Fórum témák
» Több friss téma |
Feltöltött az elem
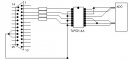
 Megmértem GND re zár az adó gombja.(ha a tápot meg a kapcsolót mérem ellenállással akkor 0,00 Ohm et muta) TLP521-4A opto csatólóval meg is tudnám oldani az egészet. Csak bajba vagyok  nem tudom mekkora az elennálása a ledeknek a optocsatolóban és így enm tudm kiszámolni mekkora kell eléjük nem tudom mekkora az elennálása a ledeknek a optocsatolóban és így enm tudm kiszámolni mekkora kell eléjükDe azon vagyok ogy megtaláljam és akkor minden oké
Akkor ezek a végleges kapcsolások
Remélem nem csak én építem meg! Aki kedvet kap rá annak jó munkát kívánok! Ha megépült videót és keépet is rakok fel! Köszi. Mindenkinek!
Vá most jut eszembe!
Az TLP521-4A ha jól értelmeztema leírását akkor 50mA képes kapcsolni. Az adó ennel lehetséges hogy nagyobb áramot kapcsol?
Biztos hogy nem ! Talán mikróamperek lehetnek
én valami ilyen nyákot csinálnék
Sziasztok!
Megjött a csomag tegnap. Most maratom a II panelt. Addig felrakom az "Egyszerű robotot" amit unalmamba alkottam
Üdv.!
Bocsánat az építés kicsit elhúzódott  Ennek oka hogy kicsavartam az ptpcsatoló eggyik lábát . Mivel a postakölcség 10*rese az alkatrész árának ezért nem igazán akaródzott megvenni.Végül személyesen vettem a boltba.(Pontosabban anyukám mert ő járt arra) Nos kész a robot bennevan az opto csati és nem megy Ha optacsatoló "ledjeinek" hejére normál 5mm es ledet rakok akkor az világít. Ebből gondolom hogy az optocsatinak is kéne. Azt nem tudom hogy a TLP521-4 nek a tranzisztorai npn vagy pnp-k? Vagy mindeggy ennél a fajtánál?
Pár kép a robotról
Szia Viktor.Hogy mennek a hajók ? Lassan befagynak a tavak , én is egyre ritkábban repülök.
 Figyelemmel kisérem a robotos oldalt , de arra ragadtam tasztatúrát , hogy neked is vannak abból a jóóó "Blue baby "akksikból.Én intelli control 3 töltővel leteszteltem -- hát siralmas. Figyelemmel kisérem a robotos oldalt , de arra ragadtam tasztatúrát , hogy neked is vannak abból a jóóó "Blue baby "akksikból.Én intelli control 3 töltővel leteszteltem -- hát siralmas.
Üdv.!
Bocsi az off ért Én most 1 3,5 ös frs-rel próbálkozok de kifúj a hengerfej tavasz elött megjavittatomm oddig pihen. Nekem nins ilyen aksim. Én 2800 mA os ceruza akukat szoktam házilag fóliázni.
Nos készen van
Holnap ha lessz fény csinálok képeket. De megint van 1 kis gond a mororok nem bírják átfordítani a kerekeket most alakíthatom át az egészet, hogy beférjen 1 dörzskerék  De egyszer majd csak működni fog. (ha kerekbe ragasztok 1 tengelyt ezt hogyan lehet a legkönyebben rögzíteni hogy szabadon futó legyen?)
Üdv.
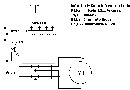
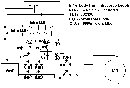
Végülis a saját gyártmányú robotnak nem volt elég nyomatéka, hogy megmotdítsa a robotot :smoke: . De nem adtam fel itt elmentem a kínaiba és beszereztem 1 táviránytóskcsit. Gyorsan szétkaptam csak alváz maradt. A távirányítóját összeépítettem a lpt portal, és megy!! :eplus2: Végülis az az eggyik bajom, a programja miatt néhe elszabadul 1-2 másodpercre, és néha én is figyelmetlen vagyok = belevezetem ebbe abba  Kitaláltam 1 olyan kapcsolást ami ezt elkerülhetővé teszi(csatolva) Egy rövid beszélgetés után kiderült, hogy mint mindent ezt is kicsit túlbonyolítottam  . .Ezután megszületett a végső kapcsolás(csatolva). + még a progi is
Most nézem, hogy az első programot csatoltam íme az ami épp msot fut. Esetleg valaki + tudná mondani hogyan kéne azt megcsinálni. Hogycsak akkor írja ki merre megy amikor változás van, ne ismételgesse magát csak ha iránytvált.
