Fórum témák
» Több friss téma |
Fórum » Robotika kezdőknek
Na lassan elkészül 2 további tanulórobotom. Egyik egy LDR-es fenykövető robot, a másik meg egy Sharp infravörös távolsgérzékelőt használó robot (RoboMoly és WILL-I V2.0). Hamarosan az építésről szóló a cikk is kész lesz.
Egy kép RoboMoly-ról:
Próbűltam DivX videot is csatolni, de nem megy.
A cikkben láthatjuk a videót.
Tisztára a Rövidzárlat jutott eszembe róla, ahogy az 5-ös robot mozgott.  Esetleg a szenzor finomabb pásztázásával finomabb irányításra is rá lehetne bírni. Végül feltérképezhetné a szobát, és sört hozhatna a konyhából.  Tetszett.
Nem pontosan értem az elképzelést, de ha mégis jól okoskodom, akkor te elkezded növelni a LED fényerejét, és a visszaverődés távolságától függően egyszer csak a TSOP elkezdi érzékelni a visszavert jelet?
Ha ez az elképzelés, akkor el kell szomorítsalak. Nem fog működni. 1. Azt, hogy hogyan (milyen kimeneti jelszinttel) fogja egy IR vevő érzékelni a visszavert jelet, sok mindentől függ még a távolságon kívül. Felület nagysága, felület anyagminősége, (pl fekete textil, vagy fényes alulemez), egyéb fénysugárzások, az adó milyen térszögben sugároz, ... 2. A TSOP-t távirányítók jelének vételére használják, van benne AGC ami próbálja a bemenő jelet adott szintre erősíteni. Ráadásul ha csak egy sima impulzus sorozatot vesz, szerintem nem lesz semmi a kimenetén, mert a modulált bemeneti jelet "burkológörbé"-hez hasonló módon demodulálja. Ha félreértettelek, akkor bocs.
Most nagyon elszomorítottál
 Pedig az volt a célom hogy WILL-I WALL-E-ra hasonlítson. Térképezésre inkább a nagyobb érzékelési tartományú szenzorok a jók. A 10-80cm-es hatótávja esetleg túl kicsi , de a 20-150cm-es vagy a 100-550cm-es (ilyen is van!) szenzorokat már elég jól lehet erre használni. Az alábbi weboldal legalján van példa térképező algoritmusra is és gyakorlati megvalósításra is.Bővebben: Link A sörre visszatérve, szerintem már egyenesen a boltból kellene hoznia! 
Én gyerekkoromban a Rövidzárlatot láttam , a mai fiatalok meg a WALL-E-ért rajonganak. Az 5-ös robot akkor is valódi, Wall-E meg egy renderelt izé.
 A csatolt link szép és jó, de mi jobban szeretjük magyarul, részletes magyarázatokkal. Különben a HE nem lenne több (kis túlzással), mint egy nagy elektronikai linkgyűjtemény. :yes:
Szia
Bocsáss meg, hogy beleszólok, de nem biztos, hogy jó lenne, ha mindent leforgatnának a kollégák. Nem is szabad elvárni senkitől, sőt meg kell köszönni, ha valaki megossza velünk (kezdőkkel) a tudását. Én például elég gyenge vagyok angolból, na de a Googl translator az nem. Azt használom több kevesebb sikerrel. Igaz vannak nehéz perceim néha, de tanulok vele. Neked ís ajánlom ezt az eszközt, hidd el nagyon jó szolgálatot tesz.
Sziasztok!
Arra lennék kíváncsi, hogy szerintetek mi a legmegfelelőbb egy robot vezetéknélküli számítógépről történő vezérlésére? Én bluetoothra gondoltam, mert a 10m-es hatótáv elég és akár mobiltelefonnal is lehet vezérelni. Várom véleményeiteket.
Ezt ládtátok már én nem értek a robotikához de ez a kutyaszerűségű robot figyelemre méltó.
 Bővebben: Link Bővebben: Link
Hogy kezdjek hozzá a tanulásnak pl. milyen programnyelvet ajánlotok (már hallottam az assembly-ről) megy valami leírást is linkelhetnétek
Félreértettél.
Nyilván nem azt szeretném, hogy a szerző kezdje el nekünk lefordítani a külföldi cikkeket. Csupán egy lehetséges fejlesztési irányt próbáltam meg bedobni. Ismerjük el, szívesebben olvasnánk egy magyar szerző tollából magyar fejlesztésről, még ha az ötlet külföldről jön is, mint egy angol oldalt bogarásznánk, amely inkább videókkal van tele, mint értelmes, a megoldásra rávilágító működési leírásról. (most nem a korábban ajánlott linkre utaltam, csak általánosságban írtam)
Első körben döntsd el milyen robotot szeretnél, utána keress egy programnyelvet amit mind gépen mind pic ben használhatsz ( c vagy basic pld). Ezután jöhetnek az elektronikai nagyon alapok, és amiről megszoktak feledkezni sok sok matek. Ajánlom a neten kóborló szájbarágós szakdolgozatokat és jegyzeteket. Konkrét elképzelés nélkül nehéz elindulni, bár mindig jobb ha szerteágazó tudást szerzel....
Hello!
Vettem egy BTM-112 bluetooth modult. Vezetékes kapcsolatot, már sikerült összehozni egy Attiny2313 mc-vel, de most szeretném ugyan ezt bluetoothon keresztül. Az adatlapon azt olvasom, hogy 3.3V kell neki. Szerintetek ha mégis 5V-ra kapcsolom, akkor ártok vele? Van valakinek egyéb tapasztalata bluetooth modulokkal? Lesz még kérdésem...
Szerintem nem kellene erőltetni az 5 voltot, vagy lehetetlen betenni egy 2,2k és 3,3k értékű osztót?
