Fórum témák
» Több friss téma |
Mivel itt nincs mit lemágnesezni így ez nem fordulhat elő, De az armatúravisszahatás az jelentkezik, ettől a visszahatástól a forgórész és a gerjesztőkör eredő gerjesztésének nullvonala elfordula a kefevonaltól, ettől nől a kefefeszültség, ami maximálisan bekorlátozott szabványokban (30V körül rémlik).
Mivel a kefék nem 0 szélességűek így 2 kommutátorszeletet rövidrezárnak, 2 szelet között induktivitás+ellenállás van és az elöbbi kefefeszültség, így rövidzárás alatt áram folyik, aminek megszakításakor szikrázik a kefe. A kefefeszültség az armatúraárammal összefüggésben van. Ezért találták ki a segédpólusok alkalmazását, amin az armatúraáram folyik át, és olyan gerjesztést hoz létre, ami a rövidrezárt komm.szeletek közötti tekercsben a feszültséget csökkenti, ezzel a szikrázást csökkenti, így növeli a megengedhető armatúraáramot. Ha jól emlékszem rozsda motorja nem rendelkezik ilyen segédpólusokkal, így maximálisan 1,5*Inévleges lehet megengedhető pártíz másodpercig.
Armatúra visszahatás... hű de régen volt, pedig tanultam róla. De az az információ, amit nem használunk feledésbe merül.
Sajnos tapasztalom én is a feledésbe merülés jelenségét.
Az elöbbi kefefeszültség az helyesen szeletfeszültség... 
Na akkor rendesen megcsinálltam magamnak a házifeladatot.Csak ne kellene szétbarmolni hozzá a gerjesztés tápját.
És vajon kibirja rövid ideig a 30A-ert?Meg valahogy mérni is kellene a külömböző értékekhez tartozó gyorsulást.Meg mezőgyengités után a végsebességnövekedést. Az egész lényege hogy kissebb áttátelt tudnék rátenni amivel pl. a végsebesség 40km/h de fürgébben indulna,majd mezőgyengitéssel elérné az 55-60km/h-át ami szerintem tökélletesen elegendő kicsinny városomba. Majd jelentkezem ha lessznek eredmények. Addigis mindenkinek köszönöm a segitséget.
Ha segít, mellékelem, hogy áramirányítós rendszerekben hogyan épül fel a mezőgyengítéses szabályozás. Ha jól értem, nálad nincs fordulatszám szabályzó kör, hanem az áramszabályzótól indul a dolog. Gondolom annak kimenő jele a pwm érték. Innen lenne célszerű a belsőfeszültség-szabályzó visszavezetett jelét venni. A belsőfeszültség-szabályzó alapjelét pedig kb. 90%-ra venném, hogy maradjon dinamikai tartalék.
A gerjesztést én biztosan nem dupláznám meg. Értelme sincs túl sok, mert a vas betelítődig, és már láttam néhány motort, aminek a gerjesztő tekercse égett le. Egyedül a szinkron motoroknál tudok olyan gyakorlatról, ahol túlterhelés esetén a gerjesztést megemelik a stabilabb működés érdekében (ezt forszázsnak hívják), de az más tészta.
Bocsi de ez sokat nem segitett rajtam.
A gerjesztésnek és a forgórész szabályozásának csak annyi köze van egymáshoz hogy egyhejröl kajálnak.Külön tápegység külön dobozban.És mivel ez az áramgenerátoros PWM forgórészszabályozás tökélletesen működik,nem is akarok válltoztatni rajta. Ha kiderül hogy a gerjesztés variálásával lehet nagyobb végsebességet és gyorsulást elérni akkor érdemes neki egy új tápot csinállni. Ma eljutottam addig hogy tudom szabályozni a gerjesztés áramát egy potival menet közben és digitmultival beállitottam pontosan 16.8A-ra.(ennyi a gyári érték) Holnap(után(vagy+még1)) tesztelgetem.Mondjuk lemérem villanykarótol villanykaróig a gyorsulást 16.8 és 20A-es gerjesztéssel.Végsebességen pedig lecsavarom 12A-er köré és majd beszámolok az eredményekröl.Én nagyon kiváncsi vagyok. Aztán egy jeladó a forgórészre-frekvencia feszültség átalakitó-komparátor ami az UC38xx IC feszültségvisszacsatoló lábát variállná a kellő időben a kellő értékre. Ha betelitődik a gerjesztés tekercse akkor az azt jelenti hogy annál erősebb már nem lessz a mágneses tér és afölött már nagyon melegszik?Mert akkor azt a pontot kell megkeresni.