Hali!
Hol ismételgeti magát? Szerintem tökéletesen működik a szoftver e téren.
Üdv.
Az volt a bajhom(ami csupán vizuális) h egymás alá irogatja ki éppen mit csinál és ismételgette. De már megoldottam 1 kevésbé elegáns módszerrel :smoke:
Igen
De most próbálom delphib, csak nem értek hozzá csak pascalt tanultam A másik, egy rádiós webcamhatótávát miképpen lehet növelni?
Üdv!
Gondolkodtam picit és arra jutottam, hogy egy opto tranyón keresztől lehet nem kéne 1 relét húzogatni. Kicsit kiegészítettem a kapcsolást és számolgattam. Valaki le ellenőrizné? Köszönöm. 
helló!
Én egy olyan robotot Idézet: építeni aminek két lába van és járni tud(valami olyat mint a terminátorok).„szeretnék” hogy lehetne ezt elkészíteni ??? hogy egyensúlyozna ??? segítene valaki? 
Itt van egy link.Ez egy két lábas robot,a céljaidnak tökéletes.Servo motor mozgatja a lábait,a servo motorokat egy mikrokontrolleres vezérlő irányítja.Ott van a kapcsolási rajz meg a picbe égetendő program is.Csak lekell töltsd.Az egyensúly nagyon stabil,a láb felépítésének és a programnak köszönhetően.A mikrokontrollerbe égetendő program nagyon finoman vezérli a servókat.Ezért stabil mozgású és stabil egyensúlyú robot.Itt van a link.

Szisztok.
Nincs valakinek AVR robot vezérlés dióda híd és infra szenzor. Bascomba megírva? Köszi
hello 2 haverommal és én csinálni akarunk egy robotot de még csak a feje van kész és 9évesek vagyunk
és nem birjuk a proceszort be programozni  meg még a lábatse tudjuk hogyan csináljunk meg még a lábatse tudjuk hogyan csináljunk  meg azt sem tudjuk hogyan kell a robotot ön tudatára ébreszteni :no: és aztis gondolom hogy hülyék vagyunk hogy 4-edikesek vagyunk és robotot akarunk épiteni meg azt sem tudjuk hogyan kell a robotot ön tudatára ébreszteni :no: és aztis gondolom hogy hülyék vagyunk hogy 4-edikesek vagyunk és robotot akarunk épiteni 
nekem van de a robotom ba van már benne ugy ho nem tudom oda adni bocsika

kössz h elkülted a éinket és bocs h felteszek egy hülye kérdést:milyen akatrészek szügségesek hozzá?
  :yes: :yes:  :violent: :violent:
Sziasztok!
Nem lehet elég korán kezdeni. Szerintem ez még elég nehéz lenne számotokra, de nem az én feladatom, hogy megitéljelek benneteket. Ha körülnéztek a Conrad-nál találtok egy kétkerekű robotot. Ezt megvehetitek összeszerelve és kitben is. Ezt lehet programozni, meg miegymás. Szerintem alapnak a legjobb. Sokat lehet tanulni belőle. Szerintem én is megfogom venni. És ha már azt jól tudjátok programozni akkor tovább léphettek.
Sziasztok
Anyukámnak kéne csinálnom egy robotszerűséget,ami felsepri a konyhát.Ezzel zaklat mióta látta a tévébe.Annyit mondott hogy meg tudom neki csinálni.Én máshogy gondolom de hajthatatlan.Hívogat telefonon hogy hol tartok.A felépítéssel nincs gondom csak az elektronikába kéne kis segítség. Tudna valaki valami hihetetlen egyszerű technikát?Szék láb kikerülés fal,konyhaszekrény.Ennyi.Semmi logika meg komoly dolog. Köszönöm előre is |
Bejelentkezés
Hirdetés |