Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
Nem, akkor lesz egész lépésben és igen, a Step, a 18-asra kell.
Köszönöm a segítséget.Most már világos. Akkor állhatok neki tervezgetni
Hali!
Bipoláris léptetőmotort szeretnék vezérelni pic16f84a-val ( 4 kimenettel). Ugye itt a tekercseken áramirány-t kell változtatni. Sokat olvasgattam már a témát de konkrét választ még nem láttam a kérdésre. Tehát a kérdés: Mit használjak pic után? L293B vagy SN754410NE? Két ic-t ezen az oldalon láttam: http://arduino.cc/en/Reference/StepperBipolarCircuit Valami gyors "paint" -es kapcsolási rajz jól jönne. Előre is köszi
Hello, én az L293-at használnám az adatlapján található 10. ábra szerinti kapcsolásban.
Üdv !
Szeretnék építeni egy léptetőmotor meghajtó áramkört és találtam egy ic-t TB6560 viszont úgy látom, hogy ez csak bipoláris motorokhoz jó. A kérdésem az lenne, hogy nincs -e ennek olyan verziója ami ugyanezeket a funkciókat tudja, csak unipoláris motorhoz való?
Üdvözlet!
Keresem a világ legegyszerűbb kapcsolását léptetőmotor (lehetőleg bipoláris) vezérlésére. A tápfeszültség 2 db. góliát elem. A legjobb lenne MCS51 alapú mikrokontrollerrel (+ szoftver), így lenne talán legalacsonyabb az alkatrész szám: 1 db kvarc, 2 kvarckondi, 4 meghajtó tranzisztor, 4 védődióda. Van valakinek ilyen megvalósítása? Esetleg PIC-cel... Egy mechanikus órához kellene, 18 másodpercenként egy léptető impulzus, (mivel 200 lépésesek a motorok) természetesen csak egy irányba. Kösz a segítséget és üdv!
hello ez a második shema kiprobált ?mert én ezt a kapcsolást összeraktam és nem nagyon akar forogni a motor,(már mint egyáltalán nem forog ) !esetleg valamilyen segitség jó lennen.6 kivezetéses a motor,szinek: fekete,barna,narancs,sárga,piros és fehér.
Sziasztok!
Egy kamera sint akarok tervezni, és a kezdő kérdésként felmerül, hogy milyen motor jó hozzá? Elvárások: - Sebesség állítása - teher elbírása (ez max 1kg) Van pár nyomtatóm itthon, és van ahogy néztem van egy ami elég szép példány. Kiinduló ami az ötletet adta:Videó
Ha nem fontos, hogy pontosan 325,468 mm -t mozduljon a kamera, akkor nem kell léptető motor, megfelel bármely más megfelelő teljesítményű motor, pl egyenáramú soros, vagy külső gerjesztésű motor, ezek könnyebben kezelhetők. (sebesség, irányváltás) Léptető motor csak akkor kell, ha pontos pozícionálás szükséges.
Érdemben semmi újat nem tudok hozzászólni, csak azt, hogy ez egy nagyon szép projekt. Én azért addig nem nyugodnék, amíg több dimenzióban nem tudnám mozgatni, vagy forgatni a kamerát...
hello valaki tudna segiteni ? van egy léptetőmotrom és azt szeretném valahogy meghajtani(programozás nélkül!!!)jó lenne ha valaki tudna segiteni ebben!33 ohm-os a motor
6kivezetéses és 12v-on dolgozik ,szinek:fekete,barna,narancs.....piros,sarga,fehér. Találtam egy shémát ezen a fórumon, ebben az a gond ,hogy a shémán levő szinek nem egyeznek meg az én szineimmel,de ha esetleg tud valaki jobb rajzot akkor azt is kiprobálom, és persze minel egyszerűbb legyen a rajz.Előre is köszönöm!!!!!!!
Ezt hogy érted, hogy "több dimenzióban mozgatni, forgatni" ?
Egy fix állványtartót tennék rá, és a kívánt pozícióba tenném, állítanám.
Mint pl a Technocrane nevű berendezés esetében. Keress rá, oké, ez hobbi, egyszerűsítsük le, pl ha a kameránk az egyenes vonalú mozgáson kívül el is tudna fordulni, akkor talán több szabadságot adna a művésznek. Én amúgy megfontolnám a léptetőmotor alkalmazását, igen kis fordulatszámot lehet elérni áttétel nélkül.
Üdv!
Megépítettem a kapcsolást, nem nagyon akar működni...  Igazából nem értem, hogy mér kell a 8 db dióda... Ezt ha valaki megtudja nekem mondani nagyon megköszönném. előre is köszi
Sziasztok,
A mellékelt képen látható kapcsolás megfogott, leginkább azért, mert elég sok mindenem van hozzá. A rajz több helyen is fellelhető a neten, de csak a rajz. Találkozott már vele valaki? Ha esetleg igen, és lenne nyák terv is hozzá, szívesen venném, ha megosztaná. Köszönöm.
Hello, a diódák a tekercsen keletkező nagyfeszültséget vezetik el. Ne hagyd ki őket!
