Fórum témák
» Több friss téma |
Fórum » Robotika kezdőknek
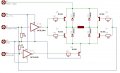
Íme az egyik motor H hídjának kapcsolási rajza, legalábbis átrajzoltam azokat a külömbségeket, amelyek az eredeti kapcsolási rajzhoz képest nálam más. Az L293D ellen szól nálam, hogy szeretek sok mindent magam összerakni, és egy H híd nem tünt legyűrhetetlen akadálynak. Lehet, hogy a második robotnál, vagy később, ha ezt továbbfejlesztem, áttállok rá, de az elsőhöz még szerettem volna egy sajátot összedobni.
Tehát próbáljam meg az inverter kivezetéseit a tápra húzni pl egy 10 kOhmos ellenállásal? Ha igen, amint feltöltenek a ceruzaakuk, kipróbálom.
Ha már végig akarod járni az utat (nagyon helyes!
 ), akkor inkább nézd meg ezt a kapcsolást! Az invertert ugyanúgy belerakhatod mint a sajátodba. ), akkor inkább nézd meg ezt a kapcsolást! Az invertert ugyanúgy belerakhatod mint a sajátodba.Maradva a te verziódnál, ne az inverter kimenetét húzd fel, hanem a pnp tranyók bázisát egy-egy 1k-val, és ami most bent van 1k, azt cseréld ki 150 ohmra! Ugyanígy az npn-eket meg akár le is húzhatod testre. De ez csak opció. Így a pnp alapból megkapja a tápot, vagyis kikapcsolt állapotban van, az npn pedig testre van húzva, az is kikapcsolt. A kimenet tehát lebeg, a bement pedig ha jól gondolom, akkor beáll fél tápra. Ha most a vezérlő lábat lehúzod testre, akkor a felső (pnp) tranzisztor bázisát lehúzod a tápról, ezért az kinyit, megindulhat rajta az áram. Ha nem le, hanem felhúzod, akkor pedig az alsó (npn) kezd el vezetni, tehát nyelőként viselkedik. Nagyjából ugyanígy működik az a kapcsolás is, amit linkeltem, csak nekem szimpatikusabb. Ha valamit benéztem, akkor bocs, már kezdek fáradni
Az alsó engedélyező tranzisztort ha ilyen (NPN/PNP) szerintem rossz helyre raktad. Fel kellene tenni a táp bemenetre, nem pedig a kimenetre, szerintem nem tud eléggé kinyitni. Legalább 1Vot veszítesz rajta.
Saját elméleti véleményem, sok tapasztalatom nincs a dolgokkal, de elvileg helyes a megítélésem.
Az Arduino a soros kameraval a SoftSerial szoftveres soros porton keresztul kommunikal (az egyetlen hardveres soros borton a bluetooth modul van). A kamera as a softserial max sebessege miatt nem nagyon lehet sokkal gyorsabban kepeket kesziteni (115200 baud-on es 160x120 pixeles keppel lehetne kb 1-2 masodpercenkent kepet kesziteni).
Na mindegy, marad a LinkSprite kamera ennel a robotnal...
Ööö.. igaz, meg is feledkeztem arról a tranzisztorról..

Köszönöm a leírást, szerintem jövő hétvégén (mivel ma már fáradt vagyok hozzá, meg az 1kOhm alatti ellenállásokból sincs elég hozzá) átalakítom. KTobi ötletét is kipróbálom, mert valóban a motorokra csak a tápfesz 5.5 -jából kb 4.3 jutott, és lehet, hogy pont ez volt a baj, amit leírt. Ezt az észrevételt is köszönöm. Ha végül sikerül ekészíteni, akkor itt közzéteszem, valamint az anyagköltséget is, hisz a célja az egész munkámnak, hogy megmutassam, kevés pénzből is lehet csinálni robotot.
ÜDv: EGon
A kevés pénz azért nagyon relatív. Nem mindegy, hogy mit tud... Viszont kíváncsian várom a leírást.
