Fórum témák
- • Villanypásztor
- • LED szalag
- • Elektromos távirányítós kapunyitó
- • Analóg oszcilloszkóp javítása
- • CNC építése házi alkatrészekből az alapoktól
- • Kondenzátor
- • Érdekességek
- • Kaputelefon
- • Arduino
- • Videomagnó problémák
- • Sprint-Layout NYÁK-tervező
- • IMI villanymotor
- • Digitális adatátvitel
- • Mosogatógép hiba
- • Transzformátor készítés, méretezés
- • Nagyfeszültségű tápegység
- • 3-fázisú Modbus-os teljesítményszabályzó (SCR power controller)
- • Rádióamatőrök topikja
- • Elfogadnám, ha ingyen elvihető
- • Erősítő mindig és mindig
- • Villanyszerelés
- • TDA7294 végerősítő
- • Számítógép hiba, de mi a probléma?
- • Klíma szervizelés, javítás
- • Klíma beszerelése, fűtés-hűtés házilag
- • Kombikazán működési hiba
- • Általános antennás kérdések, válaszok
- • Dobozolási technikák, műszerdobozok
- • Elektronikai témájú könyvek újságok
- • Elektromos vezérlésű pneumatika
- • Hangszórójavítás (otthon)
- • Internetes rádióvevő
- • Alternativ HE találkozó(k)
- • 3D nyomtatás
- • Felajánlás, azaz ingyen elvihető
- • Akkumulátor töltő
- • Háromfázisú aggregátor
- • Szintetizátor javítás
- • Boombox javítás
- • Sütő javítás
- • Mosógép vezérlők és általános problémáik
- • Laptop javítás, tuning
- • Autós erősítős kérdések, problémák
- • Mikrohullámú sütő javítás, magnetron csere, stb.
- • Villanymotor
- • Vegyes barkácsfogások
- • Digitális óra
- • Hűtőgép probléma
- • TV hiba, mi a megoldás?
- • Szünetmentes táp javítása, élesztése
- • Erősítő építése elejétől a végéig
- • Műhelyünk felszerelése, szerszámai
- • Függvénygenerátor építése
- • SMD, mi a típusa?
- • Hibrid erősítő
» Több friss téma
|
- A PIC ÖSSZES Vdd és Vss (AVdd és AVss) (tápfeszültség) lábát be kell kötni!
- A táplábak mellé a lehető legközelebb 100nF-os KERÁMIA kondenzátorokat kell elhelyezni.
- Az MCLR lábat, 10kohm-mal fel kell húzni a Vdd tápfeszültségre.
- Külső kvarc használatakor 4MHz-ig XT, a fölött pedig HS konfigurációt kell beállítani.
- Stabilizált tápegységet kell használni, a kapcsoló üzemű "telefon töltő" adapterek okozhatnak hibákat.
- Programozáshoz, használj lehetőleg PICKIT2 vagy 3 programozót. Kerülendő a JDM (soros porti) programozó.
- A PIC adatlapja (PDF), tartalmazza a lábak kiosztását és a PIC minden paraméterét. Az adatlap ingyen letölthető!
- Egyes PIC típusoknál az RA4 nyitott nyelőelektródás (Csak lefelé húz L szintre, H szintet nem ad ki!)
- Ha a PGM lábat digitális ki-/bemenetnek használod, az alacsony feszültségű programozási lehetőséget le kell tiltani.
Köszönöm, könyvjelzőztem is 
Sziasztok!
Segítséget szeretnék kérni! PIC18f46k80 pic-kel szeretnék egy rendszert működtetni. A pic belső RC oszcillátorról működne 16Mhz-en. A program mikroc-ben íródik.
