Fórum témák
» Több friss téma |
Fórum » Robotika kezdőknek
Az gyanus, hogy az x es y min max ertekek nem nagyon ternek el egymastol (korabban, ha jol emlekszem kb 100-150 volt a kulonbseg a min es max ertekek kozott, most meg kb 50, az y-nal meg csak 4, ez biztosan hibas).
XX es YY is nulla, mert rossz modszerrel szamolod ki oket. Ezek 0 es 1 kozotti ertekek, amiket nem nagyon tudsz az AVR-rel kezelni (legalabbis en nem tudom hogyan kellene). At kell skalazni. Melo utan, otthonrol majd kuldok reszletesebb magyarazatot...
Szia Fizikus! Én már rájöttem, hogy mi miatt csökkent le a skála (min. max. közötti különbség). Rendet raktam és a fogók és egyéb nagyobb fém tárgyak elkerültek a közeléből ... Mint a kép alján is látod, amikor visszatettem a vasakat, akkor megint megnőtt nagyon a skála. Majd a tokozásba teszek egy fogót
 Azt tudom, hogy xx és yy 1 és -1 közé kell, hogy essen ezért osztom el a skálával... mindegy, te előbb értetted, mit és hogyan kell, nem magyarázom. De pont ez az ezerszeresét iratom ki az xx ill. yy értékeknek, de magát az xx és yy értéket nem szorozhatom fel, mert a arkusztangens függvény miatt kell, hogy 1 és -1 közé essen. Próbáltam már float-ban és double-ban is tárolni/kezelni a xx, yy értékeket, de akkor is 0-át ad vissza. Már próbáltam szétbontani, hogy hátha csak a sok műveletet nem tudja kezelni egyben, Azt tudom, hogy xx és yy 1 és -1 közé kell, hogy essen ezért osztom el a skálával... mindegy, te előbb értetted, mit és hogyan kell, nem magyarázom. De pont ez az ezerszeresét iratom ki az xx ill. yy értékeknek, de magát az xx és yy értéket nem szorozhatom fel, mert a arkusztangens függvény miatt kell, hogy 1 és -1 közé essen. Próbáltam már float-ban és double-ban is tárolni/kezelni a xx, yy értékeket, de akkor is 0-át ad vissza. Már próbáltam szétbontani, hogy hátha csak a sok műveletet nem tudja kezelni egyben,
Szia!
En nem igy szamolnam ki xx-et es yy-t:
felesleges leosztani a vegen a ketszeres sensityvity ertekkel, mert az atan fuggvenybe ugyis yy/xx hanyados kerul. En inkabb a nyers ertekekkel szamolnek:
Ezekbol szamolnam ki az aranyt, amit mar be lehet tenni az atan2() fuggvenybe.
(most neztem csak, hogy a math.h tartalmazza az atan2() fuggvenyt is, igy nem kell vacakolni az elojelvizsgalattal) En eloszor ujra kiiratnam a nyers meresi eredmenyeket a hi es lo bajtok erteket is, a max es a min ertekeket. Ezeket abrazolnam az Excel-ben hogy jok-e. Utana mennek tovabb az analizacioval.
A képleteket a dokumentációból szedtem.
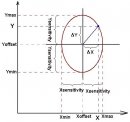
AN-00MM-003_Magnetic_Sensor_Calibration_r1_1.pdf 2.4 Parameter Calculation Mx_Sensitivity=(Mx_max-Mx_min)/2 //xsensitivity My_Sensitivity=(My_max-My_min)/2 //ysensitivity Mx_Offset=(Mx_max+Mx_min)/2 //xoffset My_Offset=(My_max+My_min)/2 //yoffset AN-00MM-004_Electronic_Tilt_Compensation_r1_1.pdf Geomagnetism decomposer Azimuth=arctan(y/x) Azimuth=90 (x=0, y<0) Azimuth=270 (x=0, y>0) Azimuth=180-[arctan(y/x)] * 180/Π (x<0) Azimuth=-[arctan(y/x)] * 180/Π (x>0, y<0) Azimuth=360-[arctan(y/x)] * 180/Π (x>0, y>0) És ahhoz, hogy azt arkusztangens függvényt tudjam alkalmazni, ezért úgy akartam 1 és -1 közé tenni xx és yy értéket, hogy az általad említett képletet megalkottam. A te általad készített képlet csak beteszi az origóba a kőrt, de a kör sugara esetenként akár 140 is lehet, de az arkusztangens függvény csak 1 és -1 között írható fel, ezért osztottam le a sensitivity kétszeresével, hogy a maximum sugara a körnek 1, a minimumja pedig -1 lehessen.
