Fórum témák
- • Szárítógép problémák
- • Robotfűnyíró vagy fűnyíró robot
- • Rádiótechnika számok keresése
- • Lézer érzékelő
- • Erősítő mindig és mindig
- • Napelem alkalmazása a lakás energia ellátásában
- • Számítógép hiba, de mi a probléma?
- • Transzformátor készítés, méretezés
- • Porszívó javítás
- • Rendelés külföldről (eBay - Paypal)
- • Szobatermosztát bekötése
- • Arduino
- • Fejhallgató erősítő
- • Sárga Kazettás Piaci Nintendo (8bit)
- • Klíma beszerelése, fűtés-hűtés házilag
- • Hűtőgép probléma
- • Kutya macska (vad) riasztó
- • FET vezérlése
- • Muzeális készülékek-alkatrészek restaurálása
- • Oszcilloszkóp, avagy hogyan kell használni?
- • Toroid transzformátor
- • LCD TV probléma
- • Elektromos távirányítós kapunyitó
- • Videomagnó problémák
- • SMD forrasztás profin
- • Érdekességek
- • CNC építése házi alkatrészekből az alapoktól
- • Ki hol gyártatja a NYÁK-ot ?
- • Felajánlás, azaz ingyen elvihető
- • Kazettás magnó (deck) javítása
- • HESTORE.hu
- • Hibrid erősítő
- • Borhűtő vezérlő panel
- • Karácsonyi fényfüzérek
- • Mosogatógép hiba
- • PC táp átalakítás
- • LED-es világítás
- • Kombikazán működési hiba
- • Áramlökés határoló lágyindító
- • Rádió adó építése
- • Akkus lámpa javítás
- • Villanyszerelés
- • Elektromos tolókapu
- • Villanypásztor
- • Li-Po - Li-ion akkumulátor és töltője
- • Gondolkodó ház avagy házautomatizálás
- • Mikrohullámú sütő javítás, magnetron csere, stb.
- • Kapcsolási rajzot keresek
- • Műhelyünk felszerelése, szerszámai
- • Rádióamatőrök topikja
- • Villanymotor mi a hiba?
- • Eredményjelző
- • Számítógép tápegység
- • ARM CPU assembler programozás
- • Autórádió (fejegység) problémák, kérdések, válaszok
» Több friss téma
|
Fórum » AVR - Miértek hogyanok
WinAVR / GCC alapszabályok:
1. Ha ISR-ben használsz globális változót, az legyen "volatile"
2. Soha ne érjen véget a main() függvény
3. UART/USART hibák 99,9% a rossz órajel miatt van
4. Kerüld el a -O0 optimalizációs beállítást minden áron
5. Ha nem jó a _delay időzítése, akkor túllépted a 65ms-et, vagy rossz az optimalizációs beállítás
6. Ha a PORTC-n nem működik valami, kapcsold ki a JTAG-et
Bővebben: AVR-libc FAQ
Hát, itt csatolok egy kódot, ami szoftverből programozza az AVR-t.
Ha megvan a lelkesedés és van fusebit doctorod, amivel korrigálod a szoftverhibákat, akkor rajta. Kezdetben mondjuk csak a signature-t olvasd ki, azzal kisebb valószínűséggel pusztítod szét az IC-t, mintha elsőre fuse-biteket írogatnál SPI-vel.
 A hozzászólás módosítva: Szept 30, 2013
Ezt hogyan tölti fel?
adamtui_93: Mindjárt megnézem a kódot.
Ez az Arduino ISP programozójának forrása. A hogyan tölti fel, az egyáltalán nem érdekes, kizárólag ha szeretsz horrorsztorikat olvasni. A lényeg viszont szépen kivehető, hogy mit küldj az SPI-n a fuse bitek megváltoztatásához.
Rendeltem időközben egy másik tiny13-at. De arra gondoltam hogyha figyelem egy másik avr-el a MISO lábát az új tinynek programozás közben és azt az adatot ráküldöm erre csak lassabb akkor elméletileg működni-e kell nem?
