Fórum témák
» Több friss téma |
-Igen, így lehet az 555-tel. Ha CMOS verzió, a fogyasztás kisebb lesz, és a frekvenciaátfogása pedig nagyobb.
-Támogatom az expozíció közbeni leállást, de ez elég egyszerű, ha a léptető 555 impulzusait az egyik (2?) lábán letiltjuk. -Fogyasztás? Úgy lenne a takarékosabb, ha léptetőmotor esetén a kívánt lépésszámot gyorsan lelépné, és utána várna, kikapcsolva a motor gerjesztését. A csavar-csavaranya kapcsolat úgyis öntartó. Feltételezem, hogy nem golyósorsót fogsz használni  Itt van előttem egy ablaktörlőmotor csigahajtóművel, 5V-on 1A-t vesz fel. Egy mai ceruzaakksi már megbirkózik vele, már ha nem egy BlueBaby Itt van előttem egy ablaktörlőmotor csigahajtóművel, 5V-on 1A-t vesz fel. Egy mai ceruzaakksi már megbirkózik vele, már ha nem egy BlueBaby -Proci, vagy logikai IC-k? Nagy kérdés, távlati terveid, tudásod, szimpátiád dönti el.
Bocs elirtam az IC nevét, mindössze L298 , M nélkül.
A tömeg a kocsival együtt kb 4 kg lehet, de ez nagyon maximum, inkább 2,5, vagy annyi se.
A sínt és a mozgatást "kötéllel" oldanám meg. ha kis átmérőjű a tengely, amire csévelem, az már sokat számít (mondjuk itt előjön az a probléma, hogy nem jó, ha egyre magasabb a kötél tekercs), illetve a hossz szempontjából ez a legegyszerűbb, könnyedén módosítható hosszabb pályához. A menetes szárnak annyi az előnye, hogy szinte biztosan nem csúszik vissza. Cserébe nem módosítható egykönnyen a hossz, illetve körülményes eljuttatni kézzel a kamerát A-ból B-be, hogy megnézzem a pontos képet. A tömegét ha emelkedőre megy, akkor mindenképpen kompenzálnám, tehát messze nem az egész tömeget kell emelni, bár nyilván nagyobb lesz a súrlódás is. Egy ciklus valahogy így nézne ki: Exponálás Várakozás Mozgás Várakozás Ebből kettő tényezőt kellene precízen állítani, a mozgás hosszát, illetve egy ciklus idejét. Az exponálás utáni várakozást is jó lenne állítani legalább nagyságrendileg (pl.: 0,25s, 0,5s, 1s, 2s, 4s), hogy tuti ne mozdítsa be. A motornak a lépésszámot a lehető leggyorsabban le kell lépnie. Az elemeknek kell bírni 2 órát. IC-vel gondoltam, a procik még a következő félévek anyagait képezik. A ciklus hosszának az időzítését NE 555-tel meg lehet oldani, ha jól vettem ki az adatlapjából, egy adott kapacitás mellett, egyenesen arányosak az ellenállás-idő értékek. De ha van jobb ötletetek szívesen fogadom. Kivezetni egy indító kapcsoló kell, egy ciklus hossz állító potméter/akármi, illetve egy lépésszám szabályzás, és valamilyen módon egy várakozási idő szabályzás. A lépések számát milyen módszerrel lehet könnyen állítani? Az expo utáni várakozást milyen módszerrel lehetne megoldani? Biztos jó az nekem, ha az időzítő időzítését változtatom? Milyen módszerrel tudom megoldani, hogy az egész kapcsolástól galvanikusan elválasztott kioldás legyen? Elég lenne létrehozni egy rövid időre a rövidzárat. L 298-at hogyan kell használni, mert nem igazán sikerült megértenem az adatlap alapján? Minden bizonnyal egyszerűbb lenne processzorral. C-ben azért elég jól kiismerem magam, viszont a mikroprocesszorban egyáltalán nem.
