Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
Szia! A három kivezetés arra utal hogy az egy 3 fázisú léptetőmotor. Ilyennek méred ugye? Miből gondolod hogy tönkrement?
Szia !
Igen ilyennek mérem. Abból gondolom, hogy az 1 ohm az nem túl kevés tekercsellenállásnak? Ha viszont ez így gyári akkor milyen feszültségről és milyen formában kell kipróbálni? Hogyan kell bekötni?
Csak az ellenállásérték miatt nem gondolnám hogy rossz, főleg ha mindhárom fázison ugyanazt méred. Próbáld ki egy laposelemmel, sorban az egyes fázisokhoz érintve beáll-e pozícióba, illetve fordul-e. A háromfázisú vezérlő nem lehetetlen dolog csak nagyon ritka, pl. az SLA7611M IC step-dir bemenetű és háromfázisú léptetőmotor vezérlő, de nem tudom idehaza hol lehet kapni. Mégis mekkora az a motor? Megéri vezérlőt építeni hozzá? Ha semmi adat nincs mennyi lehet a súlya?
Kb. 60-70dkg lehet a súlya.
Mindössze 1db van belőle és már elkezdtem az orosz oldalon lévő vezérlőt csinálni. Úgyhogy ezt a motort most vakvágányra teszem.
Hellósztok!
Lenne egy-egy darab 28byj-48 tipusu léptetőmotorom 5voltos 5 vezetékes,ehhez kell 4n25 féleségű optocsatoló és külső áramforrás vagy a kimenetre lehetne? Elég pici a motor Például egy link: Bővebben: Link (szerk: a linken 12v-os van,az enyémre 5v van írva) Köszönöm a válaszotokat. az ic az 16f877a-s ic lenne
Szia!
Optoelválasztás nem feltétlenül szükséges, de a pic kimenete nem tudja biztosítani a tekercsek áramát (max. 25 mA / kimetet). A 12V-os tekercsének ellenállása 300 ohm, árama 40 mA. Mivel a motornak 5 kivezetése van, a meghajtáshoz elég 4 db npn tranzisztor.
A súlya után azt mondanám hogy nem gyengécske nyomtatómotor, ha sikerül elindítanod használható lenne. Sok sikert hozzá!
Sziasztok !
Tud valaki valamit a KLÁVIÓ KFT. -ről, mert a telefonszámukon előfizető nem kapcsolható. Léptetőmotort szerettem volna rendelni de előtte gondoltam felhívom Őket és meglepetésemre ez történt. Léteznek azért ? Próbáljak a webáruházukból rendelni és lesz ami lesz ? Vagy tudtok más címet hasonló elfogatható árakkal ? Köszi.
Biztos hogy léteznek, a hobbycnc fórumon saját topikjuk van, ott rákérdezhetsz.
Alapkapcsolás, csak kísérletezésre ajánlom. Mit szeretnél meghajtani a léptetőmotorral?
Sziasztok!
Épitettem egy komparátoros áramszabályzású léptetőmotor vezérlőt fetes végfokokkal az allegro ugyanezt használja néhány icjében(sla7026,sla7029). Első fokozat a komparátor, utánna egy monostabil időzitő, majd egy pictől jövő bemenet, ami a tekercsek szekvenciáját kapcsolja, és végül a fetmeghajtás. A gondom az, hogy néha elindul a motor, néha nem, néha gyönyörűen forog, néha megáll egy pontban, és rázkódik. Minden léptetőfrekvencián ezt csinálja. Mitől lehet? Többfajta komparátort próbáltam(lm339,lm324), többfajta fetet(irliz24,irl540), és ugyanez a hiba. A digittáp , és a motortáp független egymástól. A digitvezetékek árnyékoltak. A pic csak annyit tesz, hogy mindig két tekercset kapcsol be, a másikkettő meg ki van kapcsolva. Ugyanez a helyzet, ha csak komparátort+fetet használok. A motor jó, más vezérléssel jól működik. Mi lehet a gond?
