Fórum témák
» Több friss téma |
Ha lézershow-hoz lesz, akkor
nézz el Csibi honlapjára! Ott van PIC-kel vezérelt lézershow, forráskóddal!
Két PWM a két motorhoz biztosan elég.A polaritás váltást un H híddal szokták megoldani elektronikusan ,de a jelfogó is teljesen tökéletes erre a feladatra (közvetlenül a motoron válsd a szabályzás után akkor nem kell a másik irányra másik szabályzó)
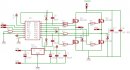
Arra gondoltam, ami a rajzon is van. Motoronként egy-egy PWM elég, amelyiken irányt is váltani kell, oda a relé a teljesítményágba kerül, a meghajtófokozat után. Így, ha a relé megfelel, H-híd sem kell, csak egy megfelelő tranzisztor, az irányt pedig egy digitális kimenet jelöli ki.
Udv, a tranzisztorok 15A telj. voltak, a motor max arama nem lepte tul a 12A-t teljes terhelesnel (lefogva). A diodakat bekotottem, de nem mukodott. Utananeztem es ahogy a TIP120 tokozasaban van ugy kotottem. Ugy mukodott, de dierkt vezerlesnel is eppen csak forgott a motor. Probaltam 1N4004 es valami kinai tapbol kiszedett gyorskapcsolasu diodakkal is. A nevuket nem tudom, de 1A 1000V es 150ns
Valoszinu, hogy az indukcios fesz tette tonkre az egyik fel hidat, mert levettem a diodakat az egyikrol. Viszont sehogy sem mukodott akarhogy kotottem a diodakat.
Igen, ezt a pic-es fordulatszabályzót már néztem. Majd haverom beleégeti a pic-be én meg megcsinálom a nyákot, csak itt nem tudom, hogy mi lesz, hogyan vezérli...
Mert én amit kiszámoltam motor 1 és motor 2-nél feszültségeket, ha azokról megy a motor, akkor rajzolódik ki alakzat csak... Itt ennél, amíg ki nem próbálom, foglamam sincs, milyen gyorsan, hogyan változik a fordulatszám, stb Ha megmondom, hogy milyen PIC-kel lennem egcsinálva az egész progi (amit haverom írna meg) akkor valaki megtudná neki csinálni a pic köré a kapcsolási rajzot? Mármint, ez a fet-es erősítés is, hogy ne nyírja ki a motor az pic-et Az egyik motor 250, a másik 350 mA-ert vesz fel max
Van fent Csibi-nek videója is, hogy hogyan működik.
Gondolom én, hogy itt: Bővebben: Link kellene lennie a videóknak, csak nekem simán a felirat van, nem link. Máshol meg nem találok videókat. Úgy egyátalán a weblapon. Amik meg a megfelelő kategória alatt vannak, a felsorolás elemei nekem ne linkeke, hogy megnézhessem a videót. Esetleg belinkelnéd?
Bővebben: Link
De ez már régóta off, ebben a topicban...
Az a lényeg hogy mindenféle PWM nélkül direkt vezérelve a tranzisztorokat a motor SZINTE teljes teljesítménnyel forogjon.
Érdemes a hidat négy felé bontani,háron tranzisztort kikötni azután az éppen vizsgált ág nem vizsgált tranzisztorát átkötni ,hogy a motor forogni tudjon, ezután annak az egy tranzisztornak adni vezérlést a pic felöl (de pic nélkül !! direkt egy soros diódán keresztül) ,megnézni hogy így tudja e a közel max fordulatot terhellést (ha a tranzisztor melegszik nagyon akkor nagyobb bázisáram ill másik tranzisztor ) A tranzisztoron semmiképpen ne essen több mint 1-2 V ill ha lehet még kevesebb. Ha minden tranzisztorral ezt eljátszottad,utána jön a félhíd próba,még mindíg pic nélkül.(az összetartozó tranzisztorok vezérlése ,elvileg erre is szépen kellene a motornak forognia) mind a két félhíd kipróbálása után az egyik oldal ismét kiköt,belerakod a picet megnézed ezt az irányt jól szabályozza e ,majd a másik oldalt ugyanígy,tehát kikötött egyik oldallal. Ha így nagyon melegszenek a tranzisztorok ill nem forog megfelelően a motor ismét csere (túl lassúak) Ha ezek így jól mennek mindkét oldal visszaköt és jöhet a főpróba.(ha így elszáll valami akkor az szinte biztos hogy szoftver hiba. A diódákat is a motor áramra méretezd az 1A nagyon kevés (legalábbis szerintem) a feszültség meg 24-30 v ra szerintem elég a 100V os dióda.
Ezeket az alakzatokat szerintem nem a pic-kel csinálja hanem a rajta lévő potméterekkel (nekem is így van, ezért kellene PIC-esre)
Valaki írta, azt hiszem, hogy kobold, hogy úgy nem elegáns, hogy a feszültséget változtatom... Akkor mit is kellene, kicsit (számomra) érthetőbben eltudná mondani valaki?
