Fórum témák
» Több friss téma |
Fórum » Robotkar
>ITT< találtok egy videót a működéséről. Nem a youtube miatt ilyen kása, csak ennyit tud a fényképezőm video módja. Beraktam a végállás kapcsolókat, így nem szorul meg örökké a menet.
A függőleges tengely körüli forgása kicsit izgága, kell a motor elé egy nagyobb áttétel. F1-F8 billentyűkkel lehet irányítani, jó játék...
borvendeg kérésére:
2007-es Országos Elektronikai Konstrukciós versenyre indultunk egy robotkarral. A mechanikát nem mi készítettük, hanem a suliban lévő, használaton kívül kart használtuk fel. (elavult régi vezérlése volt) Szervó motoros, bordás szíj hajtás, masszív erős felépítés, bár néhol lötyögött a szerkezet. A neve Scorbot : Így néz ki Az elektronikát a tanárommal dobtuk össze. én a motorvezérlő paneleket terveztem, Ő az alaplapot. (sajnos nagyrészt az ő munkája volt az elektronika, mivel az iskolában nem oktattak kellő szinten). A PC-s programot egy srác dobta nekünk össze Borland Delphi-ben. A velem együtt induló srác meg a vezérlőkart rakta, tákolta össze. Ez egy aluvázas kar, amin áttételek és opto-tárcsák vannak az ízületeknél. A Vezérlőkarról érkező jelek az alaplapra mennek, ott smidt-triggereken, meg kapukon át LPT porton be a PC-be, A szoftver meg LPT porton keresztül vezérli a kart. (A programban még osztva volt a bejövő step. mivel a robotkaron túl kicsi volt az opto-tárcsa felbontása.) Csatolok egy dokumentációt. Meg szelektálok képeket, videókat és feltöltöm őket.
Köszi. Indulásnak nem rossz de asztjhiszem ezzel is sok meló lesz a robotomat szeretném felszerelni vele de ez még a jövő zenéje.
Mekkora a robotod?
Ha kisebb, akkor én a szervós megoldást választanám. (az első hozzászólásban látható a lynxmotion féle rendszer.) Amúgy az általunk készített vezérlés egy kudarc, zsákutca. Maximum a step/dires szervóvezérlőt tartanám meg belőle. Függetlenné tenném a géptől, és soros porton kommunikálnék vele. Ha lenne pénzem 10-15 erősebb RC szervóra akkor építenék egy jó kis robotot. De Így csak marad a szemétből babrált plotter. Az említett robotodról némi infót megosztasz esetleg?
Sziasztok! Nem rég készült el az én házilag készített ipari robotkarom. Nézzétek meg:
Bővebben: Link
Nagyon profi, gratulálok! Mi lesz a feladata?
Köszönöm!
A robotot diplomamunkaként készítettem el, az egyetem pedig megvásárolta tőlem oktatási célokra. Éppen hogy elkészültem vele határidőre, így csak egy, a videón is látható demo program fut rajta. Aztán jövőre valamelyik hallgató biztosan átprogramozza valamilyen egyszerű pakoló munkára, de konkrét munkája szerintem sosem lesz szegénynek. Én legalábbis már nem tudok vele foglalkozni így, hogy nem az enyém.
Hát, ez nagyon "ott van", pestiesen szólva! Minden elismerésem, komoly munka van mögötte, ez egyértelmű. Reméljük, relatíve értelmes célokra fogják hasznosítani, bár, ha belegondolok, az oktatás a legnemesb cél!

Hali!
Valóban rengeteg munkaórám van benne. Ami azt illeti, a mechanikai tervezés és kivitelezés volt a munka oroszlán része. Ami az oktatást illeti, én is remélem, hogy jó célt fog szolgálni, habár félek, hogy hamar tönkre megy mert csak egy prototípus. Olcsó alkatrészekből építettem, például a mechanika 80%-a fából van. Mert azt könnyen megtudtam munkálni házilag.
Azzal együtt is elismerésre méltó, mint kezdeményezés, mint kivitelezett mérnöki munka, egyaránt. A látványából pedig senki nem mondja meg, hogy fából van javarészt, vagy hogy "csak" (és ezt NAGYON idézőjelbe tettem!) prototípus. Csak így tovább, ilyen, haladó gondolkodású, értelmes, de a fizikai munkától sem megrettenő értelmiségiekre van nagyon nagy szüksége az országnak!
Én fejet hajtok előtted! 
Üdv mindenkinek!
