Fórum témák
» Több friss téma |
Fórum » Robotika kezdőknek
Helló!
És a tengelyekhez csapágyak kellenek vagy ,nem ,és ha kellenek milyenek?
Nem tudom mennyire szabad itt másokat reklámozni, de érdemes itt is megnézni, hátha van olyan ami kellene...
Baloldalt a menüben: mechanika, aztán fogasszíjak...
Ha szeretnéd hogy a tengelyek a helyükön maradjanak, akkor kell valamilyen csapágy (már az is csapágy, ha egy fadarabon lévő furaton átdugod a tengelyt hogy abban forogjon).
Azt, hogy milyet alkalmazol függ a feladattól és a lehetőségeidtől. Van akinek egy furat elkészítése is nagy probléma, van aki meg magának önt csapágyházat alumíniumból...
Egyszerű hobby célra kéne .

Azt szeretném még kérdezni ,hogy két rádióból kiszerelt motornak a teljesítménye elég-e egy kb 1-2kg-os távirányítós robot kb 6-7 km/h sebesség eléréséhez?
Ez azért nem ilyen ránézni és eldönteni dolog....
Egyrészt kérdéses mekkora áttétel kerül rá, milyen módon vezérled, nomeg mekkora a hajtott kerekek átmérője. Kinematika dinamika itt jönne képbe, de kis méreteknél nem kell foglalkozni vele. Csapágynak elég ha átvezeted a rudakat => csúszócsapágy (felületminőségre azért figyelj) Egyébként is jólenne kiderítened pár dolgot a mocijaidról, mert kell hozzá építened H hidakat ha sebességet is meg forgásirányt is akarod változtatni......
Köszönöm, pont ilyenre gondoltam. Már csak egy árat kell kideríteni és minden infó meglesz.
/előző hozzászólásomhoz fűzném: Két kiló szerintem egy ilyen robotnak rengeteg, nekem is 30 centis robot 18 motorral meg aksival se több 640 grammnál....
Kb 11-12 cm átmérőjű kerekek vannak , és a vezérlés egy 12 voltos aksival lenne ,hogyha balra akaruk fordulni akkor a bal oldali motor hátra a jobb oldali motor előlre forogna. A sebességét nem akarom vátoztani , egy féke s ebesség előlre egyféle hátra .
Akkor ez tényleg egy távirányításos autó
 Forgásirányhoz kell a H híd legfeljebb neked a pwm kimarad akkor... Azért megjegyzem, ha egy sebességet akarsz: Idézet: „ Azt szeretném még kérdezni ,hogy két rádióból kiszerelt motornak a teljesítménye elég-e egy kb 1-2kg-os távirányítós robot kb 6-7 km/h sebesség eléréséhez?” ilyen sebességhez tartozó áttétellel elég kemény nyomaték kell a motortól, és a pontos fordulást el is felejtheted... Eljutottál oda, ahol a rajzolgatás már nem elég, számolni kell! Nyomatékokat, szögelfordulást időhöz mérten, gyorsulást.... Persze túlméretezéssel sok mindent meglehet úszni, de az egy határon túl már gányolás.
Helló,ugye már régebben megemlítették hogy azokhoz az adókhoz valami decoder kell.Nos tehát ezeket hogy tudnám megoldani?

A Manchester kódolásra gondolsz? Van külön erről szóló tomic is itt a fórumon és a keresővel is rengeteg találatot kapsz.
Az adóhoz egy vevő kell. Az pedig, hogy milyen kódolással mennek át jelek a választásodon múlik. Manchester kódolásnál PIC/AVR és csak rajtad múlik mit hozol ki belőle. Gyanítom te párhozamos - soros és soros - párhuzamos ic párokra gondoltál mint ami távirányítókban is elő szokott fordulni. Innen már elég keresőszót kitudsz szedni googlihoz.
Köszi szépen bodgabo és Zozi85.

Sziasztok!
Foglalkoztatok már az L298-as IC-vel? Most szeretnék egy áramkört tervezni vele. Ha jól láttam, ebben két külön H híd van. A Sense A és B lábnál hány Ohm-os sönt ellenállás kell? A Vss-hez elég az 5V? A logikai bemenetekhez maximum 5V-ot tudok adni. A Vs-hez pedig 7.5V-ot szeretnék kötni.