-A lépések számát, ha korrekten akarod, akkor számolni kell egy (több) programozható osztóval. Pl 74192-vel. Ezzel egy peremkerekes kapcsolóval állíthatod az impulzusok számát. 70-es évek feelingje...Vagy lehet egy 555-tel kapuzni az oszcillátort, ha nem baj, ha tévedni fog. Meg hát a beállítás nehézkes.
-Az expo utáni várakozást? Talán ide is jó az 555. El kell dönteni, mit akarsz pontosan beállítani. -Biztos jó az nekem, ha az időzítő időzítését változtatom? Nem tudom, mire gondolsz -galvanikusan elválasztott kioldás ... Egy reed-relé jó lesz! -L 298-at hogyan kell használni? Ez egy teljes híd, a motor minkét tekercsének, a segítségével be tudod azokat kapcsolni, illetve rajtuk az áram irányát megváltoztatni. U.i.: leválasztásnak az optó nehézkes, mert a tápját a gépből kell venned. meg stb... Lehetne 555-ökből felépített lefutóvezérlés is...kvázi futófény....csak ötlet A hozzászólás módosítva: Jún 2, 2013
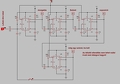
Igy valahogy gondoltam...a Proteusban működik...a monoflopok egymást indítják, a négy kimenet aktív ideje függetlenül beállíthatóak. Csak azon aggódom, hogy a lépésszámnak korrektnek kellene lenni, igy legalább annak digitálisnak kellene lenni. pl számláló rendszerű időzitővel lehetne. Ezt a gyakorlat mutatná meg, hogy elégséges-e az 555 szórása és hőfüggése. Ja és kellene egy végálláskapcsoló, ami az egészet letiltaná.
A hozzászólás módosítva: Jún 2, 2013
A feladat mint mondtam elég egyszerü, néhány változval megodhato:
Exponálás. - 1 kimenet Várakozas - t1 idö Mozgás - s1. - egy bizonyos lépésszám Sebesség - v1. Az orajel frekije Ez kb a feladat. A t1 idö lehet 555 S1 - egy számlálo V1 - az lépések frekije - 555 Ezzel az egyszerü algoritmussal szinte minden megoldható. Az expizicioval inditasz, ami egyben inditja a várakozási idöt mérö elsö 555-t. Ha ez visszabillen elindul az s1 számláló ami az orajel impulzusadoját számlálja. Azaz az orajelböl csak s1 számu impulzus jut a motorba ( a sebességet az orajel frekijével lehet változtatni. Az utolso impulzus inditja az expozicios fokozatot, és igy zárul a kör. Elegánsan meg lehetne oldani egy uP-vel is. A köteles mozgatás jo, de ugy hogy a kötelet legalább 2x átveted a hajtott dobon - a végére meg ellensulyt akasztasz, hogy kiegyenlitse a kamera tömegét.
Még mindig nem tudjuk pontosan mit is akarsz igy a saját berendezésem alapján irtam a fentieket. Nálam fontos, hogy az egyes állások egymástol egyforma távolságra legyenek, azaz az s1 lépésszám a távolságot és az idöt is megadja, hiszen ha lassabbak az orajelek, akkor lassabban ér a célba. Amint viszont odaér elvben azonnal exponálhat, majd pedig kezdödik a várakozás t1. Ezután a kocsi ujra elindul ugyanannyi lépéssel, ugyananyi idö alatt a következö állásba stb.
Jobban belegondolva tényleg fontos, hogy ugyanannyit menjen pontosan, és a képek is pontosan ugyanannyi időnként készüljenek, mert ha valamelyik is eltér, akkor az baromi hülyén tud kinézni a végterméken.