Én is kedvet kaptam egy ilyen robotkar megépítésére csak az a baj hogy nekem sima dc motorjaim vannak és szeretném hogy ha egy mozdulatsort még ha nyomógombok segítségével is de be tudjam programozni. (Maximum PIC vagy PC)
Szia!
Ha házilag akarod összehozni DC motorral, akkor encoder tárcsákra lesz szükséged, amit a motor tengejére rögzítesz. Olcsón kitermelhető ez nem használt számítógépes (golyós) egerekből. Esetleg a tárcsát kell lecserélni más felbontásúra. Igaz nem professzionális, de a célnak megfelel. Nekem ez volt anno az egyik tesztalanyom, kreálmányom: (bár nem emlékszem opto tranzisztoros, vagy diódás volt)
Köszönöm, majd szétberhelek egy leharcolt egeret és megpróbálkozok vele.
 De mivel tudom majd vezérelni tehét ha van további ötleted azt várom. De mivel tudom majd vezérelni tehét ha van további ötleted azt várom.
üdv mindenkinek!
azt honnan lehet tudni az optotárcsánál, hogy merre forog?  a válaszokat előre is köszi.
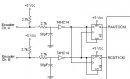
Csatolom az encoder bekötését.
Így kapsz két négyszögjelet, amiből szoftveresen megtudod az irányt és a lépésszámot. A motornak is kell egy vezérlő, pl H-hidas, vagy valami ic-s dolog. Írni kell egy step-dir vezélőt a picbe. Így ha a motor a súly, vagy külső hatás miatt el akarna mozdulni, nem tud, mert az encoder érzékeli a mozdulást, és visszafordítja. (Van egy változó a microvezérlőben, aminek nullának kell lennie. kívülről növelheted az értékét, vagy csökkentheted. ha növeled, akkor egyik irányba fordul, ha csökkented akkor meg a másik irányba. Ez a lépésszám. (step) ) Szóval a pic-re teszel 2 nyomógombot, az egyik növeli azt a változót, a másik pedig csökkenti. Ha jól emlékszem, akkor valahogy így működik a szervó vezérlés. (persze, ez még csak ON-OFF motorvezérlés, ezt meg lehet bolondítani szép dolgokkal, pid, stb...) annyit beszélek erről, hogy lassan kedvet kapok én is...
Az attól függ, hogy milyen felépítésű!
Ha 2 opto tranzisztor van benne, akkor azok többnyire egymás mellett helyezkednek el, így amikor a tárcsa forog, az egyik elé előbb ér a rés. Ebből már ki lehet kalkulálni, az irányt.
Köszönöm, csak az a baj hogy programozáshoz semilyen nyelven(C, basic stb) nem értek, de van pic égetőm mert már régebben csináltam egy pic 16f628-as uC vel egy bináris órát az osztálytársamnak és jól működött, de ahhoz megvolt adva a HEX fájl.
Winkleres fogaskerekek
 Vannak ott okos dolgok, jó áron, én is rendeltem 1 marékkal, legyen mivel tesztelgetni... Vannak ott okos dolgok, jó áron, én is rendeltem 1 marékkal, legyen mivel tesztelgetni...Amúgy én a legegyszerűbb robotkar vezérlést servo teszterekkel gondoltam, minden motorhoz 1-1 teszter, nem tudom ez mennyire életképes...
működni, működni fog, de minden egyes szervót magadnak kell irányítani.
akkor már talán jobb volna mikrovezérlővel megoldani, (ott is lehet a uC-hez poti bemenetet kötni, de lehet akkor programozni is)
Ja igen, azt nem mondtam h direkt ez a lényege h magam tudjam irányítani a szervókat. Gondoltam a micro vezérlőre én is, de mivel nemigen tok pic et programozni, 1előre marad ez.
Tudna valaki egy olyan anyagot mondani,_amelyik nem élő, és elektromos áram hatására összehúzodik,_tartósan,_meg ki._(Nem a hagyományosra gondolok,_relé,_stb.)_Pl:_ami nem igaz:_birkabél,_vagy TV kábel,_virágszár, stb.
Kösz a gondolatot._Zorro Legközelebb az ilyen trehányul összelapátolt hozzászólást szó nélkül törlöm, Te meg kapsz egy szép, hosszú figyelmeztetést! Frankye
Régebben lehetett kapni izomhuzalt mit pwm jellel lehetett vezérelni elég pontosan
Régebben én is sokat agyaltam a robotkar építésen. Igazából a mechanikai kivitelezése fogott meg leginkább. A szabályzással túlzottan nem foglalkoztam.
