
Fórum témák
» Több friss téma |
Cikkek » Nulláról a robotokig - PIC Mikrovezérlők II rész Nulláról a robotokig - PIC Mikrovezérlők II rész
Szerző: Topi, idő: Júl 3, 2007, Olvasva: 64452, Oldal olvasási idő: kb. 1 perc
Először is, hogy legyen mivel kísérleteznünk készítsünk egy 4x3-as mátrix billentyűzetet. Kapcsolási rajza a következő: 
Ezt érdemes univnyákon megépíteni, és úgy csatlakoztatni a próba panelunkhoz. Univerzális nyákon megépítve így néz ki. Törekedjünk az olyan elhelyezésre, hogy a nyákon ne kelljen drózozni:  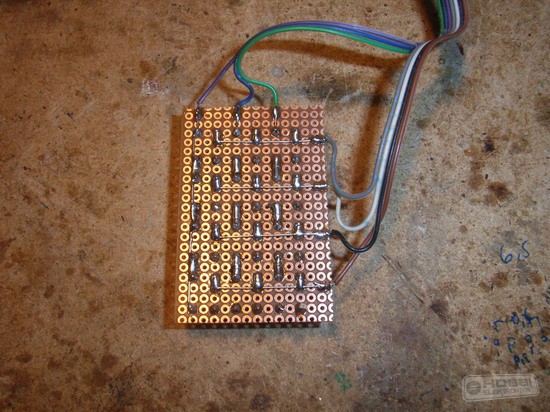
Ha ezzel megvagyunk akkor csatlakoztassuk a PIC-hez az alábbi módon a billentyűzetet: 
Amik el vannak homályosítva, azok maradtak a régiek, tehát csak ezeket pluszban kell hozzá kötni. ROW1-hez ROW2-t és COL1-hez COL2-t. Billentyűzet olvasás program folyamat:
A COL vagyis az oszlop az egy bemenet. A ROW pedig kimenet. Lényegében megnézzük, hogyha bekapcsoltuk valamelyik sort, melyik oszlopon fogunk találkozni ugyan azzal az értékkel. Fontos, hogy a bemenetre földre húzó ellenállásokat tegyünk, mert ha egyetlen gomb sincs lenyomva, akkor instabil a bemenet, vagyis néha 1 néha 0-ás szint. Itt is csak C nyelven írtam meg a lekérdező programot, mert abból nagyon jól és világosan látszik mi a helyzet. Program letölthető itt: 4x3sw.zip A LED-ekre binárisan rakom ki az értéket. A gombok úgy vannak elhelyezve mint a telefonon. Videó a működésről:  (Kattints a képre a videó letöltéséhez) Most következzen a Dual LED-ek használata. A cikk még nem ért véget, lapozz! Értékeléshez bejelentkezés szükséges! |
Bejelentkezés
Hirdetés |
