Fórum témák
» Több friss téma |
Van mindenem, de nem igazán hiszem, hogy a valós életben úgy kezdenék az emberek, hogy felállítják a motor differenciálegyenletét, és az alapján tekergetik a potikat pl. az A300 vezérlőben (bár lehet még olyan emberrel sem találkoztam, aki ilyesmiket állítgat be
 ). Inkább valami visszafelé gondolkodásra gondoltam (mint a ajánlásban van), hogy a motor válasza alapján finomítani a paramétereket. ). Inkább valami visszafelé gondolkodásra gondoltam (mint a ajánlásban van), hogy a motor válasza alapján finomítani a paramétereket.
Megkerestem, nagyon tanulságos. Úgy látom gyakorlatilag csak pozíciószabályozás van és áramkorlát.
El is gondolkodtam még az elején, hogy hogyan csinálok ebből a PIC-es megoldásból Step/Dir vezérlőt. Ebben a megoldásban külön rutin intézi a mozgást ( a klasszikus trapéz forma, gyorsítással, lassítással), ezért úgy gondoltam minden step jelre mozgatok valamennyit (20-100 egységet). Azt nem tudtam mi fog ebből kisülni, mivel a Mach3-ban is van gyorsítás, lassítás beállítva. Lehet ezt az egészet ki kellene hagyni és csak a pozícióra szabályozni?
Ha szimulálni akarsz, akkor nem kerülheted meg, hogy a motor jellemzőit felhasználod a számítás során.
Velem azért elő szokott fordulni, hogy beállítok egy hajtást, és a gyakorlatban valóban nem így csináljuk. Ha nincs önoptimalizáció, akkor a szabályzó köröket belülről kifelé haladva egységugrás jellel szoktam beállítani. Ezek jellemzően analóg szabályzók, mind alárendelt áramszabályzóval szokták felépíteni. Ezeknél a szabályzóknál jellemző az egységugrásra adott válasz (legalábbis a folyamatos áram tartományban), a gépkönyvek is mindig ezt ajánlják. Emlékeim szerint két-három olyan szabályzóval futottam össze az utóbbi 10-20 évben, ami nem ilyen volt; A legutóbbi egy kínai csoda, egy pici (1-2kW-os) hajtás, egyetlen LM324-gyel. Nem gondolom, hogy korrektül be tudtam állítani. Aztán kettő francia hajtás volt a székesfehérvári könnyűfém egyik üzemében; az egyik fajta annyira kezelhetetlen volt, hogy lecserélték. A másik típusból több is volt, és azok egy kicsit nagyobb teljesítményűek (50-100kW) voltak, ezért azokat meg átalakítottuk. Még ma is mennek. Ránéztem erre az A300-ra. Ez sem alárendelt áramszabályzós, hanem külön hurkot hoz létre az áramkorlátozására. Lehet én vagyok nagyon megkövesedve, de nekem a kéthurkos szabályozást tanították, az ipari gyakorlatban is ez a jellemző, én egyenlőre továbbra is ezt gondolom a jobbnak. Az egyhurkos beállításának helyes módja a felnyitott kör elemzéséből derülne ki. Lehet hogy van ennek is szabályozástechnikai irodalma, de így elsőre nem emlékszem rá hogy összefutottam volna vele. Belenéztem a dr. Magyar Péter - dr. Lakatos Loránt: Áramirányítós rendszerek szabályozása jegyzetbe. Ők is ebből indulnak ki: "A szabályozott egyenáramú hajtások szinte minden esetben alárendelt áramszabályozási kört tartalmaznak". 160. old., és csak ezt elemzik. A hozzászólás módosítva: Jan 30, 2016
Miért nem jó úgy ahogy van?
És csak simán megépíted? Én most szeretném áttervezni az egészet SMD alkatrészekre. Az a vezérlő a gecko servo koppintása.
Igazából a programozás része tetszene, nem is biztos, hogy így használnám valamire. Az LS7184 tetszene, csak az ára nem. A pickes megoldásban PAL áramkört használnak, ami 20-30Ft, majd programoztatok egy párat, csak az sokkal nagyobb.
Most írtam egy rutint, amivel regisztrálni tudom a változókat és ebből próbálok kitalálni valamit a Ziegler-módszer szerint vagy az átmeneti függvény alapján.
Azt hiszem egy kicsit belezavarodtam. Milyen átmeneti függvényt kell felvenni? A PWM jelre teszek egy ugrást (0->100%) és pontosan mit kell ábrázolni, sebességet?
A Ziegler módszer szerint sikerült a lengéseket bemérni, de lehet leegyszerűsítem a számítást PI-re, csak át kell írni a progit.