555-tel kapcsolatban lenne pár kérdésem. A triggerel lehet indítani a ciklusokat? Lehet csak egyetlenegy ütemet csinálni vele? Tehát ha mondjuk jön egy indító jel, akkor egy idő múlva produkál egy le/felfutó élt, aztán többet nem, csak ha újabb indítás következik? A válaszok alapján átgondoltam, hogy hogy lenne a legegyszerűbb. A következőre jutottam: Az expozíciók pontos időzítése fontos. Tehát kell egy időzítő, ami folyamatosan ciklik. A ciklus idő adja az expozíciók időbeli távolságát. Ezt kell tudni állítani. A ciklus elején kapja a relé a jelet az exponáláshoz. Ekkor indul az expo utáni várakozási idő (ami a hosszabb záridőkhöz kell). Ezt nem kell túl nagy tartományban állítani. Ha ez eltelt, akkor indítja a számlálót, ami egy másik időzítőtől kapja a jelet (ennek állítható frekvencia kell, bár ez annyira nem fontos). Bizonyos lépést meg tesz. És itt befejeződik az egész, ha lelépte, akkor nem csinál semmit egészen a következő expozícióig, így nem kell ide is egy várakozási időt beiktatni. Előfordulhat az, hogy hogy még nem fejezte be az egy ciklust, amikor már az újat kellene kezdeni, de ezt odafigyeléssel ki lehet védeni. Hogyan lehet a számlálót állítani legegyszerűbben, hogy meddig számoljon? Az egyszerűt a későbbi használat közbeni állítást értem. Összesen kell egy expo távolság idő, várakozási idő, mozgási lépésszám (, illetve a frekvencia). Egy egyszerűbb változat is eszembe jutott. Az egész annyiban módosulna, hogy először mozog, aztán vár egy fix időt, exponál. Mindezt szintén az expozíciók távolságának megfelelő frekvenciával. Ezzel a várakozási idő állítását lehetne elhagyni, viszont tudni kell azt, hogy a mozgás után mennyivel lesz stabilnak tekinthető az egész rendszer, hogy ne mozduljon be. Szerintem ezt be lehet lőni akkorára, hogy nagyon ne korlátozzon a beállításokban, viszont egyszerűbb legyen.
Még mindig nem döntötted el mivel akarod megépiteni. Ha TTL IC-kkel, akkor az melitett számlálot ugy programozod, hogy a bementre beirod a lépések számát (HEX-ben) pl. 100-at, és ezt fogja nullázni a bemenet. azaz ha megérkezik a 100. impulzus a számlálo küld egy jelet, hogy 0 van a kimenete, azaz a motor ellépett 100 lépést (az adott irányban).
TTL IC-vel mert máshogy nem tudom.
Ezzel a számlálóval az a baj, hogy nem tudom, hogy meddig kell számolni nagyságrendileg. Mekkora a fordulatszáma és a nyomatéka egy cd lejátszó motorjának, vagy egy ebay motornak. Akkor nagyságrendileg már lehetne mit mondani. Könnyen lehet, hogy sok kell ebből a számlálóból. Milyen módon változtatnád azt, hogy meddig számoljon? Sok kapcsolóval? Bocs, hogy ennyit kérdezek, és értetlenkedek, de egyedül messze nem az optimális megoldást hoznám ki. Motornak egy cd meghajtóból kibuherált is jó, azt mondjátok? Egy szaggatott forrszemes nyákra drótokkal építeném meg, mert nem tudok megfelelő csinálni, meg furkálni. Már építettem ilyenre, de nem ilyen komplexet. A hozzászólás módosítva: Jún 5, 2013
Ahogy írtam vala, peremkerekes kapcsolóval, de lehet DIP-pel is. Ha sokat kell osztani, akkor "előosztó" kell. A CD motor pedig ide...hát lepkef...g (már bocs)
De még valami: a mechanikád tud majd vízszintesen is működni? (Mert zsinórt (kötelet) írtál) A hozzászólás módosítva: Jún 5, 2013
Milyen motort érdemes használni, ami olcsón beszerezhető. Ebay is játszik, illetve használt is.
Lehetőleg 4-5 volt elég legyen neki, maximum 6.
Én léptetőmotorral csinálnám. A nyomatékigényét a mechanika, a kamera tömege és a pálya szöge adja. Árral kapcsolatban nem tudok segíteni.