Igen a telítődés azt jelenti, hogy baromi sok áramnövelés kell egy kis fluxus növeléshez, gyári érték pont oda van meghatározva ahol ez a jelenség elkezdődik, szóval hiába öveled az áramot névleges fölé, a fluxus nem nől már jelentősebben.
Szerintem egy idegen szellőztetés elkélne a motorodnak, indulásnál rendkívül felmelegedhet, mert nincs hűtése, de terhelése meg rengeteg van. Gerjesztés álló állapotban is melegít, amit megint nincs mi kivigyen a gépből...
A hatásvázlatban foglaltak, és ahogy te szeretnéd csinálni, a legfőbb különbség ott van, hogy te -ha jól értem- adott fordulatszám fölött csökkentenéd a gerjesztést. Lehet így is, de ennél jobb és egyszerűbb, ha nem a motor fordulatszámát figyeled, hanem azt, hogy a forgórészt tápláló pwm kitöltési tényezője hol tart. Nem kell a rendszert átalakítani, csak egy jelet kivezetni belőle. A szabályzó akkor kezdje csökkenteni a gerjesztést, ha a pwm értéke már majdnem 100%.
Nem tudom, hogy milyen arányban akarod a gerjesztést csökkenteni, de ennek kézben tartását egy szabályzóra szokás bízni, ez a belső feszültség szabályzó (a gerjesztő áram alapjelet úgy változtatja, hogy a motor belső feszültsége állandó legyen). A gerjesztő áram alapjelét, pedig a gerjesztő áram szabályzó hozza létre. Egy-egy ilyen szabályzót legegyszerűbben műveleti erősítővel lehet létrehozni, és mivel PI jellegűek, egy soros RC visszacsatolással kell ellátni. Az R és C értékét a szabályzó optimalizálása során kell belőni, a gerjesztőkörben a motortól függően 0,5...2sec időállandó várható. A külső szabályzó kör legalább 2-szer olyan lassú legyen, mint az alárendelt kör, de inkább 5...10-szer. Belátom, hogy ez számodra esetleg totál érthetetlen. Azt a szakterületet, ami ezzel foglalkozik, azt úgy hívják, hogy Szabályozástechnika. A hajtásokkal foglalkozó irodalmak valamilyen mélységben foglalkoznak ezzel (pl: Halász: Villamos hajtások), de van külön irodalma is; dr. Magyar Péter dr. Lakatos Lóránt: Áramirányítós rendszerek szabályozása. Foglalkozik a témával röviden a U.Tietze Ch.Schenk: Analóg és digitális áramkörök (MK,Bp. 1990) című könyv is, néhány oldalt mellékelek belőle (az egyik oldalt véletlenül megdupláztam, bocs).
Ez tényleg kicsit kinai nekem.És lehet nem is kell ebbe a témába belemerülnöm.Mit kell érteni pontosan a motor belső feszültségén.
Méricskéltem a gyorsulást egy kicsit.Egy kb 40 méteres egyenes szakaszon 16.8 és kb 20A-es gerjesztés közőtt két tized másotpec eltérést mértem.10m-es szakaszon nem volt külömbség pedig nekem itt kellene hogy erősebb legyen.Érdekes hogy a kocsi megmozditását lükvercben is nehézkesen teszi pedig ott sokkal kissebb az áttétel.Magyarul ez igyveszett. A mezőgyengitést még nem sikerült kipróbálnom de majd beszámolok arrol is.