SPI-n nincs késleltetés. Az I2C-n tudod lassítani a kommunikációt azzal, hogy az SCK lábat alacsonyban tartod, de SPI-n nem.
SPI alatt a mester (programozó) adja az órajelet. Kiküldi, hogy mit akar, ezzel _egyidőben_ beolvassa a választ.
Magyarul a programozó kiküld 4 byte-ot, az utolsó 3 byte-ot pedig egyidőben a küldéssel olvassa.
/* * Functions specific to ISP programming of an AVR */ uint16_t spi_transaction (uint8_t a, uint8_t b, uint8_t c, uint8_t d) { uint8_t n, m; SPI.transfer(a); n = SPI.transfer(b); //if (n != a) error = -1; m = SPI.transfer(c); return 0xFFFFFF & ((n<<16)+(m<<8) + SPI.transfer(d)); } byte SPIClass::transfer(byte _data) { SPDR = _data; while (!(SPSR & _BV(SPIF))) ; return SPDR; }
A hozzászólás módosítva: Okt 1, 2013
Bár számomra továbbra sem tiszta, hogy miért nem avrdude alatt programozod fel -b19200-zal.
Letöltöd az avrdude-t, az avr8-burn-o-mat-ot és az additional options-ök közé beírod a -b19200-at.
Sziasztok. Most kezdenék komolyabban foglalkozni AVR-rekkel és nagy kérdés, hogy vegyek-e Tbird-öt (ezt használjuk egyetemen) vagy elég a Topi féle AVR dopper is. Ahogy eddig néztem Jtag előnye hogy lehet vele debugolni de az ISP-s programozó meg több avr-hez használható. Szerintetek melyiket érné meg jobban? Árban kb ugyan annyira jönnék ki ha magam építem.
Én a Dragont használom a legnagyobb megelégedés mellett. Csak ajánlani tudom.
TBIRD-et en elfelejteném.
Inkább Dragon, mert azon ott az ISP, HVPP/HVSP, JTAG és dW is...
És valami egyszerű M128-as panelt mellé...
Doper meg felejtős, az emulált USB miatt (+driver+firmware+AVRStudio 6.1 támogatásának korlátai miatt)
A Doper és a TBird azért nem egy árkategória....
Jó, kicsit túloztam. A doper kijön 2-3000ből +még egy mega128-as panel, ami tudja azt mint a Tbird és máris 8k körül van azért ez is
Ez a Dragon jól néz ki meg minden, csak hát az árát is elkérik elég rendesen 
A Doper tényleg ennyire használhatatlan? Elég sokan írták hogy megépítették. A driveres problémák AVRStudio4-nél is vannak?
Esetleg egy STK500 vagy a TavIR AVRisp (ez nem ugyan az mint a doper  ) jobb lenne?
STK500 - hardware usb-soros átalakító + egy AVR chip ami _hardware_ alapon kezel mindent.
TavIR AVRisp: A klasszikus AVR910-es hardware programozó. Csak nem RS232 sorosport, hanem FT232 USB-soros átjáróchippel.
Ugyanitt van JTAGICE is...
Tanulni akarsz? Játszadozni? Suliba kell, csak drága a TBird?
Mi a cél pontosan?
Dopernél az _emulált_ USB okoz problémát. De semmi jónak nem vagyok elrontója, mindenki a saját kárán tanul (én is így jártam... ).
Igazából mind a három a cél egyszerre. Suliba most Tbird-öt használunk de nekem nem tetszik se az ára se maga a kivitele ezekkel a szalagkábeles csatlakozókkal (már meg is van tervezve egy saját próbapanel). De szeretnék komolyabban is foglalkozni vele, nem csak amit vizsgára elvárnak.
Tipp:
TBird-et próbálj meg használtan begyűjteni - hamár a suliban alapelvárás. Sok szívástól véded meg magadat (felesleges körök).
És én debugos programozóra a Dragont tippelném - bár amennyi debug kellett az elmúlt 6 év alatt . Sima sorosport sokszor elég + a JTAGICE (ami a TBird-en van). És persze saját áramkörök - Arduino alapon.
