Fórum témák
» Több friss téma |
Fórum » PIC - Miértek, hogyanok haladóknak
Mi mindent elhiszünk (én is néztem reggel a progit, és nem láttam benne hibát), de nagy segítség lenne, ha legalább felskiccelnéd, hogy hogy kötötted be a motorvezérlést.
Az nem akció, hanem az a termék úgy van dobozolva!
Én is így vettem annak idején, a Microchipnél néztem utána, hogy az a termékkód mit tartalmaz, mert a Chipcad-nél nem tudták (előtte nem volt náluk külön ilyen), és meg kellett rendelniük. Aztán mikor megjött, együtt bontottuk ki, és ők csodálkoztak a legjobban, hogy két csupasz panel is van a szerelt mellett. Nekem így lett valami 18F (talán 4423) az egyik boardra felszerelve, azon tanultam meg a 18F asm-et.
Még ezzel a pár LED-el, és pár kapcsolóval is sokat tanulok.
Azért gondoltam én is erre a verzióra.
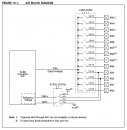
Igen azt hiszem a helyreigazítása kicsit jogos. Tehát a melléklet fájl tartalmazza a kapcsolást. Köszönöm ha eddig, is időt fordítottatok rá.
Sziasztok!
Köszönöm a sok hasznos infot PIC18F-ügyben. Föleg HP41C-nek és icserny-nek köszönöm a segitőkészségét. Ha valami nagyon nem megy 18F ügyben akkor majd kérdezek. Sziasztok
Hogy minél kevesebbet kelljen kérdezni, érdemes elolvasni azt, ami már le van írva a PICCOLO projekt fantázianevű honlapomon.
Végigkövettem a rajzot, és én is arra jutottam, hogy ennek mennie kellene. Elektromosan nem látok rajta semmi olyat, ami problémás lenne, a P3A-P3D sorrendje is jónak tűnik.
Talán azt kellene megoróbálni, hogy a tesztprogiban az irányok sorrendját megcserélni. Abból talán kiderül, hogy az egyik iránnyal, vagy magával az irányváltással van-e baj. Az adatlapot nézegetve semmi különöset nem láttam, amit irányváltásnál figyelembe kellene venni, sőt, azt írja, hogy a P1M1 bit határozza meg full bridge módban az irányt, és gyakorlatilag bármikor megváltoztatható, a következő PWM periódus már az új állapot szerint fog lezajlani. Esetleg ki lehetne próbálni, hogy csak azt az egy bitet (bit_set -tel) megváltoztatni irányváltáskor.
Szerintem is jó a rajz(alaposan meg lett tervezve).
Próbálj keresni a microchip oldalán erratát, hátha van benne valami ezzel kapcsolatban!
Én még az errata előtt talán megnézném azt is, hogy a C kód mire fordul le...
Vagy szimulátorba megnézném, hogy a regiszterbe az kerül-e amit szeretnék, és kikerül-e a lábakra a megfelelő szint.
Köszönöm a válaszokat. Az irányok sorrendjének megcserélésével is ugyanígy fenn álla a hiba és akkor is ha bit_set-el váltok irányt. Az erratát átnéztem és sajnos semmilyen utalás sincs az ECCP-re. Megnéztem a lista fájlt én semmit sem látok benne ami furcsa lenne szerintem az is rendben van, belinkelem azért hogy ne csak én állítsam. A szimulátorban kipróbáltam és jól működik, azonban van egy lényeges különbség. Amikor a program ahhoz a részhez ér amikor a portokat direktben vezérlem a szimulátor nem állítja be a megfelelő szinteket a portokon ami logokus is hiszen azt az ECCP használja, a valóságban ezzel szemben a portok ugyanúgy működnek mintha sima digitális I/O-k lennének.
Szisztok! Bocsánatot Kérek A Kisbetűért!
Hp41c azt irta, jó a movf, különben szerintem nem ettől nem működik jól. Ti , akik Pengék vagytok Pic-ben, hogyan csinálnátok + azt, hogy egy gombnyomás - kimenet bekapcs, egy gombnyomás kimenet kikapcs...és ne prellezzen, meg egyéb...? És gyújtászavart se szedjen be, autóba kell... Én nem sűrűn látogatom ezt az oldalt és nem vagyok tisztában a Formalitási szabályokkal, bocsi...Csak azt gondoltam, tud valaki segiteni, és szivesen teszi.. Bármilyen autóriasztós kérdésben bármikor segítek bárkinek kisbetűvel is... köszi .
Én pergésmentesítést csináltam az ilyesmihez. Egy nyomógombnál vagy kapcsolónál, amit kézzel nyomkodunk, úgysem számít, hogy néhánytíz ms késéssel reagál valamire.
Szia!