Azt a tranzisztort mindeképpen tedd át felülre, mert az irányváltó tranzisztoraid nyitási feszültségét eltolja! A szokásos 0.7V helyett rossz esetben akár több volt is lehet!
Én inkább egy pnp tranzisztort tennék a motor betápjára, aminek a bázisát felhúznám motor_betáp értékre egy mondjuk 1k ellenállással. Amikor be akarod kapcsolni, akkor egy akármilyen kapcsoló elemmel lehúzod, és így biztosan kapcsolni fog, meg a többit sem kavarja össze. Ni, még a végén összehozunk valamit 
Sziasztok!
Egy atmega48-as hardware-es pwm programozásába kezdtem, az első két csatorna tökéletesen működik az alábbi kóddal(+1db teszt led)
A vezérlő rendelkezik további 4db pwm kimenettel. Ezeket hogyan tudom beállítani? Valaki tudna segíteni? Előre is köszönöm! Zoltán
Szia!
Az altalad mellekelt kodban a 16 bites Timer1-el allitottal elo hardveres PWM jelet a szervok vezerlesehez. Az a gond, hogy a masik 4 hardveres PWM kimeneten a jelet ket db 8 bites Timer allitja elo (Timer0 es Timer2). Ha egy szervot akarsz egy 8 bites timerrel eloallitott hardveres PWM-mel vezerelni, akkor az eleg durva felbontasu lesz, mert csak kb. 12-15 poziciot tudsz a szervon beallitani. Szervovezerles 8 bites Timer2-vel: Bővebben: Link Ha tobb szervot akarsz nagyfelbontassal vezerelni, akkor egy Timer interrupttal idozitett szoftveres PWM-el jobban jarsz. Az elv ebbol kikovetkeztetherto: Bővebben: Link2
Helló Mindenkinek!
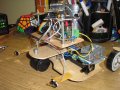
Az adott tanácsok jónak bizonyultak, a problémám megszűnt, és be bírtam fejezni a robotomat. Ezúton is köszönet érte. Mint ígértem, ha elkészül, beszámolok róla itt: Egy kis felvezetéssel kezdeném, hogy aki robotépítésnek adja a fejét, lássa, nem olyan bonyolult és nehéz, csupán elhatározás és türelem kérdése. Jómagam január közepén terveztem el, hogy a szobám nem teljes egy robot nélkül. Bele is ástam magam az irodalomba, s már ekkor kikötöttem pár dolgot: mikrovezérlővel működő, programozható robotot szeretnék, fejleszthető legyen (tehát az alkatrészeket szétszedhetőre lettek tervezve), de az első verzió legyen egyszerű, és meg lehessen rajta tanulni az alapokat. A voksomat egy kétmotoros, bolygókerékkel ellátott robot mellé tettem le, amely két mikrokapcsolóval érzékeli, ha nekimegy valaminek, és új irányban próbál meg tovább menni. Amit még fontosnak tartottam az az ár, amiből az alkatrészek kijönnek. Találtam ilyen 50 dolláros, meg 30000 Ft-ból kijövő egyszerű robotokat, de ahogy elnéztem őket, mennyi mindent készen vesznek meg hozzá kétszer-háromszor akkora árból, mint amivel az adott alkatrész összerakható, eldöntöttem, megmutatom, hogy sokkal kevesebb pénzből, de több munkával is létrehozható ugyanaz. A robothoz szükséges nagyobb, drágább alkatrészek(motorok, mikrovezérlő) kiválasztása után az árat 4000-5000 Ft közé lőttem be. Ez lényegesen kevesebbnek mondható a fentebb írtaknál, viszont ezen az áron remélhetőleg egy jó strapabíró és fejleszthető robotot kapok. A cél gyakorlatilag ezzel