//Timer0 //Prescaler 1:64; TMR0 Preload = 3036; Actual Interrupt Time : 1 //Place/Copy this part in declaration section void InitTimer0(){ T0CON = 0x85; TMR0H = 0x0B; TMR0L = 0xDC; GIE_bit = 1; TMR0IE_bit = 1; } void Interrupt(){ if (TMR0IF_bit){ TMR0IF_bit = 0; TMR0H = 0x0B; TMR0L = 0xDC; //ezt kell csinálnia PORTD.RD0= ~PORTD.RD0; } } void main() { TRISA=63; //kezdetben a 0. láb és az 1. láb input, majd induláskor a begyujtás miatt output vagyis TRISA=60 TRISB=224; // az 5,6,7 lábak áramfigylő bemenetek lesznek, a többi láb motorvezérlő kimenet TRISC=0; // minden láb kimenet TRISD=0; //minden láb kimenet TRISE=9; //az 1. és a 4. láb bemenet a többi kimenet. a 4. láb vagy analóg bemenet vagy digitális Portd.RD0=0; Portc.RC6=0; Portc.RC1=1; InitTimer0(); }
Megszakításban, az RD0 bitnek szekundumonként felváltva kéne 0 és 1 között billegnie.
Ezzel szemben az RD0 kb 3 s-ig 0-ban van, majd átvált 1-be és úgy marad. Az RC6 viszont nem vált nullára és az RC1 sem vált 1-re. Olyan mintha nem is menne az oszcillátor, de akkor miért van 1 váltás az RD0-án. A hozzászólás módosítva: Dec 5, 2018
A program ciklikusan újra és újra végrehajtja az inicializálásokat. Tegyél a main() -be az InitTimer0() utánra egy végtelen ciklust.
Szia!
Ezt csináltam, ha erre gondoltál:
//Timer0 //Prescaler 1:64; TMR0 Preload = 3036; Actual Interrupt Time : 1 //Place/Copy this part in declaration section void InitTimer0(){ T0CON = 0x85; TMR0H = 0x0B; TMR0L = 0xDC; GIE_bit = 1; TMR0IE_bit = 1; } void Interrupt(){ if (TMR0IF_bit){ TMR0IF_bit = 0; TMR0H = 0x0B; TMR0L = 0xDC; //ezt kell csinálnia PORTD.RD0= ~PORTD.RD0; } } void main() { TRISA=63; //kezdetben a 0. láb és az 1. láb input, majd induláskor a begyujtás miatt output vagyis TRISA=60 TRISB=224; // az 5,6,7 lábak áramfigylő bemenetek lesznek, a többi láb motorvezérlő kimenet TRISC=0; // minden láb kimenet TRISD=0; //minden láb kimenet TRISE=9; //az 1. és a 4. láb bemenet a többi kimenet. a 4. láb vagy analóg bemenet vagy digitális PORTD.RD0=0; PORTC.RC6=0; PORTC.RC1=1; InitTimer0(); while(1); }
Maradt minden a régiben.
Miért PORT? Ennek van LAT regisztere, használd azt. A PORT nem megbízható kimenetvezérlésshez ha terhelt. Analóg funkciót nem néztem meg, de az nincs egyiken sem véletlenül? Alapból az dominál ha nem kapcsolod ki. A hozzászólás módosítva: Dec 5, 2018
Szia!
Átírtam
//Pic18f46k80 belső RC oszcillátor 16Mhz //Timer0 //Prescaler 1:64; TMR0 Preload = 3036; Actual Interrupt Time : 1 //Place/Copy this part in declaration section void InitTimer0(){ T0CON = 0x85; TMR0H = 0x0B; TMR0L = 0xDC; GIE_bit = 1; TMR0IE_bit = 1; } void Interrupt(){ if (TMR0IF_bit){ TMR0IF_bit = 0; TMR0H = 0x0B; TMR0L = 0xDC; //ezt kell csinálnia LATD.RD0= ~LATD.RD0; } } void main() { TRISA=63; //kezdetben a 0. láb és az 1. láb input, majd induláskor a begyujtás miatt output vagyis TRISA=60 TRISB=224; // az 5,6,7 lábak áramfigylő bemenetek lesznek, a többi láb motorvezérlő kimenet TRISC=0; // minden láb kimenet TRISD=0; //minden láb kimenet TRISE=9; //az 1. és a 4. láb bemenet a többi kimenet. a 4. láb vagy analóg bemenet vagy digitális LATD.RD0=0; LATC.RC6=0; LATC.RC1=1; InitTimer0(); while(1); }
most billeg de az RC6 és az RC1 nem veszi föl a kijelölt állapotot. Az RD0-án az állapotváltozás
1.9 sec körüli.