De az induláskor használt az egyenpanelt, amit mindenki a suliban... (javaslat).
Ha kinövöd:
1, sajátot tervezel úgyis
2, TBird-et meg elpasszolod - az ára visszajön.
Sziasztok!
ATmega168-ra kötöttem egy DS18B20-at, és egy kijelzőre szeretném kiírni az értékét. Amit kiír nekem folyamatosan +127.9375 C. Megtudja nekem valaki mondani hogy mit rontottam el?
/* * lcdmenu.c * * Created: 2013.07.11. 16:03:42 * Author: Pézsma */ #include <avr/io.h> #include <avr/eeprom.h> #include <avr/pgmspace.h> #include <avr/interrupt.h> #include <util/delay.h> #include <inttypes.h> #include <stdio.h> #include <stdlib.h> #include <string.h> #include "lcd.h" #define F_CPU 8000000UL /* Thermometer Connections (At your choice) */ #define THERM_PORT PORTC #define THERM_DDR DDRC #define THERM_PIN PINC #define THERM_DQ PC0 #define THERM_INPUT_MODE() THERM_DDR&=~(1<<THERM_DQ) #define THERM_OUTPUT_MODE() THERM_DDR|=(1<<THERM_DQ) #define THERM_LOW() THERM_PORT&=~(1<<THERM_DQ) #define THERM_HIGH() THERM_PORT|=(1<<THERM_DQ) #define THERM_CMD_CONVERTTEMP 0x44 #define THERM_CMD_RSCRATCHPAD 0xbe #define THERM_CMD_WSCRATCHPAD 0x4e #define THERM_CMD_CPYSCRATCHPAD 0x48 #define THERM_CMD_RECEEPROM 0xb8 #define THERM_CMD_RPWRSUPPLY 0xb4 #define THERM_CMD_SEARCHROM 0xf0 #define THERM_CMD_READROM 0x33 #define THERM_CMD_MATCHROM 0x55 #define THERM_CMD_SKIPROM 0xcc #define THERM_CMD_ALARMSEARCH 0xec #define THERM_DECIMAL_STEPS_12BIT 625 //.0625 uint8_t therm_reset(){ uint8_t i; //Pull line low and wait for 480uS THERM_LOW(); THERM_OUTPUT_MODE(); _delay_us(480); //Release line and wait for 60uS THERM_INPUT_MODE(); _delay_us(60); //Store line value and wait until the completion of 480uS period i=(THERM_PIN & (1<<THERM_DQ)); _delay_us(420); //Return the value read from the presence pulse (0=OK, 1=WRONG) return i; } void therm_write_bit(uint8_t bit){ //Pull line low for 1uS THERM_LOW(); THERM_OUTPUT_MODE(); _delay_us(1); //If we want to write 1, release the line (if not will keep low) if(bit) THERM_INPUT_MODE(); //Wait for 60uS and release the line _delay_us(60); THERM_INPUT_MODE(); } uint8_t therm_read_bit(void){ uint8_t bit=0; //Pull line low for 1uS THERM_LOW(); THERM_OUTPUT_MODE(); _delay_us(1); //Release line and wait for 14uS THERM_INPUT_MODE(); _delay_us(14); //Read line value if(THERM_PIN&(1<<THERM_DQ)) bit=1; //Wait for 45uS to end and return read value _delay_us(45); return bit; } uint8_t therm_read_byte(void){ uint8_t i=8, n=0; while(i--){ //Shift one position right and store read value n>>=1; n|=(therm_read_bit()<<7); } return n; } void therm_write_byte(uint8_t byte){ uint8_t i=8; while(i--){ //Write actual bit and shift one position right to make the next bit ready therm_write_bit(byte&1); byte>>=1; } } void therm_read_temperature(char *buffer){ // Buffer length must be at least 12bytes long! ["+XXX.XXXX C"] uint8_t temperature[2]; int8_t digit; uint16_t decimal; //Reset, skip ROM and start temperature conversion