Ha normalizalni akarod, akkor meg csak a sensitivity ertekkel kell elosztanod, nem pedig a ketszeresevel...
Szerintem az arkusz tangens ertekkeszlete esik +/- PI/2 koze, az ertelmezesi tartomanyna +/- vegtelen. Szerintem probaldd ki az atan2() fuggvenyt.
Hello Fizikus!
Most olvastam a gyorsulásmérős cikkedet, és kedvet kaptam kipróbálni. Hol lehet ilyet venni magyarországon, és mennyibe kerül körülbelül? Köszi a választ!
Helló!
Már régebben olvastam Fizikus újabb hasznos cikkjét, de csak mostanában merült fel bennem egy felhasználás. Biztos mindenki ismeri a Segway nevű szerkezetet. Jó kis cucc, az tény, de ~ 2 300 000Ft az alapmodell. Az lenne a kérdésem, AVR -rel és gyorsulásmérő(k)vel meg lehetne -e valósítani egy Segway utánzat vezérlését. 
Az biztos, hogy lehet -teli van vele a youtube. Én is egy ilyesmit fejlesztek most kicsiben, de még nem tud megállni. Kérdéses, hogy a jelenlegi motorjaival képes lesz-e rá valaha...
Kedves Fizikus! Nem mondom, hogy tökéletes ... sőőőt! De már azért megy ... Igaz, hogy szerinte nem arra van Észak, mint a hagyományos mágneses iránytű szerint és 180°-kal "fordítva" ír ki (a 90°-270° tengelyben kell tükrözni), de ezt szoftverben korrigálom majd. A 0° körül valami dug van, mert 18° és 318° között mínusz értékeket ad
Nézd meg a képet! (nem túl mesteri  ) Na hogy tetszik (a haladás)? ) Na hogy tetszik (a haladás)?
Alakul a dolog!
Szerintem ennel nagyobb pontossagot nem nagyon lehet elerni, mert ez a modul nem kompenzalja az erzekelo dolesebol eredo hibat. A vizszintes dolesbol eredo hibakat is kompenzalo szenzor viszont legalabb 5-10-szer annyiba kerul mint ezek a modulok.
Hát igazából én már annak örülök, hogy a 90° és a 270° egybe vág és a 180° merőleges rájuk! Mondjuk ennyit még nem sz°ptam semmivel, mint ezzel és még ugye készen sincs. Amit nem értek, hogy néha ha sok vas van a közelében (fogók, csavarhúzók), akkor sokkal nagyobb a sensitivity és sokkal több értéket ad a 360°on, nem csak 16-ot, de nem mindig ... Na majd csiszolok még rajta és ha kész, küldöm a kódot ... ha még mindig kell... Te hogy állsz a cikkel? Amúgy mennyi ideig szokták lektorálni?
A cikkem kb 95%-ban kesz, de mindenkeppen megvarom amig elkeszulsz a projecteddel.
A lektoralas ideje valtozo, volt hogy 1 nap alatt publikussa lett teve, de olyan is volt hogy a hibajavitasok es a lektorok keves szabadideje miatt elhuzodott 1 honapig is. De altalaban gyorsak szoktak lenni. U.i.: elkuldtem mailen a felkesz cikket
Az biztos, hogy az erzekelot elegge maceras kalibralni.
Vastargyak kozeleben azert valtozik az erzekenyseg, mert a vastargyak "magukhoz huzzak" a magneses tererovaonalakat (torzitjak a Fold magneses teret). A magneses aknakeraesok, magneses aknagyujtok es tengeralattjaro kereso detektorok is ezen az elven mukodnek.
Sziasztok ezt a szervót lehet vajon végteleníteni? Bővebben: Link
(Magyarul, hogy többször is körbe tudjon fordulni.) 