Talán ismerős azt alábbi képlet:
Uk=Ub+I*R A DC motor kapocsfeszültsége egyenlő a belső feszültséggel plusz az áram és a forgórész impedanciájának szorzatával. A belső feszültséget gyakran indukált feszültségnek is nevezik. Hozzátartozik, hogy a belsőfeszültség-szabályzó elnevezés az eredeti elméleti célról kapta a nevét. A gyakorlatban sokszor a kapocsfeszültségre szabályoznak vele, vagy a dinamikai tartalékot garantáló gyújtásszögre (áramirányítós hajtások), vagy amit neked ajánlottam, pwm-es teljesítmény fokozat esetén adott kitöltési tényezőre történik a szabályozás.
Sziasztok!
Én is építek egy vezérlőt, de némi problémám akadt. Az áramkorlátot úgy gondoltam, hogy nem a kitöltést veszi vissza, hanem a vezérlést szaggatja. Az árammérő ellenállás feszültsége átlagolására a műveletik bemenetére raktam kondenzátort, de a 100n nem bizonyult elégnek, ezért 100u-ra cseréltem. A kérdésem az, hogy ettől függetlenül miért nem a bemenő jelle arányos az erősítő kimenetén látható jel, (mivel abban nagy tüskék láthatóak)? Tehetek a műveleti erősítő kimenetére is kondenzátort? Milyen kondenzátorok szükségesek, hogy ez a fajta áramkorlát megfelelően működjön? (Hiszterézis...) Kell a motorral párhuzamosan is kondenzátor? A motor 48V/1kw max)
Szia.
Nekem annó nem sikerült shöntös áramkorlátor késziteni.Igaz 5.2KW-os motorrol volt szó és nem is igy nézett ki az áramkorlát.Olyan szinten tele volt zavarral és tüskékkel a shöntnek a jele hogy használhatatla volt. Biztos hogy jó ötlet a vezérlést szaggatni?Mert szerintem ebböl komoly motorrángatás lessz.Mikor a shöntel bajlódtam a műveletik mindenre kapcsoltak (tüskék) csak arra nem amire kellett volna és a végeredmény egy rángatózzó motor lett.Nem volt ideális.Szerintem a kitöltést kellene visszavenni vagy eleve áramgenerátort csinállni. Én nem értek hozzá de szerintem a műveletik bemenetén az az 1K és 100n,nomeg 100u az közel nem az az érték ami ide kellene. De miért ilyen szemetes a jel?És a műveleti neminvertáló lábán is?A motorral párhuzamosan milyen diódák vannak?
Szia!
A kapcsolás olyan elrendezésű, hogy a söntön csak akkor folyik áram, amikor a fetek bekapcsolnak, tehát normál üzemben sem a motoron folyó DC áramot látod rajta, hanem csak abból kiszaggatott darabokat. Ezt a problémát szerintem nem lehet szűréssel megoldani. Helyesebb koncepció volna szerintem is, amit rozsda javasol. Ilyen elrendezésben működik az UC3844, és a hozzá hasonló változatai, amelyek eleve áramvezérelt szabályzó IC-k, szerintem inkább azzal kéne megpróbálni. A műveleti erősítők általában rosszul viselik, ha direktbe kondenzátort teszel a kimenetükre, belenghetnek, stabilitási problémák léphetnek fel. Megfelelő nagyságú soros ellenálláson keresztül viszont lehet.
Rozsda, Peter65! Nem motorral próbáltam, hanem ellenállással, meg egy kis ellenállású tekercsel, az áramfigyelő részben pedig egy db ellenállás volt. Először is amilyen kapcsolást láttam, ott a motorral párhuzamosan is volt egy nagy értékű kapacitás. Kérdezem, hogy ez működőképes megoldás a motorra jutó feszültség/áram simítására?