Hello,
Idézet: . A szoftver nélkül nem tudod ezt használni(!) „fellelhető a neten, de csak a rajz.”
Ma kicsit tüzetesebben végig bogarásztam a CNC Zone illeszkedő topicját, úgy tűnik félbe maradt ez a dolog...
Rasiel által felvetett "AVR alapú egy MCU-s vezérlő" megoldáshoz (átterelve a "CNC építése házi alkatrészekből az alapoktól" topicból)
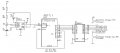
Igazából arra lennék kíváncsi, hogy ha nincs szükséged fél lépésnél többre, és modul szerű felépítést képzelsz el, ahogy írtad: "ami köré tetszőlegesen gányolhat bárki bármit" miért van szükség olyan részlet - mondjuk így - kitalálására, amit már kitaláltak. Tényleg kíváncsi vagyok rá, mert érdekel a kérdés, ez nem kötözködés. Szeretném megérteni. Mellékelek egy vezérlő részletet, ami pl. illeszthető lenne egy ilyen modul szinten összebarkácsolható dologhoz (forrás: CNC Zone)
Ötletadónak egy hasonló (20A / 100V) működőképes, megvalósított megoldás.
régi vágású jenki mentalitásom van, nem bízok semmiben amit nem én csinálok. Ebben a megvalósításban pedig sok az alkatrész
én arra gondoltam hogy egy AVR, 8 végfet, 8 optó, 1 áramszenzor, és talán egy not gate, és kész a kütyü ) lehetne benne fél lépésnél nagyobb felbontás is, de azt leprogramozni már bonyolult, főleg úgy hogy nem teljesen látom át a dolgot. Esetleg egy féle megoldást látok a nagy felbontásos vezérlésre, ez saját fejből kipattant dolog, lehet megint spanyolviasz  Ugyebár kell a bipoláris vezérléshez H híd. és ha a tekercseket külön külön vezérlem PWM jellel akkor megoldható lenne a mikrolépés... Ugyebár kell a bipoláris vezérléshez H híd. és ha a tekercseket külön külön vezérlem PWM jellel akkor megoldható lenne a mikrolépés...
Értem én, hogy gőzgép...
 Meg nem is azt írtam, hogy ezt tessék megcsinálni, csak ötletadónak. Arra gondoltam, hogy az L297-ben szépen ki van dolgozva a logika a fél lépésre is, ezért nem biztos, hogy érdemes azt még egyszer kitalálni. A meghajtás meg úgyis ugyanaz lenne. Abban viszont látnék rációt, hogy valami okossággal megfejelni a logikát, amivel az éppen használt környezethez lehetne optimalizálni, mint ezen a rajzon pl. Gondolok itt áram beállításokra, stb. Sajnos, úgy tűnik, hogy a hivatkozott kapcsolást vagy nem vitték végig, vagy nem publikálták a megvalósítást, így ez is csak ötlet.
nem tudom igazából, léptetőmotornál nem lenne sokkal egyszerűbb ha nem kellene felbontásról beszélni (elméletben) hanem az MCU adta lehetőségekhez képest maximálisan felbontani a vezérlőjelet, és azt küldeni a feteknek?
Én ehhez nem tudok érdemben hozzá szólni, csak gyanítom, hogy nem véletlenül alkalmazzák a felbontást (ugye itt a mikrolépesekre, 1/2, 1/8, 1/16 stb. gondolsz)
És ne gondold, hogy esetleg le akarlak beszélni, más is megcsinálta a mikrovezérlős megoldást a cél ic helyett. De engem pl. ez a megoldás is megfogott. És persze megoldás alatt az "elejét" értem; hogy mi lesz a "vége", akár 30A 100V, az most lényegtelen.
nem rossz, na majd fakítok valamit. bár szerintem akkor is oltás lenne például egy sima kétszáz lépéses léptetőt mondjuk 10.000 mikrolépéssel vezérelni
1/16 stb. Azért megnézném az 1/32-es lépést mi tudja. (akár mérni is max egy méteres pálcával a végén lehetne
)
Az már igaz, hogy egy alapból 1,8°-os motornál 1/32 lépésenként ~0,98 millimétert mozdulna az a méteres pálca. Mármint a pálca vége, a méteres sugarú kör kerületén
De ez nem jelenti, hogy ne lehetne megvalósítani a 10.000 mikrolépéses vezérlést, ami gyakorlatilag analóg vezérlésként lenne érzékelhető. Erről meg az jutott eszembe, hogy ez már egy frekiváltó alapja is lehetne, de akkor meg már nem léptecsről beszélünk  Visszakanyarodva az egészet kiváltó gondolathoz: legyen elég az egész és fél lépés, de hangolható legyen az adott rendszerhez.
annó gondolkodtam rajta hogy sima kefés motorral építek CNC-t de lebeszéltek róla... mert hogy az mennyire rossz
Ha egyszer eljössz hozzám, mutatok igazi ipari léptetővezérlőt. 1/256 lépés. A 200 lépéses motornál 51200 lépés egy fordulat. Jól megválasztott áttételnél nem zavarja az a tény, hogy a motornak 600 rpm a max. fordulata.
|
Bejelentkezés
Hirdetés |