megvolt. Egy robot építéséhez kell mechanikai, elektronikai és programozási ismeret. Az első és az utolsó szerencsére nekem megvolt (mechanikai rakétamodellezésből, programozási a gimnáziumból: pascal, C, C#, Assembly, Prolog). Az elektronikai ismereteim annyi volt, amivel régebben összeraktam pár 555 timer-ral működő időzítőt, tehát az alapok megvoltak. Viszont a mikrorvezérlőkhöz nem értettem, így nekiláttam bepótolni ezeket az ismereteket. PIC-el szerettem volna megcsinálni, erről találtam jó magyar nyelvű leírásokat, itt hobbielektronikán is, valamint programozni PIC-et lehet a MikroPascal nevű szoftverrel (sokan leírják a Pascalt, de én nagyon szeretem). Persze a programozáshoz kellett egy égető, ez végül egy LPT portra szerelhető Oshon féle égető lett, az égető program pedig a watt féle WPB. Mivel nem akartam egyből a mély vízzel kezdeni, az égető mellé terveztem egy próbapanelt a 16F628A PIC-hez, amin gyakorolhattam, megismerhettem az alapvető PIChasználati dolgokat, úgymint ledvillogtatás, ledsorral futófény, hangkeltés, gombkezelés, valamint a megszakítások kezelését. Ezután sem éreztem magam készen egy robot elektronikájának készítéséhez, így előbb kerestem valami mást, amivel gyakorolhattam. Ekkor készítettem egy bináris órát, ami jó szórakozásnak tűnt, és elég sok tapasztalatot szedtem össze vele. Ez az öntanítás időben, javarészt hétvégéken dolgozva rajta egy hónapot ölelt fel. Végül nekiláttam a robotnak. A végeredmény a csatolt képeken látszik. Elég jól illeszkedik az elvárásaimhoz. Mivel az LPT portos PIC égetők érzékenyek a kábel hosszára, és a robot nemigen fér oda a számítógép mellé, úgy terveztem meg, hogy a PIC egy adapteren helyezkedik el (4., 5. kép). Ez könnyen levehető a robotról a tüskesornak köszönhetően, és könnyen ráhelyezhető az égetőre. Így a PIC lábait sem kell nyomorgatnom. Egy másik nyákra (a nyákok inchpapírral kézzel lettek tervezve és rajzolva) kerültek a H-hidak, ezzel voltak problémák, amit köszönve nektek, megoldódtak. A harmadik nyákon van a tápellátás (9V ből +5V), itt van a főkapcsoló is. A PIC panelján látható sok szabad tüskesorokra egyéb dolgokat is felpakolhatok (itt jelenik meg a továbbfejleszthetőség). 3 illetve 4 AA ceruzaelem látja el a motorokat, egy kapcsolóval válthatjuk, hogy 3-ról, vagy 4-ről üzemeljen (kényelmi okok, valamint inkább 3 elemmel használom, mert 4-nél elég gyors, és olyan durván neki tud menni a falnak, hogy a mikrokapcsolók letörnek). A kerekeket is magam csináltam PVC csőalkatrészekből. Ezt lehet, hogy majd utólag kicserélem, de egyenlőre a rávitt gumicsík nagyon jó tapadást biztosít. A robot neve KITT-E (Kitti) lett. S most a felhasznált anyagok árlistája: 2 db áttételes modellmotor: 1500 Ft 1 db PIC16F628A-I / P : 605 Ft 1 db74 LS 04 6x1 inverter: 225 Ft 1 db DIL 18 Lemezes IC foglalat (Low Cost): 19 Ft 1 db DIL 14 Lemezes IC foglalat (Low Cost): 16Ft 1 db 78 L 05 Feszültségszabályzó IC, 5V/100mA: 32Ft 1 db KNX 2 nyelves, két áramkörös kapcsoló: 