Fórum témák
» Több friss téma |
Fórum » Robotika kezdőknek
Ez nem mindig van így, a nevesebb daraboknál sose a jel van középen.
szervó vezeték kiosztás Próba előtt adatlap kell ha új szervót próbálsz, vagy bele kell nézni hova mennek a vezetékek. Utángyártottaknál meg színte kötelező ellenőrizni, egy 40 es csomagból 2 is fordítva volt beforrasztva. A hozzászólás módosítva: Dec 22, 2012
Szia!
Amit kineztel szervot az korbeforgo, ami neked nem lesz jo! Hagyomanyos szervot vegyel! Itt van egy eleg egyszeru robotkez, olcso 9g-os szervokkal megvalositva: Robotkez Persze ha valakinek van 3D printere, akkor azzal szinte mar csodakra kepes: Robotkez 2 felkesz Humanoid Robot InMoov prject weboldala A hozzászólás módosítva: Dec 22, 2012
Talált süllyedt.. éppen ilyen kezet akarok majd végeredményben készíteni, szinte ugyanezzel a vezérléssel, csak nem gumi ujjakkat.
 Csaaak azt nem értem, hogy miért baj az, ha körbe forog a szervo. Az tény, hogy jelen hardver-hez nem kellene körbefordulnia, de ha tetszőleges szögbe tudom vezérelni, akkor végülis mindegy nem?!?! :| Csaaak azt nem értem, hogy miért baj az, ha körbe forog a szervo. Az tény, hogy jelen hardver-hez nem kellene körbefordulnia, de ha tetszőleges szögbe tudom vezérelni, akkor végülis mindegy nem?!?! :|Bár persze ár szempontjából ha a "hagyományos" szervo olcsóbb akkor biztosan jobban megérné, de olyat eddig egyik webáruházban nem találtam. Most, hogy ránéztem a küldött linkre, a micro servo néven viszont találtam a neten szervokat. Ez például megfelelne szerintetek? Bővebben: Link Csak azt nem tudom, hogy az a 60° elég lesz-e... Bár elvileg ha hosszabb kart rögzítek a szervo tengelyére akkor nagyobb ívet ír le, vagyis elméletben biztosan be tudom húzatni mindegyik ujjat igaz?!? A másik viszont: az belinkelt szervo motornál szerintetek a csak a szervot küldik, vagy mellé a képen látható tengelyre szerelhető "karokat" is?!? És ennek tengelyre szerelése egyszerűen csak becsavarozással történik?!?! A hozzászólás módosítva: Dec 23, 2012
Azért nem vagyok benne biztos, hogy amikro szervo elég lesz. A bowdenek húzogatásához kell azért energia.
Ha hosszú a kar mégnagyobb motor kell mert elvész a nyomaték. A karokat adják hozzá. Egy bordázott tengejre kell rányomni és csavarral biztosítani. Én körbeforgó szervoval húznám, úgy hogy egy kört magára teker a motor. Úgy kell méretezni, a húzó keréket, hogy a kerülete a húzandó úttal egyezzen meg. Ekkor kisebb átmérő is elég, így lehet nyomatékot nyerni.
Próbálok keresgélni az említett weboldalon körbeforgást biztosító szervot, de mindenhol csak az van feltűntetve, hogy 0.xxsec / 60 fok. Nah most ez csak valami szabvány értékmegadás lenne, vagy náluk minden szervo csak 60°-os elfordulásra lenne képes?!?! Szinte mindegyiknél csak ez van feltűnteve, mindegy hogy mini, micro, vagy standard...
Ez a szervo sebességére utal. 0.xxsec alatt fordul el 60°fokot.
Akkor nagyon komoly adatlap ha a sebesség meg van adva, de a szögelfordulás az szinte sehol....
Szia!
A normal szervonal a szervokar poziciojat tudod beallitani egy adott szogertekre a szervora adott impulzus szelessegenek a megadasaval ( pl. 1ms-os jellel az egyik vegallasba all a szervo, 1.5ms-os jellel kozepallasba all be, 2ms-os jellel a masik vegallasba all be es igy tovabb...). A korbeforgo szervonal a szervo poziciojat nem, csak a forgasanak a sebesseget tudod valtoztatni az impulszus szelessegevel (1.5ms-os jelnel a szervo nem forog, 1ms-nel teljes sebesseggel forog elore, 2ms-os jelnel pedig teljes sebesseggel forog hatra de folyamatosan forog, nem all meg). Ezzel nem tudod a robotkaron az ujjakat mozgatni, mert ahhoz az ujjmozgato bowdeneket egy adott tavolsagra kell meghuzni hogy egy adott pozicioba alljanak be.