therm_reset(); therm_write_byte(THERM_CMD_SKIPROM); therm_write_byte(THERM_CMD_CONVERTTEMP); //Wait until conversion is complete while(!therm_read_bit()); //Reset, skip ROM and send command to read Scratchpad therm_reset(); therm_write_byte(THERM_CMD_SKIPROM); therm_write_byte(THERM_CMD_RSCRATCHPAD); //Read Scratchpad (only 2 first bytes) temperature[0]=therm_read_byte(); temperature[1]=therm_read_byte(); therm_reset(); //Store temperature integer digits and decimal digits digit=temperature[0]>>4; digit|=(temperature[1]&0x7)<<4; //Store decimal digits decimal=temperature[0]&0xf; decimal*=THERM_DECIMAL_STEPS_12BIT; //Format temperature into a string [+XXX.XXXX C] sprintf(buffer, "%+d.%04u C", digit, decimal); } int main(void) { lcd_init(); // kijelző beállítása _delay_ms(100); lcd_contrast(0x20); // pixel erősség beállítása PORTD |=0b11111111; // felhúzzuk a gombokat tápra while(1) { char x[10] = {0}; therm_read_temperature(x); lcd_clear(); lcd_goto_xy(1,1); lcd_str(x); _delay_ms(1000); } //end while } //end main
A hozzászólás módosítva: Okt 5, 2013
Ezzel a kóddal én is próbálkoztam: Bővebben: Link
Aztán sajátba kezdtem: Bővebben: Link
Olvasd el azt is amit írtak hozzá. Most már "jól" működik.
Köszönöm szépen, megpróbálom.
Sziasztok!
PT100-at kötnék avr ADC bemenetre egyszerű feszültség osztóval jó vagy keresek más megoldást?
Szia!
Nem lesz ilyen egyszerű.
Max csak 1mA folyhat rajta keresztül.
Ha 5V a tápod, akkor kb 5,1k ellenállást kell vele sorbakötnöd.
20°C - 107,79 Ohm sorba kötve az 5,1k ellenállással 103,5mV kimenet.
30°C - 111,67 Ohm sorba kötve az 5,1k ellenállással 107,1mV kimenet.
Azaz 10°C változásra 3,6mV változásod lesz.
Az ADC felbontása 5V referencia esetén kb. 4,9mV.
Tehát 14°C változás fog 1 ADC érték változást eredményezni.
Megoldás az, hogy ezt a feszültséget felerősíted.
Ez az emulált USB szerintem meg sem született volna soha, ha lenne DIP-es USB-s AVR IC.
Igazából én gondolkozom, hogy érdemes-e PIC-es mikrokontrollert használni USB-re, mert a Microchipnek vannak ilyen IC-i. Ha valakinek van tapasztalata velük, érdekelne.
Én vennék az AVR-hez próbapanelt és raknék rá tüskesort, és akkor az is kiépíthető. Nekem egy elektromérnök azt mondta hogy komoly eszközökben nem célszerű PIC-et használni mert szerinte nem megbízható. Az én iparágamban csak Philips vagy Atmel kontrollerekkel találkoztam. Van olyan gép hogy ha rádugod a pendrive-ot akkor az USB-s AVR újraírja a többit.
Idézet:
„...komoly eszközökben nem célszerű PIC-et használni mert szerinte nem megbízható.” Nem tudom ezt honnan veszi az a mérnök, mivel az AVR is pont olyan mikrovezérlő, mint a PIC, sőt a PIC-ek még sokkal hamarabb is megjelentek mint az AVR-ek.
Szerintem pedig a PIC-ek jobbak, meg amúgy is eddig több eszközben találkoztam velük, mint AVR-el. A másik előnye a PIC-eknek, hogy sokkal nagyobb a választék a mikrovezérlők terén.
-1
Ez nettó hülyeség. Valószínű hogy az illető AVR-ekhez sem ért. Ha már ipari cucc:
868MHz-es rádió paneleket (is) gyártunk. Az adóban AVR van, a vevőben PIC.