Elsőre az adatlapból fél ohm-os értéket vettem ki, külön táp bemenetek meg nem véletlen vannak.
Hali
Az ellenallasok erteke fugg a motoraramtol. Maga a L298 nem tartalmazza a choppert, ehez szukseg van meg egy L297 IC-re is L297 . A L297 Vref bemeneten 1 V van, tehat 0.5 Ohm Rs eseten 2 A lesz a chopper kapcsolasi erteke. A Vs minimalis erteke a katalogus szerint a Vih+2.5 V, tehat 7.5 V. A Vss 5 V. Udv Vili
Sziasztok!
Lassan (nagyon lassan) kész lesz a robotom (WILL-I) végleges verziója (cikk is készül). Ha elkészült, akkor valami új ATMega8-on alapuló project témát kellene találnom. Nem valami komoly dologra gondoltam, mert a célom a tanulás. Ezért egy rövid közvéleménykutatást tartanék, hogy milyen témáról irjak majd kezdőknek szóló cikket? Üdv.: Gábor
Az AVR miértek, hogyanok c. témában szinte minden oldalon van valaki, aki "segítsetek, kizártam magamat" szavakkal jön. Szerintem jó lenne egy erről, illetve a Fuse bitekről szóló cikk.
Bár számomra mindig is érthetetlen volt, hogy hogyan sikerült, több, mint egy éve foglalkozok AVR-el, majdnem napi szinten, de nekem még sose sikerült.
Én is gondoltam a Fuse bit-ekre, de most még csak a gyári beállitásokkal, a belső 1MHz-es oszcillátorral használom az ATMega8-asaimat. Majd akkor foglalkozom vele, ha valamilyen időzités kritikus, vagy nagy pontosságú projectbe kezdek (pl. soros kommunkiáció, óra stb...)
A soros kommunikáció jól jöhet robotfejlesztéshez, de az óraépités pl nem érdekel.
Szerintem mélyedj el jobban a robotban, modulokra bontva sok "extrát" hozzá lehet adni, és mások számára is szabadabban átültethető.
Sok olyan terület van ami re mindenki egyből tudja a választ, de a hogyan rész már nem teljesen világos, pld gyorsulásmérők kiértékelése...
Üdv mindenkinek!
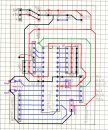
Fizikus cikke alapján tervezem utánépíteni WILL-I-t (vagy legalábbis valami hasonlót). De mivel nincs itthon próbanyák/breadboard, rendes nyákom viszont van (és a költségvetés szűkös) ezért végleges panelen építem meg. A panelt megterveztem, de mivel nem teljesen vagyok biztos a dolgomban, azt szeretném kérni, hogy valaki ellenőrizze le a tervemet. Ez Alapján a kapcsolás alapján dolgoztam. Egy átkötés van a rajzon, pirossal jelölve.
Szia!
Szerintem nincs sok ember, akinek van ideje átnézni ilyeneket. Egyébként nagyon egyszerű, Te is át tudod nézni. Javaslom, hogy próbáld ki az Eagle NyÁK tervezőt. A demo szoftver letölthető a honlapjáról ingyenesen.
Üdv!
Én már vagy ötször ellenőrzitem, de mivel először terveztem nyákot, gondoltam kérem a nálam hozzáértőbbek segítségét. Hátha elsiklottam valami fölött, vagy szimplán csak rosszul tudok valamit. Pórbálkoztam EAGLE-el, de nem nagyon igazodtam ki rajta. Az igazat megvallva lusta voltam utánaolvasni, hogy mit és hogyan az EAGLE-ben ezért döntöttem a papír ceruza mellett.
mester06-nak igaza van, megér egy kis szenvedést az Eagle. Hidd el nagy találmány, nem véletlen használja egy fél világ. Hofi Géza mondta egy tréfában: Haver ha megismered a tehenet, elfelejted a kecskét. Ha rááldozol egy kis időt az Eagle-re többet nem rajzolsz kézzel semmit, s főleg nem szorulsz arra hogy más ellenőrizze a munkád. Hidd el megéri. Bocs a viccér.