Vagy ha tápra érted akkor egy 3,3 -as stabkocka. Idézet: „Az adatlapon azt olvasom, hogy 3.3V kell neki. Szerintetek ha mégis 5V-ra kapcsolom, akkor ártok vele?” Ha egy süteménybe liszt kell, akkor mit ártok vele ha helyette földet teszek bele?! Nem díszítésnek van ott a 3,3V. 5V-ról 1mp alatt kinyírod.
Sziasztok!
Nézegettem ZigBee modulokat és érdekelne, hogy szerintetek vezérlésre és állapotvisszajelzésre jobb-e a bluetooth-nál? Számítógépről lenne irányítva a robot.
Sziasztok!
Tudna nekem segíteni abban hogy "C" nyelven hogyan kell egy szervót mozdulásra bírni? PIC 16F84A PIC-et használnék kezdetben, ezzel 8 servot tudnék vezérelni de sajnos a programozásban gyenge vagyok. Nézegettem Neten oktató filmeket de hát servo vezérlést kevesen oktatnak videóban. A kérésem az lenne hogy C nyelven le tudná írni valaki hogy a középpontból hogyan milyen módon (parancsokkal) tudom kimozdítani a servót. Az elméletével tisztában vagyok csak a megvalósításra még nem láttam sehol példát. Egy példa kéne amin elindulhatnék. Előre is köszönöm a segítséget. Üdv.: Kenikol
Itt van 2 program, működnek. (CCSC fordítóhoz írtam)
Az egyik simán középen tartja a szervót, a gombok lenyomására pedig egyik vagy másik végállásba vezérli; ha a gombot felengeded, középre visszaáll. A potis verzióban oda fordul a szervó, ahová a potit (10k) tekerted. Annyi az egész, hogy a kiadott impulzushossz számára egy bizonyos pozíciót jelent. Ja, és az csak elvben létezik, hogy 1ms=egyik végállás, 1,5ms=közép, 2ms=másik végállás. Játszani kell kicsit azzal, hogy pont annál a szervónál pont mennyi kell neki. Gondolom drágábbaknál azért pontosabb; én egy towerpro SG-90-el játszogattam.
Hali!
Nagyon köszönöm a segítséget, esetleg egy olyant még kérhetnék, teljesen hardveres beavatkozás nélkül, csak a program segítségével középállásból elfordítsa a servot egyik végállásba? Aztán mondjuk( de ezt lehet már én is megtudom írni) egy következő paranccsal visszafordítani a középső állásba. Nagyon köszönöm a segítséget! Kenikol
Kipróbáltam, működik:
2mp középen, 2mp egyik oldal, 2mp közép, 2mp másik oldal stb. Ha csak egyik oldal és közép kell, akkor simán kidobod azokat a sorokat amik nem kívánt pozícióba viszik. d=2 jelenti a 2mp "várakozást" az egyes pozíciókban.
Hali!
nagyon köszönöm a segítséget, neked milyen meghajtó áramköröd van? Üdv.: Kenikol
Hát semmi különös, 4MHz kvarc, 22pF kerámiakondikkal, PIC16F877A, és 7805 adja az 5V-t. A motor táplábai simán tápon, a vezérlő láb pedig egyenesen a pic lábára megy. Én csak próbanyákon dugdostam össze.
Több szervó mozgatását egyébként már megszakításokkal kéne csinálni, ha azt akarod, hogy egyszerre mozogjanak. Az komolyabb dolog, úgyhogy abban nem tudok segíteni
Már így is rengeteget segítettél, nagyon köszönöm remélhetőleg a többivel elboldogulok. Majd beszámolok a fejleményekről, ha lesznek.
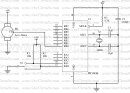
Én most az alábbit tervezem megépíteni. A kapcsolót nem rakom bele, egyszerűen a pic tápjának megszakításával vezérlem majd.
Persze, lesz neki a 3.3V, csak türelmetlen vagyok
dugaszolós próbapanelon raktam össze, 5V-ot kapott és működött, igaz csak kb 1m távolságból, mert nincs antenna!Mostmár megnyugodtam... csinálok neki egy panelt antennával. Mekkora antenna kell neki? Hogy kell bekötni? Van egy RF láb, gondolom ide kell az antenna, mellette van két föld, ezt simán rákötöm az antennára?
Sziasztok, nagyon jó a willi robot! Szerintetek meg lehet oldani 16f628-al ???

Miért ne lehetne pic el megoldani? Bár a 628 as szerintem egy ccp kimenettel büszkélkedik (szoftveresen viszont semmi nem lehetetlen)
Amikor én építettem fénykövetőt érintőkapcsolókkal, egy pic16f887-ből építkeztem.
Azért a 628 3,5k memóriája a 887 14k memóriájától kicsit lemarad...
Valami egyszerű ütközésre elfordulós program befér ebbe is. Ha nekilátsz, szerintem ne azzal a piccel kezdj hozzá, mert gyorsan elfogynak a lehetőségek. Pl ha jól tudom, nincs benne ADC, így a mindenki kedvence fénykövetés funkcióra nehéz lesz rávenni (legfeljebb hardveresen megoldod, de nem lenne túl elegáns) Konkrétan a 887 szerintem jó lesz kezdeni, nem is drága, és abban megtalálsz mindent. Ha mindenképp 628, akkor megoldható azzal is, de az csak menni meg akadály előtt elfordulni fog sebességszabályzás nélkül. (esetleg ackermann hajtás, és akkor szabályozhatsz sebességet, de ahhoz meg a kód lesz túl sok mire egy Y megfordulást leírsz...)
Köszönöm a gyors választ azt hiszem megpróbálom 16f887-el..
|
Bejelentkezés
Hirdetés |