Annyi biztos hogy az AVR sleep módban nagyon keveset eszik az elemes adóáramkörben,
míg a vevőben lévő PIC állandóan ketyeg, de nem gond mert hálózatról megy...
Egy védődiódás kérdésem lenne.
A P-csatornás MOSFET alapból úgy készül el, hogy D->S a kapcsolható rész, S->D az dióda.
( IRF9Z34, Continuous Source-Drain Diode Current -18A)
Ha mondjuk 12V-on motort kapcsolgatok (12V -> pfet -> motor -> 0V), akkor kihasználható-e az, hogy úgyis ott van a MOSFET ellentétes irányú diódája, egy kicsit megugrik a feszültség 12.7V-ra, de az mind befolyik a VDD-re.
Kell-e védődióda, ha a MOSFET-ben egyébként is benne van? (nem egy kellene, hanem 32, ezért ha lehet kihagynám) A hozzászólás módosítva: Okt 8, 2013
A motorbol a VDD fele hasznalhatod, persze. De az ellen semmi nem ved, amikor a motor minuszba megy el (akár csak egy impulzusnyi idore), azaz a FET-ed drain-jet leviszi minusz akarhany voltra. Ha azt a feszultseget hozzaadaod a VDD-hez, akkor megkapod, hogy mennyi van a D es S kozott. Annak nem kellene atlepni a 60 voltot. Szoval a motorral parhuzamosan egy forditott dioda hasznos lehet.
Kihagyhatod?
De akkor úgy tervezd meg, hogy roncsolás nélkül tudjál Feteket cserélni!
Mert az egész áramkört cserélni drága kísérlett lesz!
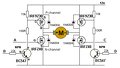
A kérdés H bridge-re vonatkozott, csak kissé ügyetlenül tettem fel:
A diódák eleve benne vannak a fet-ekben, akkor a külső dióda ( 1N4004) mennyi pluszt tesz hozzá az áramkörhöz? A hozzászólás módosítva: Okt 8, 2013
Az 1N4004 pár grammot, de azon kivul semmit, mert aramban kisebb es szerintem lassabb is, mint a FET body diodaja. Szoval, ha ilyen H-Bridge-ed van, akkor szerintem a kulso 1N4004 teljesen felesleges. Olyat mar lattam (digitalis vegfokokban), hogy Schottky dioda volt parhuzamosan a FET-tel, mert eleve kisebb a nyitofeszultsege, es iszonyu gyors, tehat a tuskek ellen megvedi a FET-et. A hozzászólás módosítva: Okt 8, 2013
Sziasztok!
Adott egy tbird2 ( Bővebben: Link) és a hozzá tartozó kiegészítő panel ( Bővebben: Link).
Szeretnék olyan programot írni C-ben, amely a teljes processzoridő felhasználása nélkül a 4db 7 szegmenses kijelzőkön tart bizonyos értékeket, miközben más feladat is végrehajtódhat.
Az A port ilyen formában értelmezi a bináris adatot: XYYYZZZZ, ahol X az engedélyezés, Y a 4 kijelző valamelyikének címe, a Z pedig a tényleges számadat
Jelenleg az alábbi kód végzi a dolgát:
void szegmBIN(unsigned int z) { int k; unsigned char x[4],i,j=25; //j-szer gyújtjuk ki mind a 4 szegmenst //integer számjegyeit tömb elemeibe teszem. for(i=0,k=1;i<4;i++,k=k*10) x[i]=(z/k)%10; // 4 db számjegy //4 digit kijelzése j alkalommal (j*20 msec) while(j--) // a kijelzés 25*5*4=500 msec { for(i=0;i<4;i++) { PORTA=128+(i<<4)+x[i]; //digitek kijelzése _delay_ms(5); } } } int main() { unsigned int x=1111; DDRA=0xFF; while (1) szegmBIN(x); //folyamatosan kiírja: 1111 return 0; }
A 7 szegmenses kijelzőkön olvasható adat csak alkalmanként szorulna frissítésre, addig pedig folyamatosan meg kell jelenjen.
