Fórum témák
» Több friss téma |
Fórum » Robotika kezdőknek
Egy HD-1600A tipusú szervóval próbálkozok. Elég olcsó, úgy gondoltam, tanulásra jó lesz. Ugyanarra a tápra van rákötve direktbe, mint a mikrovezérlő, ami meghajtja. Lehet hogy ezt kellene máshogy csinálnom?
Hogy oldottad meg a késleltetést? Egy kapcsolási rajzot feltennél?
Ok, tehát egy modellezésben (is) használatos szervóról van szó.
Amikor megkapja a tápfeszt, rándul egyet? Próbáld meg úgy, hogy a bemenet lebeg egy rövid ideig és aztán adod a vezérlő impulzusokat. Vagy ahogy fentebb írták - ha megoldható. Kísérletezz, hátha van megoldás. Ha jól kapja a jelet, akkor (kellőképp) stabilan kell állnia egy pozícióban. Finomabb felbontáshoz és nagyobb sebességhez használhatsz digitális szervót. Sokkal gyorsabban "frissít".
Nem kell kapcsolási rajz, sokkal egyszerűbb annál.
A mikrovezérlő lábára van egy tranzisztor kötve ami kapcsolja a szervók tápfeszültségét. Az analóg szervók egy belső kondi feltöltöttségéből tudják hova kell állniuk. Ha már volt egy kisülési idő mire rákapcsol a tápfesz nem fog mozdulni, feltéve ha nem forgattad el. Nekem bevált, a legolcsóbb szervókkal is.
Én tranzisztort sem tettem a proc. lábra.
Kipróbáltam a késleltetett tápfesz rákapcsolást, és működik! Köszönöm mindenkinek a segítséget!
Lenne egy másik problémám is. kis feszültségű (1-3 V) egyenáramú motorokat hogyan lehet meghajtani (mikrovezérlőn keresztül) 5 vagy 12V-ról?
Szia!
Hardverileg a legegyszerűbben, PWM-el, de annak az a veszélye, hogy programhiba esetén a motor megkaphatja a teljes tápfeszültséget. (Ha biztos vagy a program működésében meg lehet próbálni.) További előnye a dolognak, hogy fordulatszám-szabályozást is megvalósíthatsz. Ebben az esetben a legkisebb a veszteség, ha pl. akkumulátoros a megoldásod, akkor célszerű lehet. Ha több ilyen motor is lesz a berendezésedben, akkor érdemes lehet ezt a tápfeszt kis kapcsolóüzemű (step-down) tápegységgel előállítani és azt kapcsoltatni a uC-vel. Itt is tudsz fordulatszámot szabályozni, és (szoftver)hiba esetén sem kap 12V-ot a 3V-os motor. Ha csak egy (vagy kevés) motorod van és azok kis áramúak, akkor soros (Zener)diódával csökkentheted a feszültséget, de az melegedni fog! Azt is megteheted, hogy a kapcsoló tranzisztort földelt kollektoros kapcsolásban használod, és a vezérlésnél fogod meg a szintet. Tehát tranzisztor kollektora a tápon, emitterén a motor, motor másik vezetéke a földön. A tranzisztor bázisa és a föld közé megfelelő Zenerdióda, vagy több normál dióda nyitóirányban (figyelembe véve a tranzisztor B-E között eső feszültséget, tehát 3V-os motor esetén 3.6V-os Zener kell). A tranzisztor bázisa és a vezérlés (uC) közé 470 Ohm - néhány kOhm ellenállás. Hátránya, hogy a tranzisztoron átfolyik a motor árama, miközben viszonylag nagy (pl. 12V-os tápfesz esetén 9V) feszültség esik rajta, vagyis melegedni fog, hűteni kell. (5V-os tápfesz esetén csak 2V esik rajta...)
Én egy sima 3V-os fesz.stab. Ic-t: Bővebben: Link és egy motor meghajtó Ic-t (2 motort tud, h-híddal ): Bővebben: Link ajánlok. Szerintem ez a legegyszerűbb.
Zener diódát még sose használtam. Ha sorosan kötöm egy 4 V-os motorral, akkor 1 db 3v5-ös diódát rakjak be? Mindkét forgásirány esetén fog működni? Ha a motor 0,05A áramfelvételű mekkora hővel kell kb. számolni?
A lényeg, hogy a Zeneren essen az a feszültség, amennyivel nagyobb a tápfesz a szükségesnél. (Figyelembe véve, hogy a kapcsolótranzisztoron is esik valamekkora feszültség, de ez általában pár tized V, főleg ilyen kis áramoknál.)
