Fórum témák
» Több friss téma |
Cikkek » PIC-es motorvezérlés PIC-es motorvezérlés
Szerző: Ideiglenes, idő: Jan 19, 2011, Olvasva: 46492, Oldal olvasási idő: kb. 3 perc
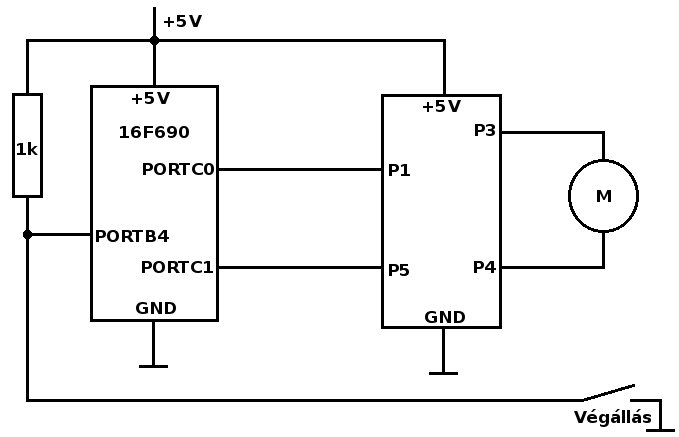
A PICkit demo panelja elég nagy lehetőségeket ad a vezetékek kötözgetéséhez. Én úgy döntöttem, hogy az illesztőpanel vezérlőpontjait a pic "C" PORT 0 illetve 1 lábaira kötöm, a végállás kapcsolót pedig az "B" PORT 4-es lábra és a GND-re, nem elfeljetve az 1 k ohm -os felhúzó ellenállást, ami szintén a "B" PORT 4-es lábához kapcsolódik, valamint az +5V-ra. A rendszer megtáplálásáról a PICkit2 gondoskodik.
A kimenetek állapotáról a demo panelen található LED-ek adnak majd némi infomációt illetve a végállás kapcsoló jelzése is ide lett másolva a 4. LED-re. A vezérlőprogram se lett agyonbonyolítva, de azért a megoldás megérdemel némi magyarázatot. Először is fontos tudni, hogy a program C nyelven íródott és az ingyenes SDCC fordítóprogram legújabb változatához lett igazítva. Nem kell hozzá nagy nagy munka szerintem, hogy másik fordító is megeméssze a sorokat. A C ezért egy szerencsés választás. Könnyen megeshet, hogy egy másik tipusú vezérlőre íródott program néhány apró változtatással áttehető PIC-re is, vagy fordítva.
Jobban szeretem a kódban kiírni, hogy mikor melyik portra történik az írás, vagy éppen melyikről olvas be értéket a program, ezért szerepel a program elején a NO_BIT_DEFINES definíció. Ezt a fordítóprogram a fejlécállomány feldolgozása során veszi figyelembe. Ha ez a sor nem szerepelne, akkor például a PORTC_bits.RC3 helyett egyszerűen lehetne RC3-at írni. Viszont akkor már nem lehet a PORTC_bits.RC3-at használni. Nagyon szép megoldás, ha a kimenet/bemenet funkcióját a program elején egy define sorral összerendeljük. Így ha valamiért az adott funkciót át kell tenni egy másik lábra, nem kell az egész forrást végigböngészni. Ebben a példában ez most elmaradt. A konfigurációs szóból látható, hogy belső RC oszcillátorról fog menni az órajel, kísérletezéshez a legjobb választás. Pontos időzítésekhez azonban nem ajánlott, mert erősen elmászik a frekvenciája a hőmérséklet függvényében, de nagyon sok alkalmazásnál nem is számít annyira a pontos frekvencia. Helyi változók alkalmazása időnként kockázatos, de ebben az egyszerű feladatban én megengedtem ezt a kockázatot, mivel megszakítást sem és egyéb más eljárást sem használ a program. Miután a kimenetek/bemenetek sorsa eldől, kezdődik a fő ciklus. Ezen belül az irany nevű változó hordozza a fő információt, e mentén történik a végrehajtás. Az egyes sorokat megjegyzéssel elláttam, ezért azokat nem magyarázom, egy kivétellel. A kimenetek beállításánál arra kell odafigyelni, amint azt korábban írtam, hogy először a megfelelő irányt kikapcsoljuk, majd az ellenkező irányt bekapcsoljuk. Itt a 0 ( nulla ) jelenti a bekapcsolást, az 1 ( egy ) pedig a kikapcsolást. Ha nem így tennénk, akkor a hidat könnyen zárlatba vihetjük. Ennél a kisteljesítményű hajtásnál nem lényeges, de nagyobbaknál arra is oda kell figyelni, hogy a ki és bekapcsolások között hagyjunk időt a félvezetőknek nyugalomba térni. Attól még ugyanis, hogy a vezérlést elvesszük, a kapcsolóelem még nem fog azonnal kikapcsolni, ezért a túl gyors váltás szintén zárlatba viheti a hidat. Tervezéskor erre oda kell figyelni. Érdemes a fenti sémát általánosan is követni, ha nem akarjuk az életünket túlságosan megkeseríteni. Általában ilyen ciklusos programok szoktak készülni a vezérlőkre, tehát némi előkészület után egy nagy hurokban kering a vezérlés. A hurok elején történik egy mintavételezés és a továbbiakban már csak ezzel dolgozik a program, a hurok végén pedig megtörténik a kimeneti lábak állapotának beállítása. Az ilyen módon megírt programnál nehezen fordul elő, hogy a kimenetek össze-vissza ugrálnak. A bemeneti mintavételnek az a jelentősége, hogy egy adott pillanatban meglévő állapotot lehet vizsgálni. Ha nem így tennénk, előfordulhat, hogy egy if utasításon belül ugyanarra a bemenetre hivatkozva egyik pillanatban még magas értéket ad, másikban meg alacsonyat. Ki lehet próbálni egy elvileg soha nem teljesülő, gyakorlaban mégis működő feltételt:
Tehát az RB0 bemenet egyenlő önmaga ellentettjével feltétel időnként teljesülhet, de ha a vett mintára írunk fel hasonló feltételt, az már nem. ( Kivéve ha... ) A cikk még nem ért véget, lapozz! Értékeléshez bejelentkezés szükséges! |
Bejelentkezés
Hirdetés |