Szia. Csak gondolkodom
Ha egy síma nyomtató a fejeket súlyban elviszi jobbra balra akkor egy kicsi lézer fejet is elbírhat. A fej vezérlését kellne ugy belőni mint mikor mondjuk fekete festékkel dolgozik és amikor fest akkor a lézer működjön. Igy akkor túl sok teendő sincs .. csak egy normál rajzot képet szöveget... kell "nyomtatni" és máris kész a lézer gravirozott minta... Lehet túl egyszerűen gondolom??
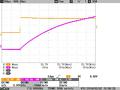
Én az alapjelet szoktam "ugratni", és a visszavezetett jel alakját nézem. Pl.: az áramszabályzó esetében az áramszabályzó bemenetére teszek egységugrás jelet (először csak kis amplitúdójút, ne menjen tönkre semmi), és szkópon nézem az áram alakját. Addig állítom amíg minimális túllövéssel áll be. Egy ilyen beállítási képet csatolok. Már nememlékszem hol vettem fel, valószínűleg egy tirisztoros talán körármos hajtás lehetett. (a lila az alapjel, a sárga a mért áram)
Az egyhurkos szabályzónál csak fordulatszám (vagy a megemlített A300 esetében csak pozíció) alapjeled van, ezt tudod ugratni. Mondjuk én ilyen esetben is inkább az áramot mérném. Annak lefolyása nekem beszédesebb. A hozzászólás módosítva: Feb 1, 2016
Amatőr módon én azt gondoltam, felveszem PWM ugrásra adott pozíció választ (szabályozás nélkül), de persze csak egy egyenest kaptam ( de legalább ebből megtudtam határozni a max. PWM-hez tartozó motorsebességet). Ezért gondoltam PWM - sebesség válasz diagramra, csak közben találtam egyéb problémákat is a programban.
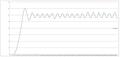
Gondolom ez csak a korábbi szintű szimuláció motor jellemzők nélkül. Elvileg nem így kellene felfutnia (ez eléggé lineáris), hanem exponenciálisan. Az elején őrült nagy áramnak kellene kialakulni, és ez intenzíven gyorsítaná a motort. Ahogy a belső feszültség emelkedik, az áram csökken, és így a gyorsulás mértéke is.
Ez nem szimuláció, hanem mérés (a vége csak azért vízszintes mert ott a pálya vége). Ezért gondoltam sebesség, vagy esetleg gyorsulás diagram felvételében.
Felvettem néhány hasonló görbét mire rájöttem, hogy hiba van az eredmény skálázásában.
Jó lenne hozzá látni a motor áramát. Segítené az értelmezést, ha megadnád az időalapot is. Valami feltehetőleg korlátozza az áramot, mert ha tényleg teljesen ki van nyitva a híd, akkor nem ezt a gyorsulást várnám.
Ha összességében így viselkedik a szabályozó, akkor ez nem is olyan rossz. Ez a kb. 10%-os túllendülés akár vállalható is. A PWM értékeket nézve, persze meglehetősen "csapkodó" ez a szabályzó. Az erősítés csökkentésével, vagy az integrálási idő növelésével nem lehetne szelídíteni rajta?
Ha jól láttam ez egy nyomtatónak a meghajtására ráépült konstrukció. A lomjaim közül előtúrtam egy régi HP deskjet nyomtató motorját. Ami nekem van, annak a típusa D2162-60006. Persze adatlapot nem találtam róla, csak egy összehasonlító táblázatot, amiben benne szerepel.
Megpróbáltam megmérni a jellemzőit, hogy lehessen szimulálni, mert akkor talán egyszerűbben ki lehetne próbálni a különböző topológiákat. A nálam lévő motor R ellenállása 11,5/13,5 ohm, a kefék állásától függően. Az induktivitását kb 16mH-nek mértem. A sors RL kör villamos időállandója így egy majdnem 1,5msec. Ez alapján ha néhányszor 10kHz-es frekvenciának megfelelően szimulálunk, nem követünk el nagy hibát, ha nem használjuk a differenciál egyenleteket. A belső feszültséget helyettesítő kondenzátor értékét kb. 1700µF-nak mértem. Ez az üresen járó motorra igaz. Neked van rajta terhelés, aminek van tömege, ezért ez tovább növeli ezt a kapacitást, mondjuk elsőre 2000µF-ra biztos fel lehet kerekíteni. Az üresjárási árama 75mA körüli. Úgy összességében nem túl jó benyomást kelt, nagyon nagynak találom az R tagot. Ha neked is nagyjából ilyesmi motorod van, akkor kiegészíthetjük az Excel tábládat a motor helyettesítő képével.