Tehát 12V tápfesz és 4V-os motor esetén 8V-ot kell "megennie". 8V x 50mA = 400 mW. Ez elég kicsi ahhoz, hogy egyrészt ne melegedjen, másrészt ezt a legtöbb Zener elbírja. Vagyis akár a zpd sorozatúak is jók lehetnek (pici üvegtokos, vagy mégkisebb műanyagtokos). De ha biztosra akarsz menni, akkor tegyél be ZL, ZX sorozatú teljesítményzenert, akkor a motor erőlködése megszorulása esetén fellépő nagyobb áram sem teszi tönkre. Ezeknek nagyobb a felületük és fémből készültek, vagyis a hőleadásuk is jobb. Ha a forgásirány változtatását H-híddal oldod meg, akkor a Zenert a híd és a tápfesz közé tedd, mert azon akkor mindig csak egy irányban folyik az áram. A Zenert záróirányban kell bekötni, vagyis a + táp felé a katódja legyen. Ha máshogyan (pl. kettős táppal) oldod meg, és/vagy mindenképpen a közvetlenül motorral sorban kell elhelyezni akkor két Zenert tegyél sorba, egymással szemben. (pl. motor kivezetése - ZD1 anód (ZD1) ZD1 katód - ZD2 katód (ZD2) ZD2 anód - vezérlés) Így bármelyik irányú áram esetén mindig az egyik Zener nyitóirányban lesz, míg a másik záróirányban. Nyitóirányban úgy viselkedik, mint a közönséges dióda, vagyis 0.6 - 0.8 V esik rajta. Ezt is figyelembe kell venni, tehát a fenti példa esetén a 8V-os Zener helyett 7.2V-os kell. Ha a 4V-os motort 5V-os tápfeszültségről használod (az eredeti kérdésedben ezt is írtad), akkor elég egy közönséges dióda nyitóirányban. Elnézést, ha nagyon szájbarágósra sikerült az írásom, de azt írtad még sosem használtál Zenert, így gondoltam szükséges kicsit bővebben írnom.
Köszönöm a bő magyarázatot. Így mostmár minden világos.
Sziasztok
Szerintetek lehet építeni egy önműködő és beszélő robotot ? 
Szia!
Igen. Ott van például Asimo. De mit értesz az alatt, hogy "önműködő" és "beszélő"? (A "robot" már önmagában utal arra, hogy önműködő...)
A robot csak a "dolgozni" részre mutat, hogy előre meghatározott cselekvést vagy környezetre reagáló dolgot végez az már a programozás kérdése.
Szerintem ezt értette önműködő alatt. martin6789: Beszélő robotot pedig még nem, persze ha megelégszel azzal ha egy felvillanó led helyett egy felvett szöveget játszik le akkor lehet kötni kompromisszumokat. Idézet: „A robot csak a "dolgozni" részre mutat, hogy előre meghatározott cselekvést vagy környezetre reagáló dolgot végez az már a programozás kérdése.” A robot szó csak orosz nyelven jelenti azt, hogy "dolgozni". Az előre meghatározott cselekvést végrehajtó eszköz az automata. És bár a "robot" jelentését elég sokféleképpen definiálják, általában benne van a környezet változására való reagálás képessége. És az is igaz, hogy minden leginkább programozás kérdése... Természetesen az adott harver kialakítása után...
A környezetre reagálás képessége nem tudom hol szerepel benne. Bár lehet rossz irányból közelítem.
A környezet robotoknál munkatér ami előre definiálva van. Itt most lehetne kitérni például a feltérképezésre programozott "robotokra", de ez a környezetre reagálás összetettebb mint egy ütközés elkerülés. A tipikus iskolapélda erre a két kapcsoló egy járószerkezet elején, viszont ebből nem sok "döntésekhez szükséges adat nyerhető" Az hogy merre térjen ki már megkövetel egyéb információkat például egy távolságmérő szenzort merre van szabad út... de akkor már kellene a domborzatot is figyelni mert nem mindegy, hogy egy emelkedőn vagy vízszintesen mérjük a távolságot ha már feltérképezünk.
Emlékeim szerint, ennek az előadásnak az elején van egy kis infó a robotok fajtáiról és magáról a robot szóról.
Szia
Az önműködés alatt azt értem hogy nem mi mondjuk meg neki mit tegyen hanem önállóan hozza létre az utasítást mint például a Rövidzárlat 2 című film ben az 5-ös robot más nevén Johnny5.
Valószínűleg mesterséges intelligenciára gondolsz.

