Fórum témák
» Több friss téma |
Fórum » Propeller Clock
Miért nem készítesz akkor egy kétszárnyú szimetrikus rotort melyen ha a ledek ugyanazon a köríven vannak akkor elég a fele fordulat is mivel egy kör alatt két led tudna felvillanni,vagy eltolni az egyik felén egy led mérettel a rasztert és így lehetne ritkábban is rakni a ledet,vagy a felbontást megnövelni (nem lenne a ledek közt "csík"lehetne 128 ledes is )
Ha a raszter el lenne tolva akkor is elég lenne a fele fordulat ha a 180 fokkal eltolt offset lenne és felváltva tenné be a sorokat akár egy tv készülék amit a szem nem lát vibrálásnak.Szerintem ez alkalmazható lenne bármilyen is legyen a kijelző szép stabil lenne a kép már alacsonyabb fordulaton is..
A hozzászólás módosítva: Feb 19, 2016
Sziasztok.
A Dcf77 modulnál a DCF kimenetet vagy az invertáló DCF kimenetet kell bekötnöm a bázisba? Feszültséghúzó (pull up) ellenállás szükség esetén. 1-test 2-1,2-15 V=tápfeszültség 3-DCF kimenet 4-invertáló DCF kimenet A 3. és 4. kimenetet nyitott kollektorú npn max.30 V 1mA. Ennyi van összesen a lapjára írva amit adtak mellé. A hozzászólás módosítva: Feb 20, 2016
Sziasztok,van egy hibás 18f2550-es pic-em amin az USB portja rossz és nem kommunikál a géppel.
Az órának minden funkciója megy vele csak a gép nem ismeri fel mert egyszer sikerült az USB B csati fém házát valamivel összezárnom. A kérdésem az lenne,hogy ez a hibás Pic attól még felhasználható BTM modulhoz,vagy kell,hogy működjön az USB része is???
Az USB és az UART egymástól függetlenül (akár egyszerre is) használható.
Köszönöm,akkor egy ilyet beszerzek majd.Próbálkoztam a gagyibb kínaikkal ami RS232-es,de működött egy darabig és bemondta az unalmast

A bázis panelről a két szintillesztő tranzisztort a hozzájuk tartozó ellenállásokkal, diódákkal, stb. le kell hagyni.
A hozzászólás módosítva: Márc 4, 2016
Egy az egyben kötöttem rá a pic RX,TX lábára egy ilyen szintillesztővel,kipakoltam mindent és egy az egyben az RS232 csatlakózóig elmegy a pic RX,TX lába és úgy kötöttem be az illesztőn keresztül.
Működött is szépen,de a kínai valamiért feladta a harcot. Engem ez a UART zavart most össze,hogy ezzel használható-e. Meg van olyan BTM ami csak Slave és azzal ugye nem tudnám használni.
Hello
a BP103-as fototranzisztort mivel lehet helyettesíteni mert sajnos nem jutok hozzá sehol ?  A hozzászólás módosítva: Márc 4, 2016
Helo(!) itt nézd meg. : Bővebben: Link
csak egyszerüen igy persze ellőtte a többi.  A hozzászólás módosítva: Márc 4, 2016
Sziasztok!
Egy éve megépítettem a saját propeller órámat, amit fényújságnak használtam, viszont már akkor is zavart, hogy néha el-elmozdult a szöveg, tehát olyan mintha az IR led és a fototranzisztor nem pont mindig ugyanott találkozna hanem egy-két milliméterrel arrébb és így elég hazárdos... van amikor egész peridódikus a dolog... Ez csak a kis mechanika ütéstől-mozgástól lehet? a fototranzisztor egyébként a propeller lapátján van és lehet az is bele zavar kicsiket... Tapasztaltatok hasonló jelenségek, ha igen akkor hogy sikerült megoldani??
Sziasztok.
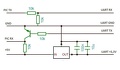
Valaki rápillantana nekem erre a rajzra,hogy így jó lehet a szintillesztés a bázishoz?? Köszönöm.
Valahogy így kéne illeszteni.
Sziasztok.
Ezt a modult,hogy tudnám úgy beállítani,hogy a Gép Com porton ismerje fel úgy mint EZT ? Addig sikerült eljutnom,hogy terminál programból mindent tudok a modulon állítani,de csatlakozni csak akkor lehet a modulhoz ha Command módba van és kiadok neki egy "A" parancsot,utána egyszer tudok rá csatlakozni,ha megszakítom a kapcsolatot akkor ismételten kell neki az "A" parancs. Attól tartok,hogy ez a modul nem is használható az órámhoz.
Tervezem az új rotort. Azon töröm a fejem hogy teszek egy gyro szenzort a rotorra ,hogy könnyen lehessen a balanszolást megcsinálni. Ledekkel lehetne jelezni hogy mikor jó a súlyelosztás vagy hova kell még súly. Kicsit olyannak képzelem mint az autókerék centírozást.
