható a dőlésszög.
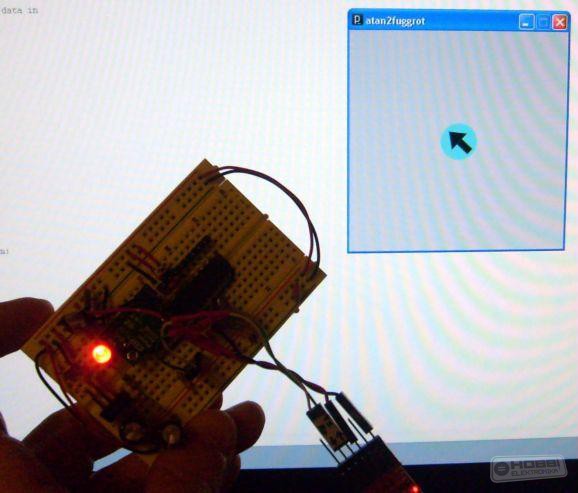
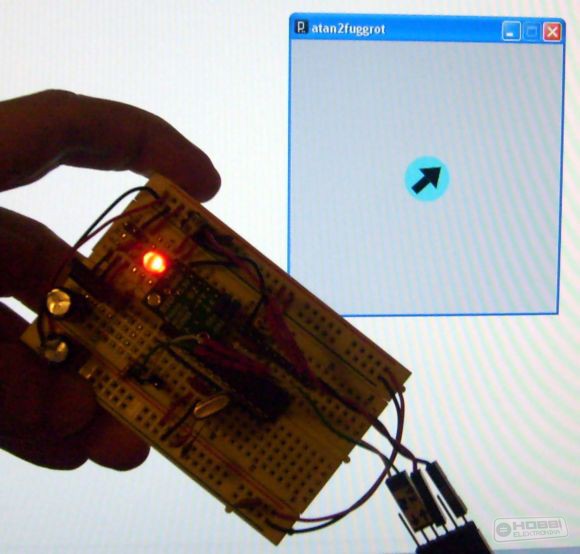
Ezt felhasználva, készítettem az alábbi Processing példaprogramot, ami a képernyőn megjelenít egy, a kiszámolt dőlésszög értékkel elforgatott nyilat.
(a videóhoz kattints a képre) Processing kód:
A cikk még nem ért véget, lapozz! Értékeléshez bejelentkezés szükséges! |
Bejelentkezés
Hirdetés |
")
")
")
")
")