Amit írtam, végső soron ugyanúgy a feszültséget fogja változtatni, csak nem állandó jelleggel, hanem az idő szerint integrálva.
Képzeld el, hogy egy négyszögjel-generátor hajtja a motort: amikor magas szintű a jel, a motor bekapcsol, amikor alacsony, akkor nem. Ha elég magas a jel frekvenciája, akkor a motor a tehetetlensége miatt nem áll meg két impulzus között, hanem továbbfordul, így gyakorlatilag folytonosan forog. A kitöltési tényezőt változtatva, vagyis azt az időarányt, amíg a jel magas az alacsonyhoz képest egy perióduson belül, változik a be- és kikapcsolt idők hossza; ha megnő a szünet, és lecsökken a jel szélessége, lassabban forog a motor. Ugyanazt éred el vele, mintha a tápfeszültség változtatásával állítanád, de itt mindig a teljes tápfeszt megkapja, csak impulzus-jelleggel.
Szerintem értem, hogy mondod, nem tudom, hogy lehet kivitelezni. Ez még a jövő (közeljövő) zenéje lesz
Ha feljön az oldalra Csibi, majd Ő megmondja, hogy a PIC vezérel mindent!
ugyaninnen idézek: "PIC-el valtogatja magatol." - tehát az effektek magától is váltanak, a potival manuálisan lehet szabályozni a motorok fordulatszámát. Egyébként mi értelme lenne a PIC-nek benne ? :miaz:
mellékletben a pdf dokumentum eleje.
hmm..
Idézet: „Nem muszaly PIC-et beepiteni, mehet csak egyszeruen potival (csak akkor manualisan kell kivalasztani a neked tetszo effektet), PIC-el valtogatja magatol.” 
Igen, csak ezzel itt nekem az a gondom, hogy...
Neki a pic programja, amit közzé is tett, az pont kivetíti az alakzatokat... (Neki) De nekem már nem fogja, mert lehet, hogy más motorokat használunk (ami szinte biztos) de tegyük fel, hogy ugyanolyat használunk... Akkor sem fogja nekem pont az alakzatokat kivetíteni a falra, mert az attól is függ, hogy ő mennyire döntötte meg a tükröket... ha a legapróbb eltérés van, akkor már nem lesz jó (nálam) Ezért szeretném én úgy megcsiálni (tatni), hogy lemértem a motorok feszültségét, melyik alakzatnál mekkorát kapnak és ezeket változtatni.
Rendben értelek!
Sok sikert a lézershow-dhoz!
Köszi!
Lézer show - topicba leírtam a terveimet  Jó hosszúra sikeredett Jó hosszúra sikeredett
Sziasztok!
A téma úgy látom már jól ki lett vesézve. Mint ahogy már mindenki elmondta az áramkört, lehet Manuálisan és PIC által is vezérelni. A manuális vezérlés a potikkal történik, a PIC-es vezérlés pedig PWM-el (Kobold kolléga szépen elmagyarázta a PWM lényegét). A motor tipusától függően kell kiválaszd a motor tápfeszét, valamint a teljesitménytől függően a meghajtó tranyó tipusát. Csak szólok, hogy a filmen látható effektek, Manuális módban készültek. PIC-es verziónál az effektek váltakozása jóval gyorsabb és mint a rajzból is kiderűl, csak a fordulatszám változik automatikusan, a motor polaritása NEM. Az áramkört már nagyon rég készitettem, ma már egy kicsit máshogy épiteném meg, de az áramkör természetesen igy is működőképes. A 4 tranyó helyett, ami a H hidhoz kell, használhatsz TC4424-es MOSFET meghajtót. Előnye, 3A-ig valamint 18V-ig birja a strapát és hibás vezérlés esetén nem tudod kipurcantani mint a szimpla H hidas verziót (az oldalon található fordulatszám mérő is ezzel műkszik). Üdv mindenkinek!
A 15 amperes határáramú tranyóra nem kellene 12 ampert engedni, mert ott a bétája már 10 körül is lehet(
) és 1,x amperes bázisáram kell neki, azonkívül az \"Uce\" fesz kb. 1,3-1,5 volt lesz. Tehát vagy 25 amperes tranyó kell, vagy 1 pár és akkor asszimetria esetén is jobb a helyzet.A diódákkal nem szabad játszani; leveszem, vissza rakom... kellenek! Minimum a max áram felére tervezve, de nem a katalógus adat szerint ( határérték...), hanem amit ki is bír üzemi hőfokon, esetleg hűtve azt is. 100 voltos schottky előnyben. Visszatérve a kapcsolásodra: ebben a szituban már tényleg nincs értelme darlingtonnal játszani, mert akkor már a meghajtón is elveszik 1 volt és összességében már 2,5 x 2 volt, ami esik; ez 5 volt és máris messze vagy a tápfesztől. Amiket proba leírt, mit vizsgálj, mérj lépésenként, gondolom, nem tetted meg, mert akkor nem lenne ennyi kérdésed. Egy kapcsolást , ill. a kivitelezését aprólékosan, lépésenként kell felépíteni, főleg ilyen esetekben. Ha nem kell irányváltás, akkor jobb lesz a sima pwm hajtotta fetes szimpla végfok és töredék lesz a veszteség. Irányváltás esetén meg még mindig olcsóbb és egyszerűbb egy nagy pogácsás négyáramkörös, kétmorzés 24 voltos relével váltani, a PIC úgyis elrendezi, hogy ne áram alatt váltson ( program !), tehát a beégés veszélye kicsi. Végül: itt jön elő megint, hogy egy bizonyos kapcsolási forma csak szűk körben használható jól... jelen esetben 1-2 amper és 24 voltos motorhoz már 30 volt táp kellene.