Számítottam rá, hogy nem ez lesz a legjobb megoldás, most a következőkön gondolkodok: 1. az áramkorlát szaggatásának lenne egy minimális ideje, egy időtartam, aminél rövidebb időre nem állhat le a vezérlés, azaz a fetek impulzusát is lehetne szinkronizálni hozzá... 2. Mi lenne, ha a söntellenállások az akkuk és egy nagy kondenzátorbank közt lennének, amik a vezérlőn lennének, vagyis nagymértékben egyenletes áram folyna rajtuk? Az egész vezérlőt "fiókban található" alkatrészekből akartam összehozni. A gond az, hogy a műveletik bemenetén nagyjából sima feszültség lesz a 100u-os kondenzátortól, de a kimenetük mégis nagyon zavaros, tüskés, esetleg még az IC-k tápfeszültségében keletkezik hullámosság ("négyszögesség"). Lehetséges, hogy megpróbálkozok majd áramváltóval és TL494-es icvel, de az csak 90%-os kitöltést tud. Áramváltó sem jött be?
Nem értem, miért nem jó neked egy olyan megoldás, amit a rozsda is használ? Ha a motoráram elér egy értéket, akkor kikapcsol a FET, ha meg lecsökken egy adott értékre, akkor meg bekapcsol. Tehát, az érzékelendő áram az a motoráram, azzal kösd sorba a söntöt, vagy tegyél bele fojtót és integráld meg a fojtón eső feszültséget. Ha visszaolvasol a komplett rajz fenn van, működéssel, szimulációval, stb. amit rozsda használ az autójában.
A motorra pwm táplálás esetén nem ajánlatos kondit tenni. A félvezető bekapcsolásakor igen nagy áramok fognak a kondin keresztül kialakulni. A nagyfrekis (kommutáció okozta) zavarok szűrésére érdekben szoktak kis kapacitású kondit a motorra tenni, de ilyen esetben jobb azt is kerülni.
A motor áramának a hullámosságát viszont hasznos lehet csökkenteni, de arra nem kondi, hanem sorba kötött fojtó kell. Ha érdemi szűrést akarsz, legalább a motor forgórészköri induktivitásával azonos nagyságrendű fojtó kell. 1. elgondolásoddal kb. ugyan azt akarod, mint ami az UC3844-ben és társaiban már készen van. 2. elgondolásoddal a motort termikusan meg tudod védeni, de mást nem, mert nagyon lassú lesz. Egy jó áramkorlátozással ellátott szabályzó saját magát is megvédi a külső zárlatokkal szemben. A sönt jelének mérésénél fontos a konstrukció. Akár a föld vezetéken eső feszültség is megzavarhatja ilyen mértékben a mérést. Több mint tíz éve készítettünk egy 10kVA-es tápot UC384X-gyel. Abban áramváltót használtunk. A főáramkör kapcsolási elrendezése hasonló volt, a kapcsoló IGBT kollektorában volt a ferritgyűrűs áramváltó. Ebben az alkalmazásban kihasználtuk, hogy a kapcsoló elemen nem folyik át állandóan az áram, hanem csak a kapcsolások ideje alatt. Az is igaz, hogy nem engedtünk meg 100%-os kitöltési tényezőt, mert akkor nem tud lemágneseződni az áramváltó, és telítésbe megy. Kicsit lehet emelni a TL494-es kitöltésén az RC tag variálásával.
Mit értesz motoráram alatt? Eddig talán nem azt mérte a sönt? Rossz helyre tettem volna? Most már csak azért is megépíteném az egyik kigondolt megoldásomat... bár vonzó az áramgenerátoros meghajtás, mivel azzal közel lineárisan lehetne a teljesítményt szabályozni.
Ha a DT-t kb. minusz 100mV körüli értékre teszed, akkor közel 100 %-os kitöltés is elérhető.
Nálad a söntáram szaggatott. Amit én javaslok, az az igazi motoráram. Mivel a motor árama vagy a tranyón, vagy egy diódán folyik, így az nem szakad meg. ( nem is szakadhat meg... ) Erre írtam, hogy motoráram, vagyis a söntöt olyan helyre tedd, ahol a tényleges motoráram folyik át rajta. Másik kérdés, hogy nagyon nehézkes úgy megcsinálni, hogy a söntről értékelhető jelet kapjál. Nem lehetetlen, de jóval egyszerűbb és jobb megoldások is léteznek az adott feladathoz.