Az RC1 az igazából RD1, vagyis rossz helyre küldtem a parancsot.
viszont a fél periodus idő az változatlan 1,9 s.
Tehát rezgés van.
Neked HF-INTOSC beállítás kell az Oszcillátor beállításánál. OSCCON regisztert nem állítottad be sehol! Ezen belül az IRCF<2:0> = 111 esetén lesz 16MHz-ed.
Interrupt Flag-et közvetlenül az interrupt-ból való kilépés előtt törlünk!
void Interrupt() { if (TMR0IF_bit) { //ezt kell csinálnia PORTD.RD0 = ~PORTD.RD0; TMR0H = 0x0B; TMR0L = 0xDC; TMR0IF_bit = 0; } }
Mikroc-ben nem a kódban van az osc beállítás ha jól tudom, bár lehet azt is kezeli. Az IDE-ben kell beállítani. A hozzászólás módosítva: Dec 6, 2018
Kétlem. Eddig olyannal még nem találkoztam, hogy az OSCCON-t is az IDE kezelne, hisz az csak egy regiszter. Abból az ablakból ítélve, amit mutatott, az IDE csak a Config bit-eket állítja be.
Én MikroPascalozok ugyan de az IDE beállítja au oszcillátór típusát ( pl.belső oszcillátorra) De a konkrét frekvenciát én mindig kódból OSCON -al állítom be.
Részlet egy UH távmérőből:
program UH_Tav_mero; uses MyUnit_meres , MyUnit_LCD ; { LCD Deklaráció } var LCD_RS : sbit at RC2_bit; var LCD_EN : sbit at RC3_bit; var LCD_D4 : sbit at RC4_bit; var LCD_D5 : sbit at RC5_bit; var LCD_D6 : sbit at RC6_bit; var LCD_D7 : sbit at RC7_bit; var LCD_RS_Direction : sbit at TRISC2_bit; var LCD_EN_Direction : sbit at TRISC3_bit; var LCD_D4_Direction : sbit at TRISC4_bit; var LCD_D5_Direction : sbit at TRISC5_bit; var LCD_D6_Direction : sbit at TRISC6_bit; var LCD_D7_Direction : sbit at TRISC7_bit; var tavolsag : dword; txt : array[4] of char; var MertEgyseg , MerCyc : word; begin { Main program } OSCCON.IRCF0 := 1 ; // belsõ oszcillátor 8 MHz ANSEL := 0; // analóg bemenet tiltása ANSELH := 0 ; // analóg bemenet tiltása
Így van! Máshogy nem is lehet szerintem.
Logikus, csak emlékezetből írtam. Egyszer volt a gépemen és mintha úgy rémlene, hogy a frekvenciát is be lehetett állítani, én is csak ember vagyok. Majd a megmondja aki használja.
Sziasztok!
Ismét problémába ütköztem! Változatlanul a PIC18F46k80 a problémás darab. A megszakításból szépen villog a led, viszont nem kel életre az LCD. 4 soros LCD-n szeretnék megjelentetni adatokat, de ő nem akarja.
