Fórum témák
» Több friss téma |
Akkor nem tudom. A másik félhidat kipróbálom 1n4007-tel, hátha kibírja. Ha nem, akkor nem. Hétvégén sajnos a fű se nő felénk... Köszi!
Srácok, az lenne a kérdésem, hogy ablaktörlő motort kéne nekem vezérelni H-híddal. Ezt elbírja valami H-bridge IC? vagy mindenképp nekem kell a két motort 8 mosfettel vezérelni? Tudnátok valami ic-t ajánlani ami elbírja? Ha nem akkor használhatok mondjuk a hídba irf540-est? az szerintem elég neki megfelelő hűtéssel. (a mikrovezérlőről természetesen optocsatolókkal szépen leválasztanám meg minden egyéb óvintézkedést megtennék, amit ilyen erejű villanymotor már kíván)
Egy mondatban: Mit ajánlanátok ha ilyet kéne vezérelni? 
Szia!
Elég lenne négy MOSFET a motorhoz. Az IRF540 jónak tűnik, de érdemes lenne két n-FET-et kiegészíteni két P-FET-el. Bővebben: Link
Aha akkor kikeresem az irf540-nek a párját és azzal használom, ez így jól hangzik. Csak ugye jobb lett volna egy ic-t pakolgatni mint a két motorhoz 8 fet-et
 De nembaj, a több fet jobban is néz ki De nembaj, a több fet jobban is néz ki  talán kicsit off: Ezek a pwm mellett kb mennyire melegednek? (60 watt egy ilyen motor durván, terhelve) hány W/°C-os bordát szerezzek rájuk kb ha mind a 8 fetet egyre akarom tenni? Sajnos etéren még nincs rutinom, gondolom két pc táp borda kevés lenne. Ha nem tudtok saccolni az se gond, majd szerzek minél nagyobbat. Köszi.: Dávid
Konkrét bordaméretet nem tudok ajánlani. Próbáld először ki egy ideiglenes összeállítással és azzal tesztelheted a melegedést.
okés akkor kipróbálom majd pc táp bordával

Jobban megfigyeltem a kapcsolási rajzot és arra jöttem rá, hogy ehez nekem 4 pwm csatorna kéne és az atmega8on meg csak 3 van. Nem lehetne esetleg relékkel vagy valamivel úgy módosítani a kapcsolási rajzot, hogy esetleg úgy ahofgy az ic-s h-hidaknál, csak két pwm jel kelljen és 4 "kapcsoló"? Nem akarom újra feltalálni a spanyol viaszt, ezért megkérdem, hogy ezt mivel szokták megoldani? Nincs esetleg egy kapcsolásotok erről?
ui.: Arra is gondoltam, hogy egy l293-as vezérlő ic után tennék még a két motorba menő kimenetére 4 fetet és úgy növelném a kivehető teljesítményét. Nemtudom világosan fogalmazok-e. Ez járható út? Előre is köszi, Dave
De miért kell négy? Kettő csatorna kell. Egy az egyik irányhoz, egy a másikhoz.
Úgyértem két motorral számolva.
Hogy tisztább legyen a kép, egy lánctalpas elven meghajtott robot motorjait kéne szabályozni ezért gondolkodok két motorban. Hiba volt ezt eddig nem közölni. Viszont nekem ez a megoldás jelenleg a legszimpatikusabb, hogy az l293-as után még teszek tranyót vagy fetet. Jó ötlet? Vagy elvetendő?
Akkor is csak két PWM jelre van szükséged. Ha a kitöltési tényező 50 %, a motor áll, ha kisebb előre, ha nagyobb hátra megy például. Meg a másik motor ugyanígy.A harmadikat használhatod más célra, pl daru fel - le.