Igen, egy ilyen mechanikát találtam és gondoltam jó lesz tesztelni, de nem akartam kimondottan erre kihegyezni a programot. Persze nem lenne probléma ha néhány egyszerű méréssel meghatározhatóak lennének bármely motor paraméterei.
Ebben más a motor száma, ha simán rámérek, induktivitása 3,6mH (LCM3), ellenállása 11 Ohm, üresben 88mA, lefogva 1,2A az árama. Kb. 16kHz a freki, a számításokat a PWM timere időzíti utóosztóval (a 16-os 1024us, de ezt állítgattam már felére, negyedére is, de 1-16-ig állítható). Vettem fel ilyen diagramot is csak a P érték állításával, próbálkozva a Ziegleres paraméterek meghatározásával. Felírtam az excelbe a Takahashi féle meghatározást is, csak ott elbizonytalanodtam, hogy a sebesség függvényt kell-e elemeznem. Majd írok egy rutint ami az áramot is naplózza, csak most elpakoltam, mert kellett a hely az asztalomon .Ja igen, a ábrán 1ms az időosztás. A hozzászólás módosítva: Feb 3, 2016
Arról, hogy szerintem hogyan kell felvenni a motor helyettesítő képét korábban írtam:
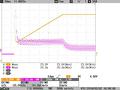
"Fogd meg a motor tengelyét, küldjél át rajta néhány amper DC áramot, és mérd meg a kapocsfeszt; ebből meg lesz a soros ellenállás. Ha van szkópod, akkor lefogott tengellyel kapcsolj rá egy fix dc feszültrséget, miközben egy söntön mérd meg az árammeredekséget; ebből meglesz a soros induktivitás. Ha van labortápod, akkor állítsd áramkorlátra, és szabad tengellyel kösd rá a motorra. A motor kapocsfeszültségének emelkedéséből meg lesz a belső feszültséget szimuláló kapacitás." Más képen is biztosan meg lehet mérni, de szerintem a multiméterek a kefék bizonytalan impedanciái miatt becsaphatnak. Egy-egy képet az induktivitás és a kapacítás meghatározásához feltettem. Induktivitás mérés; MOTO0002, sárga a kapocsfesz, lila az áram (100mV/A lakatfogó 2 menettel). Ebből (az indulási meredekségből) L=U*di/dt=20*0,2msec/0,25A=16mH Belső feszt helyettesítő kondenzátor mérés; MOTO0004; sárga kapocsfesz, lila az áram (a labortáp áramkorlátjáról, annak értékét elfogadva). Ebből C=Igy*dt/du=(I-Iüres)*dt/du=(0,2A-0,075A)*0,2sec/15V=1667uF
Nagyon köszönöm a segítségedet, de pont azt szeretném valahogy elkerülni, ha lehet, hogy ilyen műszerezettséget igénylő méréseket kelljen elvégezni. A mostani naplózást simán a Pickit programozóval olvasom ki a PIC-ből.
Közben megírtam a áramérést is, ez a számítások kezdetén indítja az AD-t 4us akvizíciós idővel (tehát a PWM felfutó élétől 4us-ra mér rá, 12 bites felbontás, 2A méréshatár, de nem kalibráltam pontosra, gondolom úgyis inkább csak a görbe formája a fontos). Fel is vettem a PWM 0-max. diagramokat. Gondolom a sebesség görbét kellene kiértékelni, de elég "darabos", esetleg ha pl. 5 minta átlagolásával venném fel lehet segítene. Ebből lehetne esetleg valamilyen módszerrel meghatározni a közelítő paramétereket. A finomítás már mehetne a válaszgörbék alapján.
Így is jó, ha a PIC-kel mérsz. A helyettesítő kép értékei akkor lesznek pontosak, ha a mérés is pontos, ezért legalább nagyjából jó lenne kalibrálni. Persze lehet relatív értékekkel is számolni, de én jobban kedvelem, ha minden mértékegység SI-ben van.
Feltételezem, hogy a négy görbe egy időben lett felvéve. Az áram görbének az elejét az időtengely irányába jó lenne kinagyítani, mert az első meredekség alapján lehetne az L tagot meghatározni, a maximálisan kialakult áram alapján az R tagot. A C-t egy kicsit nehezebb, mert az áram is változik, de ha kiválasztasz egy olyan szakaszt, amiben nagyjából lineáris a változása, annak a középértéke könnyen meghatározható, és akkor a sebesség változást figyelembe véve, már meghatározható a C-tag.