Van egy 1W-os 808nm-es lézerem, azt. A mechanika majdnem kész, most próbálgatom a végállásokat.
Közben jó lett a vezérlőm, csak az az érdekes, hogyha újraindítom a programot, kegyetlen lassan kezd el mozogni a motor, aztán gondol egyet és újra begyorsul.
sziasztok! egy ilyet szeretnék építeni: Bővebben: Link
Keresnék valakit, aki segít az elektronikai részében. Csak a léptetőmotor vezérlője kéne, az "asztalt" megoldom. A videón látottakon kívül egy olyan PC-s vezérlés is kellene, hogy be tudjam állítani az elfordulás mértékét, és egy egy gomb az oda-vissza irányra. Ha tudsz segíteni dobj egy ímélt a fiókomba. Nem lennék hálátlan ... 
Akkor nincs nagy terhelés, oda még jó is lehet. Azt azért jó volna tudni hogy a program adja helytelenül a step jeleket, vagy a motor nem okés (az utóbbi valószínűbbnek tűnik) Attól is foroghat lassan hogy kiesik a szinkronból a motor, próbáld meg visszavenni a gyorsítást.
Lehet inkább a win7-tel és PCI-os lpt kártyával van gond.

Sziasztok!
A mellékelt képen látható ECA2725 típusu léptetőmotor vezérlését szeretném megoldani PIC-el. A motort szétszedve úgy látom hogy a tekercsek nem csillagba hanem deltába vannak kötve. A motor tulajdonságai: – 3-phase, 6-pulse external rotor motor. – EC technology. – Dynamically balanced rotor with 4-pole hard ferrite magnet. – Determination of rotor position via 3 Hall sensors. – Precision ball bearings for long service life and silent running. – Motor supply and control via external operating electronics. Adatlapja: Bővebben: Link - 3. oldal Az internetet böngészve meghajtó IC-nek az SLA7611M vagy az SI7600 lenne a legalkamasabb, de sajnos ezekhez nem találatam magyarországi forgalmazót. :no: SLA7611M: Bővebben: Link SI7600/SI7600D: Bővebben: Link A kérdésem az lenne hogy tud-e valaki a fenti két IC-nek valamilyen beszerzési forrását, vagy valami egyéb megoldást a szóban forgó motor vezérlésére. Előre is köszönöm a válaszokat!
Ha ez sima léptető motor akkor keress itthon is elérhető vezérlőt, pl TB6560
No igen, ezzel csak az a baj hogy az általad javasolt vezérlő kétfázisú motorhoz való, az enyém pedig háromfázisú.
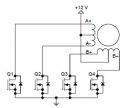
Sziasztok. Léptetőmotorokat vezérelnék én is, mégpedig unipolárisan. A célom, hogy minél egyszerűbb kapcsolásom legyen, PIC használattal (16f877).
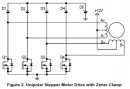
A PIC és motor illesztését FET-ekkel szeretném megoldani. Kinéztem egy FET-et: IRLZ24N, ebben van védődióda is. A kérdést azért írom ide, mert átnéztem ugyan a topikot, de PIC/FET/UNIP. kombóra nem találtam még kapcsolást, megvalósítást. Neten keresgélve viszont 2 megoldást találtam (a és b verzió, számomra az A a szimpatikusabb). A kérdéseim ezekre vonatkozna: -Eléggé kezdő vagyok elektronikában még, így valaki elmondaná, hogy a B kapcsolás mivel másabb, mint az A, illetve miért kellenek oda a plusz diódák. - Ha az A megoldást választom, a FET-eket (gate lábakat) egyesével bekötöm a PIC lábakra. A kettő közé kell ellenállás, ha igen, hogyan méretezzem? (Amit kinéztem FET-et az megfelel e erre a célra?) - A motorom 6 vezetékes, 1A / 2 Ohm / 2 V... Ha épp nem léptetek (álló helyzet), akkor is ráadhatom a 2 Voltot, vagy akkor már melegedne? (Ergo a táp, ami az A verzióban a tekercsek közös lábainál 12 Volt, nekem az 2 lesz.) A válaszotokat előre is köszönöm! 