Használj két Atmega-t, vagy ez megint csak teljesen rossz ötlet?
pucuka: De akkor megintcsak módosítani kell az áramkört valamiben, amit mutattatok Hhidat. Vagy legalábbis úgy látom a működésén.
kadarist: Két atmega nem jó, mindenképp egy kéne. Viszont szerintem ha az l293 al nem a motorokat, hanem feteket vezérlek és azokkal a motorokat, akkor megtudom oldani 2 pwm lábbal az egészet. Akárhogy nézem működnie kell. Tudom ilyen hibrid megoldásokat nem szoktak alkalmazni, de ez nekem most kényelmes. Azthiszem ezzel a tervvel összehozok egy panelt majd.
Sziasztok
Segítséget szeretnék kérni. Szükségem lenne egy H-hídra ami logika 0/1 el működne ..na "egyszerű" h-híd ez a része de kellene bele valami olyan megoldás hogy tudjam szabályoznia motor gyorsaságát amit kapcsol pwm el pl.beállítok egy pwm értéket aztán ha kapcsol a h-híd akkor olyan gyorsasággal forog a motor ami bevan állítva illetve lehetne változtatni. Előre is köszönöm
Szia!
Kicsit több adat kellene, hogy segíteni tudjunk. Ha jól értem valamilyen motorszabályzót szeretnél készíteni. Ha megadod a motoradatokat, akkor az alapján lehet kiválasztani a teljesítmény fokozatot, ez lesz a tulajdonképpeni H híd. A hidat vezérelni kell. Ez történhet valamilyen mikrokontrollerrel, vagy egyéb áramkörökkel. Ennek kialakításához pedig jó lenne tudni, hogy pontosan mit is akarsz; szükséges-e áramszabályozás, fordulatszám irány változtatás, stb.
Hát egy "robot " autón dolgozgatok aminek 6 kereke lesz és mivel szeretném hogy hát terepen is működjön úgy döntöttem hogy akkus fúrókat szétszedek és a benne levő motor illetve áttétel megfelelő lehet erre a célra. A motorok többsége 14,4V os illetve van 2 18V. Az akku 3 darab zselés 6V s akku sorba kötve szóval 18V és 4,5Ah. Az irányítást egy pic végzi. Azt szeretném hogy tudjon a motor előre hátra forogni a pic től függően illetve hogy a motor fordulatszámát tudjam változtatni. Tudom lehetne hogy kevesebb feszültséget adok nekik de nyomatékcsökkenés nélkül kellene úgy tudom a PWM es motorvezérlés megfelel erre a célra. Valahogy úgy kellene, hogy lenne 2 bemenete amit a picre kötnék aminek állapotától függne hogy előre e forogjon a motor vagy hátra. Illetve valahogy a pwm részt is be kellene iktatni de ez az a rész amit nem tudok hogy hogy vagy hogy hova vagy milyet..Előre is kösz
Szép feladatnak ígérkezik!
Mind a 6 kerék meg lesz hajtva, vagy csak egy része? A kanyarodást mi fogja végezni, kormányszerkezet, vagy a motorok fordulatszám eltérésének kell biztosítani? Választottál már PIC-et a feladathoz? Jó lenne tudni, hogy mekkora maximális motor áramra kellene tervezni a hidat. Ha motoronként 1-2A-ről van csak szó, akkor valószínűleg valamilyen cél IC meg fog felelni. A Microchip-nek is van ilyenje (MTS2916A), de ez csak 0,75A-es. A motor a nyomatéka az átfolyó áramtól függ alapvetően (feltételezem, hogy állandó mágneses), a nagyobb feszültség a motor fordulatszám tartományát "bővíti". Valószínűleg nem probléma ezen a feszültség szinten ez a nagyobb tápfeszültség. Szerintem a feladatot egy olyan szabályzófelépítéssel kellene megoldanod, amit úgy hívnak, hogy fordulatszám (motor kapocsfeszültség) szabályozás alárendelt áramszabályzással. Ennek kellene utánaolvasnod. Ha nem találsz anyagot, akkor segítek benne. A hidas teljesítmény elektronikai rész vezérléséhez a PIC-ekben található ECCP modul talán a legalkalmasabb. Ez kifejezetten ehhez optimalizált megoldás, de sima PWM áramkörrel is megoldható. A Microchip oldalán elég sok anyag van ezzel kapcsolatban. Ha nem találod meg, segítek megkeresni.