Hogyan tudnám hatékonyabbá tenni a kódot?
edit: linkek A hozzászólás módosítva: Okt 8, 2013
Használni kell az időzítő megszakítását. Pl:
// órajel forrás frekvencia (most 16MHz) #define TimerSrcClock (1UL*16000000) // 200 megszakítás/sec (5msec) #define TIMECLK 200 #include <avr/io.h> #include <avr/interrupt.h> #include <string.h> #include <stdlib.h> volatile unsigned char x[4]; // ez kerül a kijelzőre ISR (TIMER1_COMPA_vect) { static unsigned char y = 0; // aktuális karakter (0..3) PORTA &= ~(1 << 7); // kijelzés ki PORTA = (y << 4) + x[y}; // karakter cím és érték ki PORTA |= (1 << 7); // kijelzés be y++; if (y > 3) y = 0; } void timerinit(void) { // időzítő inicializálása #define TIMEDIV ((TimerSrcClock+TIMECLK/2)/TIMECLK-1) #if TIMEDIV < 65536 #define TMCLKDIV 1 #define TMCLKSEL 1 #elif TIMEDIV < (65536*8) #define TMCLKDIV 8 #define TMCLKSEL 2 #elif TIMEDIV < (65536*64) #define TMCLKDIV 64 #define TMCLKSEL 3 #elif TIMEDIV < (65536*256) #define TMCLKDIV 256 #define TMCLKSEL 4 #elif TIMEDIV < (65536*1024) #define TMCLKDIV 1024 #define TMCLKSEL 5 #endif // TIMEDIV #define TMCOMP (((TimerSrcClock/TMCLKDIV)+TIMECLK/2)/TIMECLK-1) OCR1AH = TMCOMP >> 8; // comparator HI OCR1AL = (unsigned char)TMCOMP; // comparator LO TCCR1A = (0<<WGM10); // mode4 (CTC) TCCR1B = (1<<WGM12)|(TMCLKSEL<<CS10); // mode4, Clk = ClkIO/1..8..64..256..1024 #ifdef TIMSK1 TIMSK1 = (1<<OCIE1A); #else // TIMSK1 TIMSK |= (1<<OCIE1A); #endif // TIMSK1 sei(); } int main(void) { int k; unsigned char i; unsigned int z = 1111; for(i=0,k=1;i<4;i++,k=k*10) x[i]=(z/k)%10; // 4 db számjegy DDRA=0xFF; timerinit(); while (1) { // ide mehet bármi, a megszakításból folyamatosan frissül a kijelző } }
A hozzászólás módosítva: Okt 8, 2013
Sziasztok!
Legalább egy napom már ráment az Atmel által publikált TWI driverek működésre bírásával.
Lassan kívülről fújom a doksit is és a kódot is. Miért nem működik? Mit nézek el?