Akkoriban bukkantam egy hidraulikusan működtetett karra. Orvosi fecskendők voltak a csuklópontokban, a fecskendőkben lévő folyadék nyomásszabályzásával voltak mozgatva a karok. Sajnos össz-vissz csak egy kép volt a robotkarról. Fogalmam sincs hogyan lehetne megoldani ennek a "vezérlését", de azt biztos, hogy egy abszolút nagy teherbírású, 0 holtjátékú kart lehetne építeni, ami vezérléstől függően nagyon finom mozgásra is képes lehetne. Erről mi a véleményetek? Hogyan lehetne összehozni hozzá egy vezérlést?
Sziasztok!
Kezdem az elejéről. Elkezdtem építeni egy 3 csuklós humanoid robotkart, azaz csak modellt, nagyon könnyűszerkezetes lesz és a teljes hossza is csak olyan 50 cm. Tisztán vezérlés alapúra terveztem, de rengeteget dobna az értékén ha egy minimális szabályozást építenék hozzá. Tehát a feladat, hogy vannak a szervo motorok (Towerpro SG 90, 9 grammosak, és sajnos minimális adat található róluk neten is, ellenben olcsóak és elég sokan használják Őket.), aminek a fordulását kellene visszamérni, és mielőtt az opto vagy a potis megoldással jönnétek, sajnos nagyon kicsi a modell ahhoz, hogy ez kivitelezhető legyen illetve már meg van tervezve, tehát valami más megoldás kellene. Amire gondoltam az a túláram mérése, hogy tudjam mikor akadt meg a robotkar és szimplán elküldöm Fail-safe módba. Tudom ez sem szabályozás, de legalább van visszajelzésem... Jah és a kamerás megoldás sem megoldás, ahhoz a részéhez nem is értek és nem is szeretnék Erre keresnék ötleteket, vagy másféle fordulat visszamérés, vagy túláram mérése mikrokontrollerrel, hogy miként. Feltételezem elég minimális lehet az áramfogyasztása. Egyébként Atmega16-os mikrokontrollereket szántam bele de ha kicsi lenne az A/D miatt akkor természetesen megoldható egy nagyobb számoló egység. Segítséget előre is köszönöm!
Szia
Ha értesz a pic/avr-hez akkor nem értem mi itt a kérdés? Kell méretezni egy kis teljesítményű ellenállást amin érzékeli a feszültségesést + az indítási áramfelvételt figyelmen kívül hagyni. Próbálgatni kell milyen érték/teljesítményű ellenállás a jó. Üdv
Itt az lehet még a gond, hogy a kar üresen kevesebb áramot fog felvenni, ha meg terhelve van, pl megfogsz valamit vele és azt kell odébb rakni, akkor megint nagyobb lesz az áramfelvétel, mert a szervónak több áram kell a pozícióban tartáshoz.
Mi lenne, ha a szervóban lévő poti jelét vezetnéd ki és azt hasonlítanád össze a beállított elfordulás értékével. Ha nem egyezik, akkor gond van és mehet "fail-safe" módba.
Na igen pont az ilyen válaszokért tettem fel a kérdést.
A probléma hogy ez egy igen pici szervó, nem lehet megbontani, konkrétan 2*2*1 cm a mérete... Belül minden nagyon pici SMD, tehát esélyem sincs ilyesmire, itthoni felszereléssel :S A kérdés pedig azért lett feltéve mert ez tudom jól, hogy ettől még ha a túláramot sikerül is kimérnem közel sem lesz szabályzás pedig az lenne a cél :S Ezt pedig ahogy lehet lemérem, hogy a pozícióban tartás valóban nagyobb áramot vesz-e föl :S De ha van valakinek erről is infója azt nem bánnám
Tehát a két végpontot kellene érzékelni, de ha terhelve van az ne legyen befolyással a mérésre, jól értem?
Mindezt bármiféle jeladó nélkül?
A terhelés nem feltétlenül gond amennyiben az nem jár akkora áramfelvétellel, mint ha túlterhelném.
Bár mivel ez egy szakdoga és tudok játszani a terheléssel, majd megoldom, hogy valami nagyon könnyű dolgot emelgessen és akkor talán nem jár akkora áramfelvétellel... Az a baj hogy ezt így hirtelen most azonnal nem tudom letesztelni, este még jelentkezem (nem értem, hogy adhatnak ki olyan alkatrészt főként egy szervomotort amihez nem készítenek datasheet-et...) |
Bejelentkezés
Hirdetés |