Üdv!
Válaszok: - a diódák lényege, hogy a motor induktivitását gyorsabban összeomlasztjuk, mert a lekapcsoláskor az indukálódott feszültséget nem a tápfeszültségig, hanem egy zenerrel tovább engedjük növekedni. Ezáltal a motor mágneses lassítását csökkentjük, azaz nagyobb sebességet érhetünk el vele. - Célszerű ellenállás, pontos értéket nem tudok mondani, de 10-50ohmos nagyságrend. A fet gate-kapacitását figyelembe véve a fet nyitásakor egy pillanatnyi rövidzár lép fel. Ez káros lehet a PIC-re nézve. Ezt hivatott korlátozni az ellenállás. Viszont ez gyakran elhanyagolható, avagy nem veszik figyelembe. - Ráadhatod, melegedni fog, próbálkozz, teszteld! (Elvileg a feten is eshet egy kevés feszültség.) Pár tanács: Ráadhatsz a motorra 5V-ot is, de ekkor 2-3ohmot köss sorba vele. 5W-os legyen! Pl 3.3ohm. Ekkor álló helyzetben a motorra ugyanúgy 2V jut, de dinamikusan a motoron nagyobb feszültség esik, így nagyobb sebességet lehet elérni. Ezt nevezik motortuningnak. Esetleg a PIC-en belül létrehozhatsz egy 50%-os kitöltésű PWM-et. Ez a tartóáram A motort hajthatod áramgenerátorral is. Ez a legjobb megoldás, ami még viszonylag egyszerűbb. Remélem nem zavartalak össze 
Lehet hogy rossz hírrel fogok szolgálni, bár ezt az adatlap alapján te is láthatod. Szóval ez nem léptetőmotor, hanem egy külső forgórészű állandó mágneses háromfázisú szinkronmotor, melynek a pillanatnyi pozíciója 3db Hall szenzorral van figyelve. Ilyen motorokat állandó és stabil fordulatszámon üzemelő berendezésekben használnak.
Dehogy zavartál össze, sőt! A kérdéseimre választ kaptam, egyedül az általam választott FET-ről nem írtál semmit, így bízom benne, hogy az jó lesz nekem, azért nem...
A motor sebessége engem igazából nem érdekel, nem ez az elsődleges szempont, így az A kapcsolás is teljesen megfelel. A tartónyomaték viszont annál fontosabb, ha ezt a PWM-es megoldást választom (meg úgy általánosan kisebb tartóáram), akkor a motor nem melegedik, de mivel kevesebb áramot kap a tekercs, gondolom én a tartónyomatéka is kisebb lesz. Így hát, ahogy írtad is összedobom próbanyákon, aztán figyelem mennyire melegszik. PWM így elsőre magas nekem, de úgy tudnám elképzelni, hogy van ugye egy magas kimenetem a PIC-en (ez megy a gate lábhoz), amivel 1 tekercset gerjesztek. Ha szeretném elkerülni a melegedést, ezt nem folyamatosan hagyom magas szinten, hanem folyamatosan és persze gyorsan ki/be kapcsolgatom. Remélem nem írtam nagy hülyeséget.  Mindenesetre ezzel még ráérek próbálkozni, előbb forogjon a motor! Mindenesetre ezzel még ráérek próbálkozni, előbb forogjon a motor! Nagyon szépen köszi a segítséget!
Köszi bodgabo, ez ez egy kicsit megbonyolítja a vezérlést!