//Pic18f46k80 belső RC oszcillátor 16Mhz // LCD module connections sbit LCD_RS at RD2_bit; sbit LCD_EN at RD3_bit; sbit LCD_D4 at RD4_bit; sbit LCD_D5 at RD5_bit; sbit LCD_D6 at RD6_bit; sbit LCD_D7 at RD7_bit; sbit LCD_RS_Direction at TRISD2_bit; sbit LCD_EN_Direction at TRISD3_bit; sbit LCD_D4_Direction at TRISD4_bit; sbit LCD_D5_Direction at TRISD5_bit; sbit LCD_D6_Direction at TRISD6_bit; sbit LCD_D7_Direction at TRISD7_bit; // End LCD module connections /*hőmérsékleti változók*/ short int kazanvize,kazanvizv,fust,efust,fustalap,szobaalap,viz,eviz,vizalap; //8 bites egész szám int tuz,etuz,tuzalap; //16 bites egész szám float szoba,eszoba,kulsoho,kornyezetiho; //32 bites lebegőpontos szám /*hőmérsékleti változók vége*/ //működtető válozók short int meresi_ido; float beadagolasi_ido,beagolas_szunet; int i; //ciklusokban használt egész változó //LCD kiíratás sorai //12345678901234567890 char txt1[] = "Fü:230C >230C Ve:70%"; char txt2[] = "Tű:450C >450C Kulso"; char txt3[] = "B:23.5C >23.5C ho"; char txt4[] = "Viz:68C?>68C -1 5.5C"; //Timer0 //Prescaler 1:64; TMR0 Preload = 3036; Actual Interrupt Time : 1 //Place/Copy this part in declaration section void InitTimer0(){ T0CON = 0x85; //megszakítási idő 1 sec TMR0H = 0x0B; TMR0L = 0xDC; GIE_bit = 1; TMR0IE_bit = 1; } void Interrupt(){ if (TMR0IF_bit){ TMR0IF_bit = 0; TMR0H = 0x0B; TMR0L = 0xDC; //ezt kell csinálnia LATD.RD0= ~LATD.RD0; meresi_ido++; } } void uzem() { Lcd_Out(1,1,txt1); Lcd_Out(2,1,txt2); Lcd_Out(3,1,txt3); Lcd_Out(4,1,txt4); } void main() { TRISA=63; //kezdetben a 0. láb és az 1. láb input, majd induláskor a begyujtás miatt output vagyis TRISA=60 TRISB=224; // az 5,6,7 lábak áramfigylő bemenetek lesznek, a többi láb motorvezérlő kimenet TRISC=0; // minden láb kimenet TRISD=0; //minden láb kimenet TRISE=9; //az 1. és a 4. láb bemenet a többi kimenet. a 4. láb vagy analóg bemenet vagy digitális LATA=0; LATB=0; LATC=0; LATD.RD0=0; LATD.RD1=0; InitTimer0(); Lcd_Init(); Lcd_Cmd(_LCD_CLEAR); Lcd_Cmd(_LCD_CURSOR_OFF); // uzem(); Lcd_Out(1,1,"hol vagy"); Lcd_Out(2,1,txt2); Lcd_Out(3,1,txt3); Lcd_Out(4,1,txt4); delay_ms(1000); while(1) { } }
Legyetek szívesek segíteni, hol rontottam el? A második és negyedik sorból csak 3 3 sor jelenik meg
karakterenként. Kiírás viszont semmi.
Köszönöm a segítséget! A hozzászólás módosítva: Dec 6, 2018
Hali!
Meg kell nézni a könyvtári?? függvényben az lcdinit milyen parancsokat ad ki,
és az lcdout fuggvény tudja-e a 4 sort kezelni...
Kiindulás HD44780 adatlap...
Sziasztok!
Annyi változás történt, hogy egy lapon találtam hasonló problémára megoldást, amit a mellékelt kód tartalmaz. Vagyis az LCD pic-kel való kapcsolatát a LAT-on keresztül oldja meg, valamint a main részben az oscon regisztert átírja. Van kijelzőre írás, viszont a kijelzőn harmadik sorában van egy karakter ami nincs txt3 kiírandó sorban.