Adó:
#define F_CPU 16000000UL #include <avr/io.h> #include <avr/interrupt.h> #include <util/delay.h> #include "TWI_Master.h" #define TWI_GEN_CALL 0x00 // The General Call address is 0 // Sample TWI transmission commands #define TWI_CMD_MASTER_WRITE 0x10 #define TWI_CMD_MASTER_READ 0x20 // Sample TWI transmission states, used in the main application. #define SEND_DATA 0x01 #define REQUEST_DATA 0x02 #define READ_DATA_FROM_BUFFER 0x03 unsigned char TWI_Act_On_Failure_In_Last_Transmission ( unsigned char TWIerrorMsg ) { // A failure has occurred, use TWIerrorMsg to determine the nature of the failure // and take appropriate actions. // Se header file for a list of possible failures messages. // Here is a simple sample, where if received a NACK on the slave address, // then a retransmission will be initiated. if ( (TWIerrorMsg == TWI_MTX_ADR_NACK) | (TWIerrorMsg == TWI_MRX_ADR_NACK) ) TWI_Start_Transceiver(); return TWIerrorMsg; } #define SW1 !(PINB & (1<<PINB0)) void PortIrany() { PORTB |= (1<<PB0); //felhúzóellenállás be } int main(void) { PortIrany(); unsigned char messageBuf[TWI_BUFFER_SIZE]; unsigned char TWI_targetSlaveAddress = 0x10; unsigned char TWI_operation=0; TWI_Master_Initialise(); sei(); while(1) { if(SW1) { messageBuf[0] = (TWI_targetSlaveAddress<<TWI_ADR_BITS) | (FALSE<<TWI_READ_BIT); messageBuf[1] = 0; TWI_Start_Transceiver_With_Data( messageBuf, 2 ); _delay_ms(500); messageBuf[0] = (TWI_targetSlaveAddress<<TWI_ADR_BITS) | (FALSE<<TWI_READ_BIT); messageBuf[1] = 1; TWI_Start_Transceiver_With_Data( messageBuf, 2 ); _delay_ms(500); } if ( ! TWI_Transceiver_Busy() ) { // Check if the last operation was successful if ( TWI_statusReg.lastTransOK ) { if ( TWI_operation ) // Section for follow-up operations. { // Determine what action to take now if (TWI_operation == REQUEST_DATA) { // Request/collect the data from the Slave messageBuf[0] = (TWI_targetSlaveAddress<<TWI_ADR_BITS) | (TRUE<<TWI_READ_BIT); // The first byte must always consit of General Call code or the TWI slave address. TWI_Start_Transceiver_With_Data( messageBuf, 2 ); TWI_operation = READ_DATA_FROM_BUFFER; // Set next operation } else if (TWI_operation == READ_DATA_FROM_BUFFER) { // Get the received data from the transceiver buffer TWI_Get_Data_From_Transceiver( messageBuf, 2 ); //PORTB = messageBuf[1]; // Store data on PORTB. TWI_operation = FALSE; // Set next operation } } } else // Got an error during the last transmission { // Use TWI status information to detemine cause of failure and take appropriate actions. TWI_Act_On_Failure_In_Last_Transmission( TWI_Get_State_Info( ) ); } } } }
Vevő:
#include <avr/io.h> #include <avr/interrupt.h> #include "TWI_slave.h" // Sample TWI transmission commands #define TWI_CMD_MASTER_WRITE 0x10 #define TWI_CMD_MASTER_READ 0x20 //Led #define LedBe PORTB |= (1<<PB0) #define LedKi PORTB &= ~(1<<PB0) unsigned char TWI_Act_On_Failure_In_Last_Transmission ( unsigned char TWIerrorMsg ) { // A failure has occurred, use TWIerrorMsg to determine the nature of the failure // and take appropriate actions. // Se header file for a list of possible failures messages. // This very simple example puts the error code on PORTB and restarts the transceiver with // all the same data in the transmission buffers. PORTB = TWIerrorMsg; TWI_Start_Transceiver(); return TWIerrorMsg; } int main(void) { DDRB |= (1<<PB0); //PB0 kimenet uint8_t TWI_slaveAddress = 0x10; uint8_t messageBuf[1]; TWI_Slave_Initialise( (unsigned char)((TWI_slaveAddress<<TWI_ADR_BITS) | (FALSE<<TWI_GEN_BIT) ));//TWI indítás (slave cím megadás és általános hívás fogadásának engedélyezése) sei(); // Start the TWI transceiver to enable reception of the first command from the TWI Master. TWI_Start_Transceiver(); while(1) { if ( ! TWI_Transceiver_Busy() ) { if ( TWI_statusReg.RxDataInBuf ) { TWI_Get_Data_From_Transceiver(messageBuf, 1); if(messageBuf[0]==1) { LedBe; } if(messageBuf[0]==0) { LedKi; } } } } }
Mit nézek el?
kapcsolódó doksik:
AVR315: Using the TWI module as I2C master - Atmel Corporation Bővebben: Link
AVR311: Using the TWI module as I2C slave - Atmel Corporation Bővebben: Link A hozzászólás módosítva: Okt 9, 2013
|
|