Közben tovább keresgéltem a neten és ráakadtam az MPM3003 adatlapjájra. A 10.oldalon található kapcsoláshoz hasonlót kell megvalósítanom: Bővebben: Link
Nézem egy ideje ezt a fórumot, és én is úgy gondolom hogy ez a talán legegyszerűbb (ha az ember foglalkozik persze MCU-val) kapcsolás sehol sincs fenn. PIC/FET/UNIP
A FET amit kinéztél szerintem több mint jó, igaz én sem értek a tranyókhoz igazából. Viszont néztem egy MOSFET-et, ami 98Ft, és 2 FET van benne. Paraméterileg pedig 4.9A tud 30V ami szerintem megfelelne Neked (is). Ahogy néztem védődióda is van benne. és SMD is ha a méret a lényeg :p. http://www.hestore.hu/prod_10027915.html A pwm működésre nem is sokkal fentebb még egy kapcsolásféle is felkerült. Az elgondolás is helytálló amit leírtál ezzel kapcsolatban. http://www.hobbielektronika.hu/forum/topic_hsz_888084.html#888084 Kíváncsian várom az eredményeidet
De igen, fent van! Pont egy oldallal visszább mutattam egy rajzot unipoláris motorhoz (#854925).
A napokban készült el ugyanennek a bipoláris változata is, majd felteszem ha lesz rá igény.
Igazad van, tényleg van fenn. Csak senki nem firtatta a témát tovább, nekem meg most is félholt a project, szeretném is meg nincs is rá időm
A kérdésem az lenne, hogy miért szükséges 30-50A terhelhetőségű FET-eket beletenni. 5A-es nem lenne megfelelő? Esetleg amit én linkeltem? Megköszönnénk ha megosztanád velünk a bipolárisos kapcsolást is. Lenne olyan motorom is, sokat segítenél vele. Ezeket a kapcsolásokat tesztelted is? Előre is köszi 
Hellósztok!
Lenne egy léptető motor, A datasheetje: Bővebben: Link Ennek a vezérlését szeretném pic-el,feten keresztül meghajtani. ORG 4, PIK 2 - egy tekercs YEL3 BLU 1 - egy tekercs és ezen kivül van még 1 piros ami a közös lenne Valahol azt olvasom,hogy a pirosra kell a pozitív(jelen esetben 5 volt),valahol meg azt,hogy a GND kell. de PIC lábai 5v-ot adnak pozitívba, ezt invertálnom kéne? vagy a pirosra kössem a feketét,és a többire mehet a plusz 5 v? köszönöm szépen
Most picit belekontárkodok a dologba, de ahogy én gondolom:
Ez egy 5 vezetékes unipoláris motor. Ki kéne mérni (biztos ami biztos), hogy melyik vezeték a tekercs melyik pontjait jelenti. (4 tekercs darabonként 300Ohm kéne hogy mérj.) Bekötésileg, a közös pontra lehet kötni a tápfeszültséget, majd MCU segítségével FET-en keresztül GND-re húzni a megfelelő tápot. Erre sargarigo készített is egy kapcsolást, amit fentebb láthatsz, de atis28 is hasonlót küldött pár hsz-el fentebb.
Miért 30-50A-es FET? Hát, hogy őszinte legyek, fogalmam sincs. Talán: Ha lúd legyen kövér, vagy valami ilyesmi.
Egyébként, egy konkrét feladatra kell a motor, illetve a motorvezérlés de lehet, hogy a motor gyenge lesz. Sajna ezt még egyenlőre sem tesztelgetni, sem kiszámolni nem tudom, majd csak később dől el... Így legalább abban biztos lehetek, hogy a FET-ek az új (valamivel) erősebb motorhoz is jók lesznek. Most egy egyszerű kapcsolással (közös pontok tápon, egy kivezetés pedig földön) megnéztem, hogy viselkedik a motor, ha egy pontban kell maradnia. Emelkedik ugyan valamennyit a hőmérséklete, de 40-45 perc után is még bőven az egészséges határon belül volt (szerintem). Többet pedig úgy sem fog állni egyszerre... Így egyenlőre a PWM-et megpróbálom elkerülni. Ha lesz valami eredményem majd jelezni fogok. |
Bejelentkezés
Hirdetés |