/* kazánvezérlő */ //Pic18f46k80 belső RC oszcillátor 16Mhz // LCD module connections sbit LCD_RS at LATD2_bit; sbit LCD_EN at LATD3_bit; sbit LCD_D4 at LATD4_bit; sbit LCD_D5 at LATD5_bit; sbit LCD_D6 at LATD6_bit; sbit LCD_D7 at LATD7_bit; sbit LCD_RS_Direction at TRISD2_bit; sbit LCD_EN_Direction at TRISD3_bit; sbit LCD_D4_Direction at TRISD4_bit; sbit LCD_D5_Direction at TRISD5_bit; sbit LCD_D6_Direction at TRISD6_bit; sbit LCD_D7_Direction at TRISD7_bit; //működtető válozók short int meresi_ido; float beadagolasi_ido,beagolas_szunet; int i; //ciklusokban használt egész változó //LCD kiíratás sorai //12345678901234567890 char txt1[] = "Fu:230C >230C Ve:70%"; char txt2[] = "Tu:450C >450C Kulso"; char txt3[] = "B:23.5C >23.5C ho"; char txt4[] = "Viz:68C >68C -15.5C"; //Timer0 //Prescaler 1:64; TMR0 Preload = 3036; Actual Interrupt Time : 1 //Place/Copy this part in declaration section void InitTimer0(){ T0CON = 0x84; //megszakítási idő 1 sec TMR0H = 0x0B; TMR0L = 0xDC; GIE_bit = 1; TMR0IE_bit = 1; } void Interrupt(){ if (TMR0IF_bit){ TMR0IF_bit = 0; TMR0H = 0x0B; TMR0L = 0xDC; //ezt kell csinálnia LATD.RD0= ~LATD.RD0; meresi_ido++; } } void uzem() { Lcd_Out(1,1,txt1); Lcd_Out(2,1,txt2); Lcd_Out(3,1,txt3); Lcd_Out(4,1,txt4); } void main() { // OSCCON bits IDLEN_bit = 0; IRCF2_bit = 1; // setup for 8MHz IRCF1_bit = 1; // IRCF0_bit = 0; // set all to 1 for 16MHz + PLL = 64MHz korábban=0 OSTS_bit = 0; // running internal OSC HFIOFS_bit = 0; // read only, 1 = osc stable SCS0_bit = 0; // System Clock SCS1_bit = 0; // Primary Clock ed even with internal OSC // this is to enable the use of PLL //============================= //OSCTUNE = 0b01000000; // PLL enabled // PLLEN_bit = 1; //OSCCON2 = 0b10000000; //PLLRDY_bit; while(!HFIOFS); // wait for HFINTOSC to be stable //eddig másoltam TRISA=63; //kezdetben a 0. láb és az 1. láb input, majd induláskor a begyujtás miatt output vagyis TRISA=60 TRISB=224; // az 5,6,7 lábak áramfigylő bemenetek lesznek, a többi láb motorvezérlő kimenet TRISC=0; // minden láb kimenet TRISD=0; //minden láb kimenet TRISE=9; //az 1. és a 4. láb bemenet a többi kimenet. a 4. láb vagy analóg bemenet vagy digitális // PMD2 = 0xFF; PMD0 = 0xFF; LATA=0; LATB=0; LATC=0; LATD.RD0=0; LATD.RD1=0; InitTimer0(); Lcd_Init(); Lcd_Cmd(_LCD_CLEAR); Lcd_Cmd(_LCD_CURSOR_OFF); delay_ms(1000); while(1) { uzem(); delay_ms(1000); } }
Ellenben a megszakítás megszűnt. Vagyis az RD0- nem változik az állapot.
Sziasztok!