Hmm, ha a kőbaltát ismernéd, azzal csinálnád?
 Nem olyan ördögtől való a mikrokontroller sem, hallottam már olyanról, aki meg tudta tanulni. Nem olyan ördögtől való a mikrokontroller sem, hallottam már olyanról, aki meg tudta tanulni. AVR, Arduino ügyben rengeteg részletes magyar infó is van a kezdéshez, egy párszáz forintos kontroller ki tud váltani 1-2 asztalnyi TTL ic-t.. Egy ilyen vezérlés megírása arduinora vagy bascom-avr-ben szerintem pár hét alatt összehozható nulláról. Hidd el, ha egyszer rászánod az időt, energiát, nem fogod megbánni, legfeljebb azt, hogy nem korábban kezdted...
Azért nem kell ennyire tulozni......messze nem kell hozzá egy asztalnyi TTL IC - mindössze talán kettö (de a másiknak a fele már üres lesz
)Mig a kolléga kiizzad egy Arduino programot (mert ahhoz is meg kell értenie a müködési elvet) addig talán össze tud drotozni 2 TTL IC-t meg 1 vagy két 555-st. Primary. Neked elöször ki kellene találnod az áttételeket a motrot stb. (a régi Floppy, CD mechanikák kazettamozgatojában szokott ilyen kis léptetö motor lenni. Ha be tudod irni a googleba, biztosan talál neked egy marokkal, amit már csak meg kell venni. Ha idáig eljutottál fogod tudni, hogy mennyit forog a motor (fordulatonként mennyivel mozdul el a dob), és kb. az elemi iskola 5-6. osztálýban biztos megmondták, hogyan kell a kör kerületét kiszámitani, amiböl egyböl kiderül, hogy a dob 1 fordulatával hány cm kötelet mozgatsz meg. Nem akarom folytatni... Ha ez megvan, akkor már tudod, hogy hány lépést kell a motornak megtennie - és pontosan ugyanennyi impulzus kell megszámolnod. Söt megsugom, a google talál néhány DIY projektet is (de nem fogom elárulni, hogy hol, legyen ez az elsö kihivás az életedben..... )
Nem mondtam, hogy a feladathoz egy asztalnyi ttl kéne, csak hogy a kontroller annyit helyettesíthet.
Erre a feladatra egyáltalán nem túlzás. A hardvert pár óra alatt összedobom, a kontroller mellé csak 4 fet kell ami meghajt egy unipoláris léptetőmotort, vagy egy, ami pwm-ben hajt egy dc motort. Raknék rá egy LCD-t, és egy encodert, amivel lehet állítani az időzítéseket, és a távkioldóval vezérelné a fényképezőt is. Ezt már kicsit macerásabb lenne megcsinálni ttl-ekkel. 1996-ban a suliban még élveztem is, amikor összedrótoztunk ttl-ekből valamit, és működött, csak azóta volt már némi fejlődés. Ha bármi módosítás kell, akkor a szoftver percek alatt átírható, vagy akár a hardver is bővíthető érzékelőkkel, kameraforgatóval. Nem azt mondom, hogy tűzre kell vetni minden ttl ic-t, csak azt, hogy érdemes nekiállni megtanulni a mikrokontrolleres dolgot is, a saját életét könnyíti meg az ember vele nem kicsit. A programozást csak egyszer kell megtanulni, utána egy ilyet egy óra alatt összekalapál az ember.
Kiszámolom mekkora nyomaték kell, illetve fordulat.
Egy léptető motornál meg van adva egy frekvencia, akkor az a körbefordulás frekvenciája, vagy pedig a lépéseké. Mondjuk nekem a körbefordulás a logikus. Ezt egyenlőre TTL IC-kel szeretném megépíteni, de ha befejeztem a vizsgákat meglátom, hogy belevágok-e az AVR-be. (AVR atmega 128-at fogok tanulni a későbbiekben)
Mutasd csak azt az adatlapot! Nem fok/lépés lesz az?