Elég nehéz dolog a mesterséges intelligencia megalkotása. Nem hinném, hogy az egyszerű robot kategóriába tartozna. Vagy az én ismereteim avultak el alaposan a hobbirobot építésről.
Sziasztok! Elsősorban Fizikus segítségére számítok, de természetesen ha valaki másnak is van valami építő ötlete, nem zárkózom el tőle! Előre is köszi mindenkinek aki segít!
A problémám a következő: SPI buszra ültettem 1 SD kártyát és egy 3310-es LCD-t. Sajnos olykor ki sem ír semmit, olykor elcsúszik csak. Teszek fel róla képet, amin hibajavítási célzattal párhuzamosan rákötöttem két 3310-es LCD-t. Az volt a poén, hogy ilyenkor csak az egyik szövege csúszott el, de pár indítás után az SD-re hibásan írt, ami miatt az SD-n elszállt a FAT tábla... Most 4MHz az SPI freki, de próbáltam 0.5 és 8 MHz-et is. Az ATMega32, amivel hajtom, pedig 16MHz-es kristály rezgeti (az is volt már belső RC oszcillátorral 1, 4 és 8 MHz)... Várom az ötleteket, segítséget, tanácsot.
Szia! Olyan önműködő megoldás, amit a filmben láttál tudtommal nem létezik. Kivéve az evolúciós programokat, amelyek párhuzamos szálon futtatják a megoldási lehetőségeket és mindig a leggyorsabb megoldásra váltanak. De hogy ezek helyesek-e azt általában a programozó dönti el - mint a robotzsaruban, vagy Asimov regényeiben, mert ő gondolkodásra is képes - a robot nem. Direktívákra és prioritásokra szüksége van. Olykor még mi magunk - emberek sem hozunk jó döntéseket, de ez a tökéletlenség a titkunk
A robotokra pedig nagyon nagy felelősség ilyen döntést testálni. Miért? Nézd meg a csatolt videót és képzeld el, hogy egy ilyen súlyú, erejű, sebességű és felszereltségű gép dönt - adott esetben a sorsodról, az életedről:Bővebben: Link
A PCD8544 vezérlő adatlapja szerint (ha az van benne) maximum 4 MHz az SPI frekvencia. Ez is nyilván csak akkor megy, ha a vezetékezés, és a buszra kötött egyéb alkatrészek nem rontják le az átvitelt. Vannak ezen kívül más időzítési feltételek, amelyek teljesülését érdemes ellenőrizni a programban. PL. hogy a CE, D/C, s az adatvonal mennyivel hamarabb álljon be az órajelhez képest, stb.
Köszönöm a választ, elírás volt a kódomban.
 Javítottam és működik! Javítottam és működik!  Köszönöm mégegyszer! Köszönöm mégegyszer! 
Sziasztok
Építeni szeretnék egy kétujjú robotkezet de nem tudom milyen mechanikai megoldást alkalmazzak a két ujj összecsukódásához és szétnyitásához hogy meg tudjak vele fogatni bármit. Csatolok egy képet nem valami jól ábrázolja a robotkezet, a nyíl a szét és becukódást mutatja.
Szia!
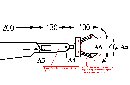
Az ELTEn van egy demonstrációs célú robot, annak az ujjai a rajz szerint vannak megoldva. Nem tud nagy súlyokat mozgatni, de nem írtad, hogy te mire fogod használni. Viszont az elv a lényeg: így a két ujj párhuzamosan mozog, tehát nem fog szögben állni. Így pl. hengeres dolgokat ugyanúgy meg tud fogni kis átmérő esetén, mint nagy átmérőnél. Amit te rajzoltál, annál minél nagyobb a megfogandó tárgy, vagyis minél jobban ki van nyitva a két ujj, annál nagyobb az esélye, hogy a tárgy kicsúszik az ujjak közül. A párhuzamosságot a rudazat biztosítja, mint a kosarasdaruknál, csak itt kettő van belőle egymással szemben. Itt a mozgatást huzallal oldják meg, rugó ellenében. Ez ad némi védelmet túlterhelés ellen, illetve károsodás-mentesen bármikor kivehető, vagy betehető egy tárgy a kézbe. (Hallgató-biztos megoldás...)
Egy ilyen konstrukciot is konnyen el lehet kesziteni:
Robot Claw
Ennek mondjuk nem ket ujja van, hanem egy komplett kez:
Bővebben: Link 1 Bővebben: Link 2 Bővebben: Link 3 Bővebben: Link 4
Az elozo hozzaszolasomban levo robtujj tervrajza:
|
Bejelentkezés
Hirdetés |