Megoldódott! A main-ből kitöröltem az osccon beállításokat, valamint a PMD regiszterek beállításait. Csak az LCD pic csatlakozás LAT-jai maradtak. Van megszakítás és a kijelzőn csak az van ami txt-ben szerepel.
Sziasztok!
Megint falba ütköztem!
Elindítom programot, ami bejelentkezik az LCD-n az üzem függvényben levő sorokkal. Majd anélkül, hogy megnyomnám a PORTA.RA2-re menő nyomógombot belép az if után levő utasításokra és megjelenik a főmenü az LCD-n és ezt végtelen ciklusban teszi is mert villog 150ms-mal.
/* kazánvezérlő */ //Pic18f46k80 belső RC oszcillátor 16Mhz // LCD module connections sbit LCD_RS at LATD2_bit; sbit LCD_EN at LATD3_bit; sbit LCD_D4 at LATD4_bit; sbit LCD_D5 at LATD5_bit; sbit LCD_D6 at LATD6_bit; sbit LCD_D7 at LATD7_bit; sbit LCD_RS_Direction at TRISD2_bit; sbit LCD_EN_Direction at TRISD3_bit; sbit LCD_D4_Direction at TRISD4_bit; sbit LCD_D5_Direction at TRISD5_bit; sbit LCD_D6_Direction at TRISD6_bit; sbit LCD_D7_Direction at TRISD7_bit; #define ok PORTA.RA2 // nyomógomb program megáll menü előugrik #define elore PORTA.RA0 //nyomógomb balra visszamozgat számol + #define vissza PORTA.RA1 //nyomógomb jobbra előremozgat számol #define PORTA.RA3 //nyomógomb ok #define start PORTA.RA5 // program futása //Timer0 //Prescaler 1:64; TMR0 Preload = 3036; Actual Interrupt Time : 1 //Place/Copy this part in declaration section void InitTimer0(){ T0CON = 0x84; //megszakítási idő 1 sec TMR0H = 0x0B; TMR0L = 0xDC; GIE_bit = 1; TMR0IE_bit = 1; } void Interrupt(){ if (TMR0IF_bit){ TMR0IF_bit = 0; TMR0H = 0x0B; TMR0L = 0xDC; //ezt kell csinálnia LATD.RD0= ~LATD.RD0; meresi_ido++; } } void uzem() { Lcd_Out(1,1,"Fu:230C >230C Ve:70%"); Lcd_Out(2,1,"Tu:450C >450C Kulso"); Lcd_Out(3,1,"B:23.5C >23.5C ho"); Lcd_Out(4,1,"Viz:68C >68C -15.5C"); } void main() { /* // OSCCON bits IDLEN_bit = 0; IRCF2_bit = 1; // setup for 8MHz IRCF1_bit = 1; // IRCF0_bit = 0; // set all to 1 for 16MHz + PLL = 64MHz korábban=0 OSTS_bit = 0; // running internal OSC HFIOFS_bit = 0; // read only, 1 = osc stable SCS0_bit = 0; // System Clock SCS1_bit = 0; // Primary Clock ed even with internal OSC // this is to enable the use of PLL //============================= //OSCTUNE = 0b01000000; // PLL enabled // PLLEN_bit = 1; //OSCCON2 = 0b10000000; //PLLRDY_bit; while(!HFIOFS); // wait for HFINTOSC to be stable //eddig másoltam */ TRISA=1; //kezdetben a 0. láb és az 1. láb input, majd induláskor a begyujtás miatt output vagyis TRISA=60 TRISB=224; // az 5,6,7 lábak áramfigylő bemenetek lesznek, a többi láb motorvezérlő kimenet TRISC=0; // minden láb kimenet TRISD=0; //minden láb kimenet TRISE=9; //az 1. és a 4. láb bemenet a többi kimenet. a 4. láb vagy analóg bemenet vagy digitális LATA=0; LATB=0; LATC=0; LATD.RD0=0; LATD.RD1=0; InitTimer0(); Lcd_Init(); Lcd_Cmd(_LCD_CLEAR); Lcd_Cmd(_LCD_CURSOR_OFF); uzem(); delay_ms(1000); while(1) { if (ok==0) { delay_ms(150); Lcd_Cmd(_LCD_CLEAR); fomenu(); } } }
Nem olvastam végig, hogy mi merre van kötve, de az RA2-őn szokott leni analog port is és egy sor ANSEL=0 (vagy ANSEL/ANSELH/ANSELA) ami digitálisra állítaná a portot így a PORT olvasással mindig 0-t fogsz vissza kapni.