A hozzászólás módosítva: Jún 6, 2013
Szia!
Tudom az elején kikötötted, hogy mikrovezérlő nem, de ha egy pillantást vetsz a Parsic programra és PIC mellett döntesz, nem fogsz csalódni. Ami feladatot leírtál az említett programmal (ismerkedéssel együtt) nem tart egy fél napnál tovább, és csak egy pár alkatrészt tartalmaz a PIC-en kívül. Ami időt a sok alkatrészből adódó nyák tervezésére fordítanál, annyi idő alatt kész vagy az egésszel. Mostanában én is foglalkoztam time lapse felvételekkel. Szenzációs élmény visszanézni az eredményt. Eredményes tervezést és sok szép felvételt. Üdv: Gábor
Ez az: http://robocraft.ru/files/datasheet/28BYJ-48.pdf
itt láttam
Számoltam.
Ha 45 fokos szögben van a pálya, és 1 kg-ot kell emelni, akkor 4 cm átmérőjű tengelynél 0,15 Nm kell. Ehhez kell nyilvánvalóan egy áttétel, mert túl sokat haladna egy fordulattal. A tengely 1 fordulatnál a 4 cm átmérőjű dobon kicsit több, mint 125 mm-t halad. Ha 1:250 áttételt csinálok, akkor a motor egy fordulatával fog 0,5 mm-t haladni az egész. A motornak elég 0,6*10^-3 Nm nyomaték. 1 cm haladás 20 fordulat a motornak, ezt meg csak le tudja lépni 1-2 másodperc alatt. Ez még a két dolcsis ebay motor is produkálja. Tápnak szerintetek mennyire elegendő 4 db ceruza akksi? 4,8 V körüli táp elég az IC-knek és a motornak? Ha egy Proteusban összerakott elrendezés működik a szimulációban, akkor az jó esélyjel működik a valóságban? Mi a véleményetek?
Hát igen...az egyiket érteni vélem: adott léptetési frekvenciához megadták a nyomatékát, vélhetőleg a névleges 5V-tal táplálva. De hát egy ilyen korlát nem fog ki rajtunk, nemde? Úgy látom, feleslegesen írok neked.
A hozzászólás módosítva: Jún 6, 2013
Szóval, 120Hz az a lépések frekvenciája. 8 lépésből fordul körbe?
ha jól értem 34,4 Nmm 15 fordulat/másodpercnél? Bocs, hogy értetlen vagyok, de eddig nem volt dolgom léptetőmotorokkal. Kezdő vagyok a témában. Ezért kértem segítséget. Idézet: „Rated voltage : 5VDC Number of Phase 4 Speed Variation Ratio 1/64 Stride Angle 5.625° /64 Frequency 100Hz DC resistance 50Ω±7%(25℃) Idle In-traction Frequency > 600Hz Idle Out-traction Frequency > 1000Hz In-traction Torque >34.3mN.m(120Hz) Self-positioning Torque >34.3mN.m Friction torque 600-1200 gf.cm Pull in torque 300 gf.cm Insulated resistance >10MΩ(500V) Insulated electricity power 600VAC/1mA/1s Insulation grade A Rise in Temperature <40K(120Hz) Noise <35dB(120Hz,No load,10cm) Model 28BYJ-48 – 5V” pontosan mit takar a Frequency: 100Hz, illetve a In/out traction freq 600/1000Hz? A hozzászólás módosítva: Jún 6, 2013
Látom , hogy mennyire szenvedsz mindennel a mechanikátol kezdve az elektronikáig.