Mind a 6 kerék egy-egy fúrómotor lesz. PC vel lesz vezérelve a robot egy wifi routeren keresztül egy picel ami már működik jelenleg ledek helyetesítik a motort de működik. A h-hídat inkább mosfetes vagy tranzisztorosat szeretnék. A fordulatszámot csak egyszer kellene beállítani esetleg néha finomitani rajta. Ebben nem vagyok teljesen tisztában de úgy nem lehetne hogy a PWM jelel vezérelni egy mosfet et es a motor egyik kapcsára kötni ? vagy esetleg ez? Bővebben: Link
Köszönöm hogy segítesz
Egy motor vezérlését, szabályozását különféle színvonalon lehet megoldani. Lehet egyszerűsíteni, ha megengedik a körülmények. 6 kerék korrekt hajtásához biztos hogy viszonylag bonyolult szabályozás kell, főleg ha kanyarodna is.
A legegyszerűbb DC motor PWM, amikor egy fet drain körébe teszed a motort nulldiódával, és a pwm-et kedved szerint állítod. Ez persze nem tud irányt váltani, fékezni sem, és a még az esetleges túláramokkal sem törődik semmi. Az általad linkkelt híd, nekem korrekt megoldásnak tűnik, csak az áramérzékelési lehetőséget hiányolom. Persze ha nem akarod figyelni akkor teljesen jó. Viszont akkor a vezérlés részéről biztosítani kellene, hogy legalább induláskor és leálláskor üzemszerűen ne alakuljon ki túláram (magyarán fokozatosan emelni és csökkenteni a kitöltési tényezőt), és néhány biztosítót el kéne helyezni a motorokkal sorba, hogy nehogy leégjenek valamilyen probléma esetén. Ebben a kapcsolásban kettő bemeneted van a fetek vezérlésére. Ez még mindig többfajta lehetőséget ad. Ha csak egy PWM jel van motoronként, akkor az egyik bemenetet direktbe a PWM kimenetre kell kötni, a másik bemenetet pedig egy inverteren keresztül kell csatlakoztatni. Ebben az esetben 50%-os kitöltésnél fog állni a motor, 0% az egyik irány max sebesség, 100% a másik irány max sebesség. Ha tudsz még irányjelet is mellét tenni, akkor lehet úgy is vezérelni, hogy az egyik híd bementettel az irányt jelölöd ki, a másik bemeneten pedig a PWM jelet kapja meg. Ebben az esetben 0%-nál áll a motor, 100%-nál az adott irányba max a fordulat. Vigyázni kell irányváltáskor, hogy a PWM kitöltését is negálni kell. Remélem érthető voltam. Javaslom továbbra is, hogy olvass utána az ECCP modul működésének. Az elvek megértésében is segíthet. Örülök, ha segíthettem.
Aludtam rá egyet, és a második vezérlési módról lebeszéllek a szóbanforgó kapcsolás esetén. Az IR2110 a félhíd felső fetjét nem tudja hosszútávon állandóan bekapcsolni, mivel a tápellátását akkor kapja, amikor az alsó bekapcsol.
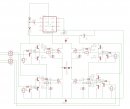
Van egy rajzom, mennyire lehet működőképes?
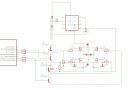
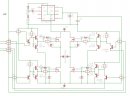
Egy pic-el akarom vezérelni, úgy, hogy az egyik port alacsony szinten van, a másik pwm jelet ad a motornak. A picet másik picra akarom cserélni, és annak a hardveres pwm-jét akarom használni. A pic18f1320 dual pwm port beállításával. Ahogy látom nem fog egybenyitni sehol. Az ellenállások értéke nem túl sok a fetek előtt? Első kép a kapcsolás, a második kép a pic adatlapjából a pwm táblázat, pirossal bekarikáztam a használt portokat.