Tanács kerüld el a kis betűs define-okat jobban jársz ha pl ilyen szemantikát követsz (mert így két nap múlva is tudni fogod mi az ok), #define BTN_OK PORTA.RA2 (persze ez nem kötelező)
Szia!
Köszi! Valóban az volt a hiba oka, hogy nullázni kellett az ANCON0 és az ANCON1 regisztereket.
Szuperül megy.
Sziasztok!
Így 1 hónap után lett annyi időm, hogy ránézzek erre, és eSDi, a te kódoddal (átírva a PPS-eket, hogy az RC3-4-et használja) működésre tudtam bírni. Ebből adódóan megállapítottam a hibám; az MSSP modul PPS-e ki lett választva a RC3-4-nek, de a lábak PPS-e nem lett és ez okozta a gondot.
Köszönöm !
| (#) |
Auf hozzászólása |
Dec 8, 2018 |
 |
/ |
 |
|
Sziasztok!
16 bites chipnél C nyelven, hogyan csinálnátok két float különbségéből signed char-t? A két float értéke nem sokban tér el egymástól, így a kivonás eredménye egy előjeles kis értékű szám. A kis értéket, az eltérést kellene egy 8 bites előjeles számon ábrázolnom.  Valahogyan így gondoltam:
float a = 3,86, b = 3,88, c = 3,85; signed char d = 0; a - b = - 0,02 --> d = -2; a - c = + 0,01 --> d = 1

Minden segítséget örömmel fogadok. Hasonló megoldások is érdekelnek. 
Ebbe én is belefutottam, nem volt egyértelmű a dolog. Tízszer biztos átolvastam ezt a részt az adatlapban. Aztán 18F4550-en szintén nem működött pár hete, pedig ott nincsenek ilyen kacifántok. Mire rájöttem, hogy bemenetnek kell állítani azt a két lábat. Pedig ez is le volt írva.
d = (signed char)(100.0 * (a - b));
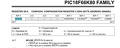
Sziasztok!
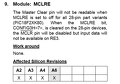
A PIC18F46k80 adatlapján az szerepel, hogyha az RE3 lábat digitális bemenetként szeretném használni
akkor a CONFIG3H regiszter 7. bitjét törölni kell. Ezt az edit projectben tudom megtenni, meg is történik a váltás, viszont az MCLR tiltás után az RG5 van engedélyezve. Viszont az RE3
nem reagál az 1-ről 0-ra történő változásra. Tenni kell még valamit?
Mindjuk felhúzni 10k-val a tápra, ha még nincs.
Az Errata-ban van említás az olvashatatlan MCLR lábról, 28 lábú kontroller esetén. Nincs kizárva, hogy érvényes a 40 lábú változatokra is...
Szia!
Már korábban leírtam az ezzel kapcsolatos ismereteimet, lényegében ugyanezt. Még feljebb azt is hogy mikroc-ben írom a programot. Csatolok 2 képet.
usane-k írom, hogy van 10K ellenállás.
Rendben. Akkor következő kérdés. Csatolhatnád az idevonatkozó kódot (ami figyeli ezt a lábat) valamint mi alapján látod, hogy nem reagál a változásra? Debuggerben látod, vagy LED-el jelzed ki, stb?
|
|