Én úgy tudom minden szervót lehet, de ha veszel, akkor már miért nem veszel inkább körbeforgót ? Azt nem kell szétgányolni.
Linkelnél nekem valami hasonlót! Mert nem is tudtam hogy ilyen is létezik.
Na végre kész! Elég üzembiztos és egész jól működik. Holnap teszek fel délelőtt képeket, meg csinálok videót és annak a linkjét. Kipucolom a kódot és küldöm azt is, meg összedobok egy kapcsolást, hogy mit kötöttem hova.

Szuper!
Gratulalok!  Egy nehany szavas ismertetot is fuzz hozza (mert akkor nem nekem kell megirni...) es berakom a keszulo cikkem mellekletebe. Mi legyen a kovetkezo kozos projectunk?
Köszönöm szépen!
 A videó ezen a linken érhető el. Kép mellékelve. Nem is tudom, hogy milyen közös projekt legyen a következő. Ötlet? Nekem most megy pár párhuzamosan ( jármű menetíró készülék, időjárás megfigyelő állomás, ... ). A videó ezen a linken érhető el. Kép mellékelve. Nem is tudom, hogy milyen közös projekt legyen a következő. Ötlet? Nekem most megy pár párhuzamosan ( jármű menetíró készülék, időjárás megfigyelő állomás, ... ).
Thx! Igazából Fizikus segített a legtöbbet, de ti is sokat segítettetek itt és az AVR miértek, hogyanok-ban. Köszönöm!
Heló!
Az egyik ismerősömnek volt lehetősége szórakozgatni a pingvin robot programozásával. A roboton található iránytűmodul, elmondása szerint nagyon érzékeny. Az iránymeghatározást már a robot közelében lévő árammal átjárt vezeték is megváltoztatta. Sőt ami a legjobb, a pingvin hátán gyárilag elhelyezett elemtartó helyét meg kellett változtatnia, mert az elem vas palástja behülyítette a modult. Rengeteget szívott vele mire rájött a hiba okára. Egyébként a csipben mi van? Hogy néz ki belülről, mi alapján érzékel?
Két egymásra merőleges tekercs van benne és a két tekercsel mért mágnesesség értékekből lehet kiszámolni a mágneses erővonalak irányát. Természetesen ez nagyon zavarérzékeny és minden mágnesesség, vagy bármi ami megzavarja a fluxust (lágy- és kemény vas, áram járta vezető, mágnes). De ennél bővebben majd Fizikus (remélhetőleg) nemsoká megjelenő cikkében.
Sziasztok!
Az alábbi gyorsulásmérőt Budapesten hol tudom beszerezni? MMA7260QT
Szerintem sajnos sehol. De ha sikerul, irjad meg ide is, mert sokakat erdekelne...
hi én még naon az elején vagyok szinte semmit nem .
valaki tudna segíteni egy robot megalkotásában vagy ha azt gondoljátok hogy még ez túl nagy hal akkor hol kezdjem ? előre is köcce  Email Email
Üdv! Először el kellene döntened milyen feladatokat akarsz elvégezni a robotoddal. Ha ez megvan akkor ismerkedj meg a mikrovezérlőkkel.Az oldalon sok jó cikk van róluk(kifejezetten ajánlom Fizikus cikkeit) vagy ha megelégszel egy olyan robottal ami csak "bután teszi a dolgát" akkor ajánlom figyelmedbe a logikai kapukat, mivel ezzekkel is sok jó dolgot ki lehet pakolni.Nézz utána a motorvezérléseknek.Először is azt ajánlom , hogy egyszerű dc motorokkal próbálkozz,építs hozzá H-hidat kisérletezz miként tudod vezérelni őket.Ha komolyan gondolod a robotépítést akkor biztos sokan fognak segíteni neked.Kérdéseid legyenek átgondoltak és jól értelmezhatőek.
Kezdesnek mindenkeppen egy Arduino panel hasznalata tunik a legegyszerubbnek, mert viszonylag egyszeru programozni, USB-n keresztul kozvetlenul letoltheto ra a megirt program (nem kell kulon AVR programozot venni/epiteni).
Ehhez mar csak nehany ellenallas meg LED kell es el lehet kezdeni jatszani/tanulni. |
Bejelentkezés
Hirdetés |