Vagyis az említett parallax körbeforgós servo nem is lenne jó a célra? Bővebben: Link
Ez esetben viszont nem sok opcióm van, csak a 60°-os kitéréssel rendelkező szervo motorok.... De egyébként ha már megint előjött a sebesség kérdése, akkor elvileg a nem körbeforgós szervok-nak is tudom a sebességét szabályozni igaz?! Elvégre is ha a kiadott impulzusok között (persze a végrehajtásukhoz szükséges T idő után) deltaT idő telik el, amit én határozok meg, akkor kvantált szögértékek között ugrálva akár manipulálhatom a sebességet, ugye?
Keres valaki modellezőt a közelben. Egy szervóm van, csak arról tudok nyilatkozni. Általában 200°ot bejárnak a szervók, sajnos ritkán adják meg mennyi a játékuk. Modellezésre van kitalálva elsődlegesen, és ott 180°nál többre nagyon ritkán használják. A mozgási sebességét azt megszokták adni 4,8Vra és 6Vra is. Általánosságban számolhatsz 180°al, neked se kell több drótot huzigálni. Ha csak nem csinálsz feltekerőt, de nincs értelme, általában jön a szervóval a csomagban karok és csavarok is.
A szervót 1÷2ms-os inpulzusokkal "gerjeszted" régi analóg szervók 20msos frissítést vártak el. Ez 50Hz-nek felel meg. Tehát ilyen gyakran kapott a szervó információt, hogy hova álljon. Ha kicsit elmélyednél a modellezés világában jobban értenéd a dolgokat. Mivel egy kis szünet kell az adásban azért akár 8, 9 szervó adatát is át lehetett vinni 20ms alatt (csak azt a jelet viszik, hogy milyen hosszú az impulzus a szervónak). Ha nyolc szervót középre állítasz az 8*1,5ms-os adás 12ms ot adtál információt a rendelkezésre álló 20msból. Analóg rendszerben ritkán használtak 6 szervónál többet. Az újabb digitális szervók információját már kódoltan viszik és ezért sokkal gyorsabb a rádiós átvitel. Ezért ezek szervók már alkalmasabbak gyorsabb jelfrissítésre is. Nem tudok pontos értéket, de képzeld úgy, hogy 5ms-onként küldöd neki az információt, ez már 200Hz-es frissítés. Te kénytelen vagy legalább 20ms-onként küldeni jelet a szervónak, ha ezt nem teszed, nem fogja tartani a pozíciót, engedi, hogy a húzás elsétáltassa a karját, magától ő nem kellene, hogy vigye. A megadott fordulási sebesség a maximális érték minimuma (ha egyik végállásból a másikba küldöd, legalább ilyen gyors lesz, de lehet akár gyorsabb is, gyártási szórás). Ha lassabban akarod forgatni, akkor szépen lassan változtatod a kívánt értéket, és ha alatta maradsz sebességben, annak amit megadtak a katalógusban, biztosra veheted, hogy a szervó fel is veszi amit mondasz neki. Mivel 20msonként küldesz neki jelet, a sebességet azzal szabályozod, hogy mekkora különbséget csinálsz a két jel között. Ha két végálát közt 0,1ms-ot tolsz minden küldéskor, akkor (2-1)/0,1=10 küldés kell az 10*20ms=0,2s a két végálás között, ha csak 0,02msot tolsz mindig akkor (2-1)/0,02=50 inpulzus (adatküldés), akkor 50*20ms=1s idő az elfordulás. Remélem így már kicsit világosabb. Bírod még, hogy akár sűrűbben küldesz adatokat, de 20ms alá ne menj, esetlen egy 40ms lehet, hogy elvisel, de nem lehet csak 1sonként frissíteni, mert bármi történhet.
A sebesség szabályzás terén nekem is ilyen elképzelésem volt. Örülök, hogy alátámasztottad. A másik dolog a szervo által bejárt szögelfordulás. Ha valóbana legtöbbje képes 180°-os elfordulásra az nekem bőven elég, szóval elképzelhető, hogy maradok valami olcsóbb kategóriás szervonál és hanyagolom a parallax-ot.