Udv,
talaltam egy fet-mehgajto IC-t a HIP4082-t es a fiok melyen 8 db 12A-es 60V-os n-csat. Fet-et ami kifejezetten motorvezerlesre es PWM-re lett tervezve. Ezek MTD3055VL tipusuak. Talaltam neten egy kacsplasi rajzot, amiben osszehozzak a H-hidat. Vetnetek ra egy pillantast, hogy erdemes-e megepiteni? Ugyan az ember megcsinalta es allitolag mukodik, de buktam mar be ilyenen. A kerdeseidre valaszolva, kell az iranyvaltas, a rele kizart mert pwm vezerelt lesz.
Legalább 2 db fetet köss párhuzamba. Az eredeti 1 db 530-as gyenge ide, de ezt csak az esetleges utánépítőknek...
Az IC-t nem ismerem, úgyhogy nem tudok véleményt mondani. Mindenesetre a pwm és az irányváltás két különböző dolog - a tisztán pwm-es hajtás akkor muszáj, ha menet közben, folyamatosan váltod az irányt is és szabályozod a motorfeszt is. Ekkor van/lehet a dinamikus blokkolás/fékezés is. Ebben az esetben a híd ad (+)-t, majd (-)-t a motornak, egyforma kitöltéssel. Nem hinném, hogy egy fűnyírónak ilyen kell... 
pontosan errol van szo, amit irsz. A taviranyito vevojenek a kimenetere egy pic van kotve, ami osszekeveri a sebesseg es irany jelet, ebbol pwm jelet general. A hid bemenete pwm jelet kell tudjon fogadni. A sebesseg es irany szabalyozasa fontos es szukseges.
Ezek szerint tudsz mindent...
Amiről én beszéltem, az olyan hajtás, amikor nagyságrendileg tizedmásodpercenként változik az irány és a sebesség. Kétlem, hogy te ezt távirányítóval tudod produkálni.
iranyvaltas tizedmasodpercenkent? akkor alaposan felreertettelek. a pwm a sebessegallitashoz kell, a pontos szabalyozashoz. a gyors iranyvaltast a motor tehetetlensege miatt fizikailag is lehetetlen lenne megvalositani, es szukseg sincs ra, ahogy irtad.
Az adatlapon is valami hasonló kapcsolás van, én csak az ügyben vagyok bizonytalan hogy a fetekkel párhuzamos diódák mennyiben egészítik /növelik meg az ic terhellhetőségét,illetve mit jelent az ic 1.25 A peak katalógus adata.Szerintem nézz szét (van még néhány PWM -es fórum) mielőtt így bekötnéd,ill tudd meg hoy az illető milyen motorra használta ezt a kapcsolást. Majdnem mondtam hogy tenyleg jó a jelfogós irányváltás szerintem is,DE mennyire akarod hogy egyenesen menjen a fűnyíró ,folyamatosan akarod korrigálni az irányt, vagy megy amerre megy a sáv végén fordul?
Ha az egyenesen menés fontos akkor pont a kritikus tartományba esik a jelfogó működése ,ami nem biztos hogy előnyös. Lehet először próbálkoznék vele (egyszerűbb jóval megépíteni) és ha nem tetszik akkor gondolkodnék a H hídon.
Nos, hát ez az... azért értettél félre, mert kevered a dolgokat. Jó, ha tudod, hogy vannak ilyen hajtások is, nem is kevés. A szemed sem tudná követni a mechanika mozgását.
Proba: arról meg végképp nem volt szó, hogy kétmotoros a cucc; előre, hátra, + jobbra és balra is. Mindegy - az előre-hátra irány fűnyíró esetben nem kíván okvetlen hidat. Persze, ha csak kanyarodni kell, nem szóltam...
szervo elkerulesevel, hogy tudok vezerelni 4 tranzisztort, ami vezerel 4 relet? ekkor nincs sebesseg allitas, de tudom iranyitani. Pillanatnyilag 2 kapcsolo segitsegevel hasznalom, ami kenyelmetlen. A konstrukcio: ket hajtott kerek, 2 kulon motorrol amik az iranyitast is vegzik.
|
Bejelentkezés
Hirdetés |