134Ft 1 db 4 MHz Kvarc: 130 Ft 6 db BC 369 PNP tranzisztor: 179 Ft 4 db BC 368 NPN tranzisztor: 148 Ft 2 db DM-03S-2P Mikrokapcsoló nyelvvel: 241 Ft 1 db 9 V-os elemcsatlakozó: 88Ft 1 db AA elemtartó 3 részes 150Ft 1 db AA elemtartó 1 részes 89 Ft 2 db két bemenetes sorkapocs: 250 Ft Felhasznált egyoldalas nyáklap (terület alapján): 150 Ft Falemez: 75 RSD (200 Ft) Bolygókerék: 50 RSD (125 Ft) 8 db 150 Ohm ellenállás: 37.6 Ft 11 db 1 kOhm ellenállás: 51.7 Ft 5 db 10 kOhm ellenállás: 23.5 Ft 2 db 220 Ohm ellenállás: 9.4 Ft 4 db 4.7 kOhm ellenállás: 18.8 Ft 10 db 1N4001 dióda: 32 Ft 1 db 3 mm-es zöld LED: 14 Ft 3 db 100 nF -os kerámia kondenzátor: 35 Ft 2 db 22 pF ?os kerámia kondenzátor: 20 Ft 1 db nyomógomb: 43 Ft 1 db 10 ?F ?os elektrolit kondenzátor: 8 Ft 1 db 330 nF -os kerámia kondenzátor: 12 Ft Valamint a tüskesorok (apa-anya páros), kábelek, csavarok, kerékhez PVC alkatrészek ~ 400 Ft _______________________________________ összesen: 4986 Ft Persze ez részben becslés értékű, hisz rengeteg mindent találtam itthon (pl az elemek nincsenek felsorolva). Az árak java része a HEstore oldaláról lestem (áfás árak), de csak néhány dolgot rendeltem onnan, a többit javarészt Szegeden szereztem be. Az elvárt árcélt épphogy, de teljesítettem. Ha még olcsóbban szerettem volna kihozni, akkor a strapabíróságot, vagy a szétszedhetőséget kellett volna feladnom. De így is megvagyok elégedve vele. Jól látható, hogy egy ilyen egyszerűbb robotot elég kis költségvetésből is össze lehet állítani, csak türelemmel és kitartással kell rendelkeznie a kezdő robotépítőknek. És fontos a tervezés, a robotépítésnek majd 90 %-a ebből áll, miután az ember részletesen kigondolta, utánajárt a dolgoknak, az építés meglepően rövid idő. A következő biztos lépés a fejlesztésében a mikrokapcsolók lecserélése infravörös távérzékelőkre. De előtte még egy dolgot meg kell oldanom, és ezért kérném újból a segítségetek. Szeretném, ha lassabban is tudna haladni a robot, ehhez PWM jellel szeretném hajtani. A H hídban vannak működő ki-be kapcsoló tranzisztorok (stop-előre parancs működik), a programot is megírtam hozzájuk, viszont valamiért nem akar működni a lassan haladás. Íme a program:
Ha a megszakítás 1 milliszekundumnál van, akkor az elore_pwm meghívásakor nem történik semmi, megáll a robot, ha 2 milliszekundumra állítom (persze a határértékeket is ehhez igazítva), akkor pedig megy, de sebességváltozás nincs, ugyanolyan hevesen halad előre. Szerintetek mi lehet a probléma? Ha az elektronika miatt nem lehetséges, akkor mind1, valamikor készítek egy másikat, de szerintem a programmal van a gond. A válaszokat előre is köszönöm! Most, ahogy nézem, elég terebélyes hozzászólásnak sikeredett . Ha lenne több időm, meg jobban dokumentáltam voltam képekkel, akkor akár cikknek is megirhattam volna talán. Remélem majd sikerül néhány kezdő robotépítőnek motivációt adnom vele, és útmutatást. Vélemények jöhetnek, szívesen veszek rosszat, s jót egyaránt .Üdv: Egon
Helo!