(A juhász meg azt mondta a kecskének: ó kecske, milyen jó lenne, ha még főzni is tudnál....az Eagle szinte azt is tud.)
Szia!
Én 3 apróbb változtatást eszközölnék a rajzodon. 1- Ha a 2.-ik verziót is később meg akarod épiteni, akkor érdemes az 5V-ot és a GND-t is odavezetni a PB3 lábhoz, mert igy kialakithatsz egy csatlakozót a szervónak is. 2- Én az AREF lábat összekötöttem az AVCC lábbal, de utánagondolva, ha egy univerzális nyákot készitesz, akkor érdemesebb inkább egy 2 tüskéből álló érintkezőre kivezetni, mert ha egy jumpert raksz rá akkor az ADC referencia feszültsége 5V lesz, ha meg más (5V-nál kisebb) feszültséget akarsz referenciának, akkor egyszerűen leveszed a jumpert és rákötöd az AREF-re. 3- A PB6 és PB7 lábakra érdemes egy csatlakozót kötni, amit 2 db 22pF-os kondival a GND-re kötni, mert később szükség lehet külső oszcillátorra, de a kész nyákot akkor már nem tudod módositani. Azért érdemes egy csatlakozót rakni és nem fixen beforrasztani egy kristályt, mert ekkor tudod cserélgetni őket, különböző sebességűeket tudsz használni, ha pedig nem raksz bele kristályt akkor meg a belső oszcillátort is tudod használni (lásd a következő hozzászólásomhoz mellékelt képet!). Akkor is jól jöhet ez a csatlakozó, ha véletlenül kizárnád magad az AVR-ből a fise biteket elállitva, mert ilyenkor csak beteszel egy megfelelő sebességű kristályt a csatlakozóba és utána vissza tudod állitani a fuse biteket.
Valami ilyesmi csatlakozóra gondoltam:
Üdv!
Arra énis gondolta, hogy megcsinálom a helyet a kristálynak, bár az nem jutott eszembe, hogy csatlakozót is tegyek rá. Tanácsaidat megfogadom, és köszi, hogy átnézted a tervet. Közben már elkezdtem olvasgatni EAGLE doksikat, hogy legközelebb már ne legyen ilyen téren segítségre szükségem. Bye.
Azért te is nézzed át mégegyszer a kapcsolást!
Azt is érdemes figyelembe venni, hogy az egyes elemek mekkora helyet foglalnak el a valóságban, mert ez a rajzon nem látszik.
Elvileg a lábtávolságokkal nincs gond, mert méretarányosan nagyítottam a duplájára a rajzot és lemértem a lábközöket ( kivéve az ellenállásoknál és a kondiknál). De ahogy mondod még énis átnézem, sőt valószínűleg újra is rajzolom mostmár a valós arányokkal (vagy kézzel vagy gépen).
Érdekes dolgok történnek az L29X ic-immel. Eleinte L293-at használtam, de nagyon melegedett, néha szép látványosan ketté is repedt. Gondoltam túl van terhelve, váltok.
Újraterveztem a dolgokat; L298-at használtam óriási hűtőbordával. Ez elbír csatornánként 2A-t. A motorom 400-500mA-t vesz fel ha terhelés van rajta; ha épp irányt vált, akkor esetleg egy pillanatra 1A-ig megugorhat ha rossz napja van. Erre leég ez is. Rendesen be vannak rakva a védődiódák (1000V 1A...), de ez csakazértis leég. Van valakinek ötlete, hogy mitől van? Nem szereti az enable lábon a pwm jelet? Nem értem mitől halnak meg ezek sorozatosan. Az irány lábak inverteren át vannak vezérelve, hogy 1 bit változtatása meghatározza a forgásirányt; enable meg pwm-t kap. Olykor teszteltem dolgokat úgy, hogy az őt irányító pic lábakat nem konfiguráltam. Az ezzel járó lebegés lehetett baj? Van valakinek ötlete, hogy mi történik itt? Elvileg túláram nem juthat rá (2A gyorskiégésű biztosító is van előtte), 12V feszültség pedig mélyen a tűrése alatt van. |
Bejelentkezés
Hirdetés |