A hídnak kettő vezérlő bemenete van az optocsatolókon keresztül. Azt jól látod, hogy így ez nem illeszkedik a PIC-ek által támogatott ECCP modulhoz, de ezen a kettő bemeneten keresztül szerintem is tudod a pirossal bekarikázott jelekkel vezérelni.
A kapcsolás véleményem szerint csak viszonylag kis frekvenciákon működő képes. Ezt az viszonylag nagy impedanciák miatt is van, ahogy te is észrevetted, illetve már az optocsatoló is olyan lassú ilyen 10K nagyságrendű munkaellenállással, hogy a pwm vivője 1kHz alatt kell hogy legyen. A kapcsolás V BATT feszültsége 10-15V lehet, mert a felsőhídági fetek különben túl nagy nyitófeszt kapnának. Mekkora feszültségről szeretnéd járatni? Ha kb. ennyiről, akkor szerintem inkább tegyél a felső hídágakba P csatornás feteket, a maxim IC helyett pedig vegyél egy fetmeghajtót (kettő vagy négy csatornásat). Ha fontos az optikai leválasztás, akkor meg kellően gyors darabokat kellene választani (6N137). Ha kéred, lerajzolhatom, hogy mire gondoltam, de akkor ad meg a tápfeszt, a motor áramát. Még egy dolog. Szerintem egy normális DC hajtáshoz hozzátartozik az áramszabályozás, vagy legalább a túláram védelem. Itt nincs áramérzékelés.
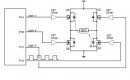
Az, hogy csak N csatornás fet-ek legyenek elég fontos lenne. Az alsó ábra a microchip ajánlása szerint van, ezt kellene megoldanom csak n csatornás fettel minél kevesebb helyen.
A tápfeszültség 7-15V között lenne, leginkább 12V. Az előző hozzászólásomban feltöltött ábra szerinti kimeneti jelekkel operálhatok. Végül is a meghajtással vagyok gondban, az opto-s leválasztás nem kitétel, én is jobb szeretném anélkül. Egy tranzisztoros megoldást rajzoltam ,nem tudom jó-e.
Ahhoz hogy a fetek gyorsan kapcsoljanak, illik mind be- és kikapcsoláskor is "sürgetni" a kapcsolást. A kellő sebességhez (a fetektől függően) több amper is kellhet a be- illetve kikapcsolási idő alatt. A meghajtó IC-k direkt ilyenek. Lehet diszkrét alkatrészekből is építeni, de akkor is meg kell a fenti elvárásoknak felelni.
Az alsóhídági fetek meghajtása nem problémás, vegyél egy duál tokot, kösd rá a 12V-os tápfeszre, és a PIC direktben meghajthatja. A felsőhídági feteknek kell plusz táp, lehet úgy is, ahogy berajzoltad. Ebben a megoldásban akkor lenne egyszerű az áramkör, ha találnál olyan fetmeghajtót, ami 30V-ot is elvisel. Ilyet én csak optó bemenetűben ismerek, pl.: TLP250. Másik lehetőség, amivel próbálkozol, hogy te építesz meghajtót diszkrét elemekből. Kerestem egy kapcsolást, amiből érdemesebb volna kiindulni. Q1 tranyó helyett betehetsz LM339-et, vagy valamilyen gyors komparátort, (műveleti erősítőt). Ennél a megoldásnál fontos a fetek bemenetének a védelme zénerrel, a túlfeszültségekkel szemben. Egy másik lehetőség, hogy olyan "repülő" tápot alakítasz ki, mint amit az IR2110 és társai esetében szokás alkalmazni. Viszont a vezérlési elvedet akkor fel kell adnod, mivel ezek csak akkor jók, ha az alsó fetek is "rendszeresen" bekapcsolnak.