Modellezésbe beleásnám magam, ha lenne időm, de sajnos nincs. Másfél évvel ezelőtt még programozni sem tudtam, szóval úgy érzem jó tempóban haladok mert azóta már iszonyú sok kütyüt eszkábáltam és programoztam. De ami késik nem múlik ugye... Ha még megengedsz egy kérdést: AZ alábbi két motorból melyik lenne alkalmasabb az ujjak vezérlésére? Egyik link Masodik link Sajnos nem vagyok jártas ezek világában de nekem ez a 2.0kg.cm adat is elég nagynak tűnik. Persze hozzá tartozik, hogy nemtudom pontosan mit jelent A másodiknak ugyanezen adata: 5,2kg/cm. A különbség árban és súlyban van közöttük, és nem tudom melyik lenne ideálisabb. Naivan azt gondolnám h egy ujjhoz a kisebb is bőven elég, de nincs mihez mérnem a dolgot. Ha tudtok akkor pls segítsetek dönteni!
Nekem is van még mit tanulni, meg csinálni, de azért olvasgatok sokmindent. Ez a szervó ereje, 1cmre, a tengely közepétől ekkora erővel tud húzni, 2cmre fele ekkora. Nyomaték = erő * erőkar. Attól függ, milyen nehéz tárgyakat akarsz emelgetni a karral, és milyen nagyon kell húzgálni (ha többet kell húzni, hosszabb a kar, kisebb az erő).
Én is olvasgatok, csak eddig még soha nem került sor ilyen témára. A szakdolgozatomat is a PIC vs AVR vs 8051 témakörre építem, szal inkább arra áldoztam időt, de úgy érzem abban is szerepet kapnak majd a szervo motorok, szal jöhet a kompenzálás.
Viszont köszönöm a segítséget! Így olvasva tök logikus a dolog. Úgy gondolom most már csak le kell valahogy modelleznem a kezet, aztán könnyebb lesz dönteni szervo téren is. Amint végeztem a projekttel vagy látványos eredményhez jutottam majd feltöltök egy-egy videót, hogy mégis csak nyoma legyen már ennyi kérdésnek.
Sziaszot
Nem robotot szeretnék csak egy jó szabályzó érdekelne PIC-re, két motoros kivitel ami esetleg megy elöre és hátra. Van valakinek ötlete?
Miért is használnak ritkán 6 szervónál többet? Ahány láb a vezérlőn annyi szervó, szerintem... És még azt is figyelembe kell venni, hogy nem minden szervó csak 1 és 2 ms es jel között dolgozik.
Idézet: „Analóg rendszerben ritkán használtak 6 szervónál többet.” Olvasd el még egyszer. A szervók, amit ilyen néven ismersz a modellezésben használt szervó. Ennek az elsődleges felhasználását fejtegettem. Még ma se túl elterjedtek a 6-nál több szervót tartalmazó modellek.
Én is pont ezekre a kis RC szervókra gondoltam. Nézd meg neten a robot projekteket, robotkarokat és látod, hogy jóval 10-12 szervó felett járnak. Vagy nézz át itt a hexapodos topicba, ott is szenzorok nélkül 18 szervó kell. De egy komolyabb repcsiben is több ilyen moci akad már. És itt csak a sima olcsóbb RC szervókra gondoltam, a buszrafűzhető robotszervók már más kategória.
Szia! Teszveszen beírod, hogy " alkatrész" - egy rahedli helikopter modell fogaskereket kapsz eredményül
 Ráadásul mind kicsi motorhoz - sőt itt motorok is vannak, amik beleférnek a kéz projektbe... Ráadásul mind kicsi motorhoz - sőt itt motorok is vannak, amik beleférnek a kéz projektbe...
Sziasztok!
Abban szeretném a segítségeteket kérni, hogy szeretnék számítógéppel vezérelni egy robotot. Nem kell nagyon robotra gondolni, csak pár funkciója van. Hogyan tudnám megoldani, hogy a dolog interaktívan működjön. Persze valamilyen programozási nyelvel ( gondolok itt a C -re) írnék egy programot amivel megadott funkciókat megcsinálja, de fontos lenne hogy saját magam is vezéreljem. Tudnátok segíteni?
Eloszor is el kell donteni, hogy helyhez kotott (vezetekes) vagy vezetek nelkuli, szabadon mozgo (akkus) lesz-e. Ez a hardver miatt lenyeges. Aztan jon a meret kerdese.