Ez a görbe 1ms osztással lett felvéve, de szerintem simán le lehet menni 64us-ig, mivel itt nem kell PID-et számolgatni, csak a memória mérete szab határt. Nem tudom az lehet-e probléma, hogy itt nem egyenfeszültséget kap, hanem PWMmax-ra ugrik (ami a programban beállítható érték, most kb. 99%-os kitöltés). Az árammérés söntje 5% 200mOhm, amit egy 5x erősítő (20k 1%, 4,99k 1%) emel 2A esetén 2V-ra, 12 bites felbontású AD 2,048V referencia, tehát az ábrán a 2000 értékhez 1A tartozna. A sebesség mértékegysége vonal/ms.
Az nem probléma, hogy csak 99%-os a pwm jel.
Visszaolvastam, de nem találtam most, hogy mekkora tápfeszültségről járatod a motort. Kellene az értéke, hogy számolni lehessen. Ha esetleg finomabb felbontással fel tudnád venni az áram görbe elejét, akkor pontosabb lehetne a számítás.
Csináltam néhány tesztet, egyszerűbb berakni az xls-t. A 64us x5 fülön ugye 64us az osztás, az áram értéke 5 mérés összege, így a 10000-es érték 1A-nek felel meg. A táp 12V, a PWM az 5-ös időpillanatban ugrik.
Gondoltam amíg nem tudom folytatni a motor tesztelését, rajzolgatom ezt az A300-at. Lenne is pár kérdésem:
- ilyen optót nem találtam, viszont van nekem, és kapni is lehet HCPL2630, gondolom az jó lesz bele, - a TH1 jelű alkatrész pontosan micsoda, és mit figyel, - a segédtáp IC-je sem egyszerűen beszerezhető, mit lehetne helyette ( esetleg valami DC/DC konverter?), - az analóg részbe mehetnek kerámiakondenzátorok, vagy legyen fólia (csak az nem nagyon van SMD-ben), - a H hídban az áram söntje mekkora teljesítményű legyen. Nem tudom kb. hogy kellene kinéznie az egésznek, milyen bordát szoktak használni hűtésnek, de gondolkodom, hogy a teljesítmény panelt esetleg külön nyákra tenni.
Még egy kérdés: ugye minden IC-nek 5V a tápja?
Üdv!
Egy 3v-os egyenáramú motor forgásirányát szeretném változtatni. Úgy, hogy, ha egy 3 állású kapcsolót felfelé kapcsolok akkor pl. jobbra forrog, ha le akkor pedig balra. Szoval értitek, ezt hogy tudnám megoldani. Valami ötletetek van? Előre is köszi!
Ezt +/- táppal tudod megoldani, vagy 2áramkörös billenőkapcsolóval.. akkor elég a sima táp is.
A hozzászólás módosítva: Máj 2, 2016
Sziasztok!
Elkellene egy kis segítség. DC motor irányváltó elektronikáját kellene cserélni mechanikus elemekkel. Van 2 végállás kapcsoló, a kettő között kellene "szánkozni" oda-vissza folyamatosan Előre is köszönöm a segítséget!
Hello! Elég nehezen érthető, mit is szeretnél. Elektronikát lecserélni mechanikus elemekre? És a "mechanikus elemek" alatt mit értesz?
Mekkora teljesítményű a motor, mekkora a névleges feszültsége?
Esetleg kép a jelenlegi állapotról?
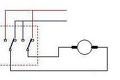
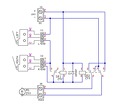
Ha esetleg a cél, hogy elektronika nélkül szeretnéd a két végállás közötti irányváltást megoldani, akkor egy lehetséges megoldás. De konkrét választ nem igazán lehet adni a Péter által is hiányolt adatok nélkül. Itt két relé van, az SR1 kisáramú, míg az SR2-nek el kel viselnie a motor feszültségét és áramát is. De ha van olyan reléd, amin három egymástól független váltóérintkező van, akkor egy relé is elegendő lehet. De a motornak el kell viselni a közvetlen azonnali irányváltást. Ha nagy teljesítményű, és/vagy nagyobb tömeget mozgat, akkor megviselheti mechanikusan a dolog, de a mozgatott mechanikát is. Nem beszélve a tápellátó eszközt a motor induláskori áramfelvételéről. Tehát lehet, hogy nem ok nélkül van irányváltó elektronika abban amit cserélnél.
Elnézést, hogy nem fejtettem ki részletesebben. Igen, relékre gondoltam. A motor 12V-os de kb. 3 V körül kell megtáplálni hogy a nekem megfelelő fordulatszámot produkálja. A fogyasztás eléggé minimális akár iindulásnál is, 12V-on kb 200 mA
Akkor vagy 3V-s reléket használsz, vagy a relék feszültsége külön lesz és magasabb, mint a motorfeszültség.
|
Bejelentkezés
Hirdetés |