Helyetted elmennék az elsö játékboltba valamilyen kis fémépitökészletért, amiböl megépened a mechanizmust ( még motor nélkül). Ez legyen az alap - mindenképpen erre kell egy áttétel ( hacsak nem szerzel egy léptetö motort, amiben ez már be van épitve ( nekem olyant sikerült vennem, ami 780 lépést igényel egy fordulathoz. Azaz ennyi mpulzust kell generálnod, azaz 125 mm = 780 impulzus. Egy ilyen motor több kilot képes mozgatni függölegesen - ami több mint elég, söt nagyobb dobra is tekerheted a madzagot, ha ugy jobban megfelel. A te esetedben , mindössze a két állás közötti szakaszokkal kell foglalkoznod, igy olyan dobot kellene választanod ami a legnagyobb lépéseknek felel meg. Igy ha kiengeded a 780 impulzust, akkor a kamera a legnagyobb lépést teszi meg. Hogy miyen gyorsan, ez az impulzusok frekijétöl függ - azaz, ha 1 mp. alatt adod ki öket, akkor egy másodperc alatt megy 125 mm-t. Itt el kell döntened hogy mennyi elég ( ez szerintem tul gyors). Lassitani mindig lehet! Bármilyen lassura! Azaz ezzel meghatároztad a max. lépéstávolságot 125 mm és a leggyorsabb mozgást ( fent 1 sec). Egy más motorral ugyanezen kell átragnod magad. A motorod 64 lépesben fordul 360 fokot, 1 külsö 1:10 áttélellel ( épitökészlet) lelassitja a dobot azaz 640 impulzus = 125 mm . Ha ezt 1 sec alatt akarod megtenni, akkor még éppen beleférsz a speckoba (>600Hz terhelés alatt). Ennyi a feladat. 555-l megcsinálsz egy impulzusadot, aminek a max. frekije 640 Hz. Ezzel meg van oldva a sebesség és az idö. Ezt bevezeted egy programozhato számláloba, amibe a startkor beirsz 640-t (vagy kevesebbet) a regiszterbe és az pontosan annyi impulzust fog a motor meghajtojába engedni egy ciklus alatt. Mindössze ennyit kell tenned. Bármilyen, számodra szimpatikus modon.
Kezd világos lenni. Nekem a léptető motor lelki világa nem volt tiszta. Az elektronika részét nagyrészt már értem.
A frekvencia a lépések frekvenciáját jelenti. Tehát a linken található motor elvileg megbirkózik a másodpercenkénti 640 impulzussal, azaz 10 fordulat/s-re képes. Ha feleannyit akarok haladni, akkor 320 impulzust adok neki. Milyen motort javasoltok, mert hiába férek bele a specifikációkba, a keresgélésem során több helyen is írták, hogy 13-15 rpm-re képes, ami 0,25 fordulat/s . Lehet, hogy kicsit nagy fába vágtam a fejszét, de most már megküzdök vele.
Nézz át a CNC-s topikokba, ott kapsz tippeket a motorokra.
Az viszont egy kicsit gyanus, hogy 10-15 rpm-s motorokat találtál, mert a többség >200-300 rpm-nél többet tud. (Lehet, hogy a másodpercenkénti ford. számot mondták).
Írtam a CNC házilag topicba. Remélem tudnak segíteni.
Itt olvastam: http://forum.arduino.cc/index.php?PHPSESSID=683cts7q0vc40v5tdjom2l8...5335.0 http://www.youtube.com/watch?v=asv5-kYzSsE
Ez valoban 14 rpm-t tud, de ebben már áttétel van! Maga a motor biztos hogy 10x - 20x gyorsabban forog.
Keresgettem.
A Conradnál van 7000-ért egy, ami 1,6 Ncm-t tud és 3,3 Volt a néveleges feszültsége. Gondolom ez már tud tisztességes fordulatszámot. A másik, amit néztem, ebayes NEMA 17 szállítással kb 4000-ért. Ez 2 Ncm-t tud és 3,4 Volt a néveleges feszültsége. http://www.conrad.hu/conrad.php?name=Products&pid=198621 http://www.ebay.com/itm/CNC-Nema17-Stepper-Motor-2-Phase-DC3-4V-1-7...dcbc5e 1:80 áttétellel már elvileg ellensúly nélkül is elmenne éppen. A tartó nyomatékot értem, hogy mi. Ezt milyen feltételekkel tudja produkálni? |
Bejelentkezés
Hirdetés |