Grat. a robotodhoz ügyes vagy. De azért nem értek mindennel egyet.(Így a 3. robotom építése vége felé) Az 5000ft-os határ nem megvalósítható ha ennél egy picit is többet akarsz... Egy BT modul kb ennyi. Vagy egy sharp távmérő is 6000ft. Szóval a 30.000ft-os határsokkal reálisabb. Egy lipo aksi is 3-4e ft. Az elem nem a legjobb áramforrás(hosszútávon drága). De csak így tovább. Csak arra próbálok rávilágítani, hogy egy kicsit több pénzt kel rászánnod, ha komolyabbat akarsz.
Köszönöm a gratulációt! Igen, tudom, hogy ha komolyabbat akarok, akkor többet kell rááldoznom, de ez nem is baj, ez a normális. Az elsőnél volt csak cél az ilyen alacsony költségvetés, hogy látható legyen, hogy ilyen kezdő tanuló és kedvcsináló robotot kevés pénzből is lehet építeni. Szerintem befogok itt számolni róla, miként haladok
.KTobi: Igen, ismerjük egymást
Hello!
Valaki foglalkozott már RHex robot építésével? Nagyon tetszik, ahogyan a lábát kapkodja. Itt egy videó aki nem ismeri. Jó lenne valamit tudni, róla mert az áttételes motorok nem olcsók... üdv.:Matyko
Megnéztem a videót.. Először kicsit esetlennek tűnt, de az ahogy az égvilágon mindenen átmegy, az nagyon meggyőző.
Ha kicsit utananezel, van oolyan is, ami ketlabon megy... Nem hiszem, hogyesetlen...
Nem leszólni akartam, ezért mondtam, hogy esetlennek _tűnt_ ! Mindazonáltal még mindig a tavi futó gyíkra emlékeztet (most meg nem mondom hogy hívják), amelyik a víz felszínén fut. A linkelt videó végén is van két lábon járó scene
Sziasztok!
Pozíció érzékelést szeretnék mágneses elven megvalósítani. Vettem hozzá SS41 Hall szenzorokat, a karra, aminek a pozícióját kéne tudni ráraktam egy erős mágnest. Mikor a mágnes a hall szenzor fölé kerül, az jelzi, hogy ott van. Mikor viszont már elhaladt a mágnes, a hall szenzor még mindig azt jelzi, hogy ott a mágnes. Szerintetek mi lehet a gond? (szoftveres hiba egyenlőre ki van zárva, mert ha csak 1 db ledet teszek a szenzorra, akkor is ezt csinálja) Valamivel kinyírtam őket? Segítségeteket előre is köszönöm!
Sziasztok. Olyan kérdésem lenne, hogy valaki rendelt-e már a robotshop.com-ról? Ha igen milyen gyors a kiszállításuk? meg még lenne pár kérdésem ha van ilyen személy
Mit szeretnel rendelni?
Falbol rendeltem egy ChipKIT MAX32 kartyat es nem semmi szallitasi koltseget ad hozzatok, Magyarorszagra. 24.29Euro a sima posta es 58.80 az UPS. Itteni viszonylatban is **** draga. (Hozzank 18.68 a posta es 43.95/98.35 az UPS Standard/Express)
valószínű egy ilyet: http://www.robotshop.com/dfrobot-4wd-arduino-mobile-platform-3.html ; meg még pár szenzorokat tudom h 25Euro a postaköltség, de milyen gyorsan szállítanak?
Ment kozben talaltam egy UK-s oldalt nezz korul, hatha...Bővebben: Link
hát itt a robot-kitek nem a legjobbak :/
Nem lenne olcsobb Lego alapra rakni?
Kozben megneztem eBay-en is, Bővebben: Link EUR 44.84+ EUR 15.21 posta, hozzank Irorszagba. A tavolkeletrol nekem altalaban 7-10 nap alatt itt van. |
Bejelentkezés
Hirdetés |