Namost ez az ötlet......de nem tudom hogy egy mezei gyro szenzor elég érzékeny e ehhez a méréshez. Mert ugye mit kell mérni. A rázkódást kéne, tehát az egész rotor és a hozzá tartozó motor stb. oldalirányú elmozdulását(igazából ez gyorsulás) ,aztán még kell az elfordulási szög(ezzel nem lehet gond) Szóval szerintetek meg lehet ezt csinálni? Vagy másképp kéne? Az öltet még nagyon kiforratlan, szeretnék véleményeket,javaslatokat. köszönöm
Szia.A borsodircmodell.hu oldalon kisérletezik józsi barátom egy légcsar cetirozóval. ő ugy emlékszem accelerometerrel próbálkozik. Otthon majd ránézek és adok linket.
nézem köszi.
Tervezéssel itt tartok, 2 layer-en összejött és megvan a cumis rész. Eddig ez a legkisebb rotorom:
Üdv szeretnék ilyen órát készíteni smd alkatrészekből es rgb ledekből avrrel. Az elvi működésnél elakadtam. Azt értem, hogy a propeller a fotótranzisztorhoz képest időzít, amit ugye a bázis vezérel, de azt nem igazán értem hogy a bázis mi alapján állít be fix fordulatszámot, mert ugye azon nincs fotótranzisztor. Honnan tudja mennyi forog a ventilátor? Illetve még egy kérdésem lenne, miert kell az a specialis stab. Ic? Az lm29xx(hirtelen nem tudom a típusát). Miért nem elég csak simán egy fet és pwmmel szabályozni a fordulatszámot?
Választ előre is köszönöm.
Szia!A bázis nem fix fordulatot tart csupán ki/be kapcsolható az lm2941 vezérlővel mely egy potméterrel beállítható a max fordulat is (12V mivel a bázis tápja lehet magasabb is és a 12V motor elhalálozna). A 18f2550 bázis már ezt pwm-el is képes vezérelni így a fordulat állítható a bázisból. Egy fet is megteszi ha a maximum fordulatot nem kívánod szabályozni.A bázis nem tudja mekkora a rotor fordulata nem méri.Vagy egy fix helyen lévő infra led jelét érzékeli egy fototranzisztor a rotoron mikor elhalad felette,vagy mágnes és hall szenzor megoldás adja az offsetet.Az infra led semmilyen információt nem ad a fototranzisztornak és a rotornak csak a fototranzisztor mikor elhalad a fényébe kerül átbillenti a kontroller portján a jel szintjét.
A hozzászólás módosítva: Márc 12, 2016
Köszönöm a kimerítően gyors válaszod, én is erre gondoltam, csak több helyen olvastam, hogy a bázis vezérli a motor fordulatszámát és nem igazán értettem, hogy miként. Igazából nincs is értelme, úgy is a rotor időzít mindent, és bizonyos határok között még jó is ha max fordulaton megy a ventilátor, hisz akkor villódzásmentes.
Csak egy 12V pc venti nem biztos,hogy sokáig bárja a 15V feszültséget. Nálam a nagyobb teljesítmény átvitel miatt (kly órája) egy 19V notebook tápról ment a bázis és ezt már nem bírta volna biztosan a 12V moci.
Még egy kérdés, a légmagos trafót ugye egy fet kapcsolgatja x Khz-en és azt írják hogy a bázis azt is változó kitöltésű tényezőjű impulzusokkal kapcsolgatja, de ugye semmilyen visszacsatolás nincs a szekunder oldalról. Honnan tudja a bázis milyen kitöltési tényezővel kell kapcsolgatni, hogy a megfelelő teljesítmény átvigye? (mert ugye ha jól gondolom ezt tekinthetjük egy kapcsolóüzemű tápnak.) Erős a gyanúm, hogy az is fix pwmmel van hajtva.
Nincs visszacsatolás a szekunderről.A PWM kitöltéssel és a tápfeszültség nagyságával lehet változtatni a kívánt teljesítményt.
Szia
Igazából ez lehetne fotdítva is. Pl. A rotoron csak egy infra led es a bazison egy ftranyó. Ekkor a bázisbak kéne nagyon pontos rpm et tartani mivel ekkor előre fixált időzítések lennének a rotorban. Szvsz így is meg lehetne csiálni, van előnye is hátránya is.
A Bob Blick féle rotorokban egy időmérésen alapuló algoritmus állítja be az időzítéseket. Fototranzisztor vagy Hall szonda segítségével méri egy körbeforulás idejét és ebből az időből állítja elő a pontok vezérlésének idejét. A kerekítés miatt maximum 1/10 pont időnyi elcsúszás lehet a kör végére. Sajnos a régebbi órádban csak megfelelő fordulatszám beállítások esetén ért össze a kép a körben.
|
Bejelentkezés
Hirdetés |