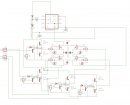
Akkor talán így jó lesz. Tettem be a felső feteknek is zénert, nem tudom jó-e így. Egy tápban láttam már ugyanezt a meghajtást, ott a bd139-db140-ek után az ellenállások előtt volt még két dióda a jel-gnd és a jel tápfeszültség között, ide nem raktam be ezeket, lehet ettől valami baja?
Kicsit kusza a rajz, remélem a lényeg látszik rajta.
A rajz tenyleg nagyon kusza. Probald meg megtanulni az Eagle hasznalatat. Egy eszrevetel: A FET G-re kis erteku ellelnallassal csatlakozunk, kulonben semmi ertelme a tranyos meghajtonak. Lenyeges dolog, mert a FET G-S kapacitas 3-5 nF kozott van es ez a kapacitast kell gyorsan feltolteni ill. kisutni. Egy 10 k ellenallassal ez nem fog gyorsan lezajlani, es az atkapcsolasi idok alatt a FET disszipacioja nagyon meg fog noni. En a mellekletben levo megoldast hasznalom. A D2- R7 megy a FET G elektrodajara. A dioda segiti a G-S kapacitas gyors kisuteset, es ezzel a gyors lezarast. A zenerek hasznalata felesleges, ha a tap nem haladhatja meg A G-S max feszultseget.
Köszönöm a választ!
Kicsit siettem tegnap, de ma próbáltam kicsit rendbe szedni a rajzot. Kiegészítettem a diódával amit ajánlottál, és az ellenállások értékét is átírtam. A felső fetekhez is raktam be zénereket, mert a fetek max G-S feszültsége 20V az adatlap szerint, de itt a feszültségnövelés miatt akár 24V-is lehet, remélem jól gondolkodtam.
A Te altalad rajzolt meghajtas nem fog mukodni, mert a P-N emitterkoveto nem tud csak GND+0.6 volt es Uv-0.6 volt kozotti feszt kiadni. Jobb megoldas lenne amit en kuldtem, mert abban van szintillesztes, es a kimenofesz a GND es a tap kozotti feszt tud kiadni. Meggondolando meg a felsooldali agat P csatornas FET-el kialakitani. Esetleg keszen kaphato L298 alkalmazasa.
Ps : Az elektronikai rajzoknal illik berajzolni a vezetekek csatlakozasi pontjait. A rajzod igen nehezen ertelmezheto!
Átrajzoltam megint.
P csatornás feteket nem akarok alkalmazni, és az ic-s megoldások szóba sem jöhetnek a várható terhelés miatt. 30-50A folyamatos elviselése lenne a cél. Idézet: „P csatornás feteket nem akarok alkalmazni” Pedig ez igy nem igen fog jol mukodni. Gondolj bele: A felso oldali FET G-re kell kb 24 volt a bekapcsolashoz. Raadasul a motor induktiv teher, tehat adni fog tuskeket. Ennek a fuggvenyeben fog ki-be kapcsolni. Persze ha tennel diodakat parhuzamosan a FET-ekkel ez ugye megoldana a problemat. De akkor is necces ez a megoldas, inkabb P csatornasakat kellene alkalmazni, es ha nincs eleg nagy aramu, akkor tobbet parhuzamosan. Az eredeti ajanlas is P-N parossal dolgozik. Melle meg vigyazni kell a "Deadtime" ertekre is, mert konnyen ossze kapcsol az also oldal a felso oldallal, es rovidzarat csinal a tapon. Marpedig 30-40 A-es tap mar jelentos teljesitmeny, es a FET konnyen felrobban. Mondjuk a PIC tudhatja ezt a "Deadtime" vezerlest. Meg esetleg szobajohetne a tranzisztortemeto helyett FET driverek alkalmazasa. A MCHP gyart sok tipust. |
Bejelentkezés
Hirdetés |