Fontos az, hogy tisztazd, mire is akarod hasznalni, mert menet kozben foltozgatni mar nem tul jo otlet. Celszeru minden lehetseges dolgot ratervezni a panelre, max az elejen csak a letfontossaguakat kotod/ulteted be. Maga a vezerles ugy tortenik, hogy a szamitogep 0 es 1 jelekkel vezerel bizonyos kimeneti pontokat, ahol hozzafersz (legegyszerubb a parhuzamos printer port). A program oldalon mondjuk beirod, hogy out 0x300,0xff erre mind a nyolc kimenet egyszerre 1-esre valt at, azaz az eddigi 0V helyett 5V koruli ertek jelenik meg a megfeleleo pineken. Az interakciot a robot felol jov jelek biztositjak, megfelelo illesztes utan ugyanide kotheted a jeleidet, beolvasasbol tudod majd, hogy mi tortent. Ha sokkal tobb adat vagy bonyolult, tobb byteos adatok atvitele valik szuksegesse, akkor erdemes interface-t epiteni, mondjuk az USB portra, egy mikrokontrollerrel. Ez a szamitogeptol fuggetlenul is tudna dolgozni es sokkal tobb ki-bemeneti vonala lehet, tud kezelni egy csomo fajta szenzort. Ha vezetek nelkulire akarod, akkor egy ado-vevo parossal kiegeszul az egesz, illetoleg celszeru a robot oldalon is tenni egy mikrokontrollert, igy akar egy paracs hatasara bonyolult muveletsort is vegrehajthat a robot.
Helló!
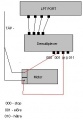
hasonlóra gondoltam, amit mondtál. Jelenleg ott tart a dolog, hogy megvan az lpt programozása. Demultiplexert használok az irányításhoz ( előre - hátra ). De elakadtam, nem is kicsit. Nem tudom összekötni a motort a vezérlővel hogy előre és hátra is tudjon menni. A polaritás megfordítására gondolok. Ugye a demux az ad egy jelet ( + ) a motornak. Persze optocsatoló és erősítő áramkört követően. De hogy tudom azt megoldani, hogy egy másik jel megfordítsa a polaritást. Töltöttem fel képet azon látszik hogy mi a gond.
Igy nehez is.
Ha van drot, akkor egy relet hasznalsz az aram bekapcsolasara es egy masik (fuggetlen dupla erintkezos) relet az elore-hatra irany beallitasahoz. Vagyis, ha az a rele nem kap feszultseget, akkor a pluszt az egyik, a minuszt a masik sarkahoz, ha atkapcsolt, akkor forditva. A releket tranyok kapcsolhatjak, amiket direktben vezerelhetsz az LPT portrol. A teljesen elektronikus megoldasnal hidat kell hasznalnod, ami kb 4 FETbol all. Keress ra a full bridge kifejezesre.
Ezt esetleg egy rajzzal tudnád szimulálni, mert nem igazán értem, hogy is néz ez ki valójában
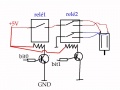
A motor a jobb oldalon.
A dobozok a relek, az erintkezoket felismered, alattuk azok a hullamos izek a relek behuzotekercsei. Az ellenallasok mondjuk szaz ohmosak. Vagy hasznalsz relek helyett egy ilyet: TLE5206 A hozzászólás módosítva: Jan 8, 2013
Egyetlen relével forgásirány váltás. 2 láb van a vezérléshez, egy az engedélyezés, másik meg az irány
Es az a PLUSZ ket darab fekete haromlabu ugyan mit keres a kapcsolasban?
Egy másik lehetséges megoldás a LabWindows (vagy másnéven CVI) környezetben C nyelven megírt grafikus felület (hasonló a visual c++-hoz), és ez USB porton (soros RS232 protokollon) kommunikál a vezérlő panellel, mivel gondolom hogy valamiféle mikrovezérlő is lesz a panelen.
Ez egy USB-t tudó mikrovezérlővel vagy mikrovezérlő+FT232 párossal megoldható. Így egy egyszerű, gyors és kétirányú kommunikáció lesz a panel és PC között. A hozzászólás módosítva: Jan 8, 2013
2 tranzisztor. A lényeg, hogy nemkell 2 relé.
potosabb rajz
Ez a LabWindows megfogta a fantáziámat! Használtad már? Tapasztalatok?
|
Bejelentkezés
Hirdetés |