Én nem azt állítottam, hogy oda jó a movf STATUS utasítás, hanem azt, hogy a movf STATUS,f utasítás nem alkalmas a STATUS visszaállítására, sőt inkább elrontja a STATUS értékét... (Z bitet beállítja a STATUS előző értéke szerint...) Ha ott nem a movwf STATUS szerepel, akkor biztosan nem jól működik. Prell mentesítés Szia
Milyen fordítót használsz? Fel tudod tenni a jelenlegi C kódot?
Hülye kérdés volt, a lista fájl azzal kezdődik.
 Miért nem a C18-at használod? 
Átírtam a lényegi részt MCC18-ba és nekem működik a szabályzás mindkét irányba. A szimulátor szerint a 4 kimenet megfelelő szinteket vesz fel és a kitöltésnek megfelelően változik...
Viszont a rajzodat jobban megnézve egy gondot vélek felfedezni! A felső FET-ek tápja magasabb, mint a gate vezérlő feszültsége, így azok nem nyitnak ki soha, legalább is elvileg. Ne kérdezd, hogy ennek ellenére miért "működik", mert nem tudom, de elvileg nem jó így. A gate fesznek magasabbnak kéne lenni, mint a felső FET-ek tápfeszültsége. Erre vannak speciális szintemelő driverek, mint pl. az IR2113.
Sziasztok!
Valaki már foglalkozott olyan UPS-el, aminek van RS232 DB9-es kommunikációs port van, amit nem számítógéppel, hanem PIC-el figyeltet? Régen rákötöttem a WIN NT gépre, hát alig működött normálisan, most meg egy olyan terembe kellene, ahol olyan berendezések, laptopok vannak, amin nincs soros port... Köszi
Pontosan az, hogy milyen adatok jöhetnek, vagy hogy kérhető le az UPS COM portján?!
Erre nem nagyon találtam doksit  Tehát egy PIC meghajt egy LCD kijelzőt, ahol leolvasható, hogy kb hány százalékon vannak az akkumulátorok. Köszi
Én úgy gondolom, hogy ehhez az UPS-ed adatait kellene ismerni. Ha már megvan, milyen formában kell megszólítani, és hogyan válaszol(azaz a protokoll), akkor térhetünk rá a PIC-es LCD kijelzőre(mert az ide tartozó téma).
A PIC belső A/D-jét szeretném használni és jelen esetben most nagyon fontos hogy ne ugráljon a mérési eredmény. Külső referencia-forrást használok, Vref- és Vref+ -al. Ettől a referencia stabil lesz, ez oké. Viszont a mérendő jelet a PIC a saját GND lába és az ANx bemenet közt méri, jól gondolom? Ez elég baj ha így van, mert a PIC GND lába digitális föld. Vagy ha a PIC Vref- lábát használom akkor egyben ezt a potenciált veszi figyelembe az ANx bemenetek földjeként is?
Az adatlapból sajnos ez nem derül ki:
Én úgy gondolom, hogy a -ref-et veszi AGND-nek, ha az van kiválasztva, tehát ahhoz képest mér.
Az A/D +-1 digitet mindenképpen ingadozik, ezzel számolj. A mérést befolyásolja a bemeneti impedancia(ez max 1k lehet), amit külső OPA-val tudsz erősíteni(pl. MCP6001) Érdemes RCR bemeneti szűrést használni, a mérendő jeltől függően minél nagyobb időtaggal(C-vel).
Köszönöm hogy ennyi időt fordítottál rá. Igaz a szimulátorban nekem is jól működik csak a valóságban nem. A fetek kinyitnak mert a fet driver a tápját egy charge-pump áramkörről kapja. A rendszer egy 2 cellás LiPo aksiról működik tehát sajnos az IR által gyártott ilyen jellegű fet driverek nem jönnek szóba mert azok csak 10 V felett hajlandóak működni legalábbis azok amiket én ismerek és elérhető a boltban, mondjuk akár írhattam is volna róla de nem gondoltam hogy szóba jön mert én a PIC-et hibáztattam. Mindenesetre köszönöm a hozzászólásokat ha más nincs direkteb vezérlem a portot de ha visszakapom a hőlégfúvómat akkor kicserélem a PIC-et.

De ez biztos? Mert azt írtad hogy "én úgy gondolom..."
 Szerintem is így lenne értelme, de szeretnék teljesen biztos lenni benne. Szerintem is így lenne értelme, de szeretnék teljesen biztos lenni benne.
Szia!
Az én UPS-em nagyon régi, nem nagyon találtam róla leírást. APC Smart-UPS 600 És bocsánat, hogy ide írtam 
Sajnos az UPS-ed lelki világa nem PIC téma.
A rajzod szerint a FET-ek fesze(nyers fesz) magasabb, mint a driver tápja(15V). A valóságban nem így van?
Egy LED-el nem tudod megvizsgálni, hogy a maghajtó előtt és után van-e PWM jel? HA ott nincs, akkor tényleg elképzelhető, hogy a PIC valahogy elhalálozott, de elég érdekes lenne, mert nem nagyon szokott. |
Bejelentkezés
Hirdetés |