Sok mindent meg lehet építeni, kipróbálni, de én úgy látom, hogy nagyon kezdő vagy ebben a dologban. Csak a felesleges köröktől gondoltam, megkíméllek...
Hali!
Bocs, hogy beleírok! Fesz. szabályzót keresek max 500W-os DC motor 12V. feszültségére. Amit tudnia kell azt ezzel a videóval érzékeltetem:itt vagy itt ez az utóbbi példa csak a működést illusztrálja mivel az egy szervó moci és nekem sima dc mocihoz kell a vezérlés. Ha valaki tud az első videón látható vezérlést megvalósító kapcsolásról kérem ossza meg velem. Üdvözlettel:Sumi ide is be linkeltem mert nem biztos, hogy az egyszerű vezérléshez való bocs
Az első videón egy vízszintes pozíció szabályozás van, gondolom, ami potifélét tologat, az egy jeladó, pl: ha jobbra tolja, akkor a feszültség mondjuk 0 és +10 V között, ha meg balra tolja akkor 0 és -10V között változik. A középállás nulla feszültséget jelent, ekkor az a harmonikaszerű izé középen van. Gondolom, a motor alatt az a hosszú csíkszerű valami egy távadó, mely a harmonika helyzetéről ad jelet a szabályozásnak. Szintén, az előbbihez hasonlóan, ha jobbra megy akkor 0 és +10 V között, ha balra mozdul, akkor nulla és -10 V között van a feszültsége. A szabályozókör arra törekszik, hogy a két jel egyforma legyen. Tehát, ez egy pozíciószabályozó, vagy lehet, hogy van valami más neve, de a lényege ez.
A másik videó meg ehhez hasonló, csak ugyanarra a szögelfordulásra szabályozza a kacsát, mint amit a potival beállítanak. Egyik megoldás sem egyszerű, kell hozzá egy teljes híd, mert forgásirányt is kell változtatni. Persze lehet ezt megkerülni, hogy van egy offsetje, tehát a nulla helyzet mondjuk +5V-nál van, ehhez képest ha jobbra mozdul, akkor az alapjel +10V, ha meg balra, akkor közeledik a nullához. Lehet analóg szabályozás, de biztos megy valami PIC-kel is. Lényeg, hogy kell hozzá egy legalább 100 A-es híd, áramkorláttal, stb... Elég bonyolult egy ilyet kifejleszteni, nem hiszem, hogy csak úgy találsz ilyen komplett rajzot.
Igen az elgondolásod valószínű működne koncentráljunk a vezérlésre a végfokozat egyenlőre "lényegtelen" én ennek a kapcsolásnak a tovább fejlesztet verziójára gondoltam természetesen a relé helyett lehet híd kapcsolás is.Ezzel "csak" az a baj nem lehet pozicionálni.
Ez egy szabályozóköri feladat. A szabályozások alapvető tulajdonsága, hogy van egy alapjel - pl szögelfordulás, vagy egy referenciafeszültség, stb. És van egy visszavezetés, mely azt mutatja meg, hogy a kimeneti jellemző megfelel e a beállítottnak. Vagyis kell lennie valami távadónak, vagy valaminek, ami valahogyan mutatja a szabályozott jellemző aktuális értékét. A szabályozó ezt a jelet és az alapjelet hasonlítja össze. Ha valamilyen irányban eltérés van, akkor olyan irányú beavatkozást végez a kimenet felé ( a szabályozott jellemző felé ), hogy a hiba csökkenjen, vagy eltűnjön.
A linkelt rajz nem ilyen, semmiféle visszavezetés nincs a kimeneti jellemzőről, tehát, ez nem lesz szabályozott sosem. Bocs, ha ezt mondom, de ha nem foglalkoztál korábban ilyesmivel, akkor nem fogod tudni megoldani ezt a feladatot, mert ez a látszólagos egyszerűsége ellenére egy nagyon bonyolult probléma. Jó néhány könyv van ami szabályozástechnikával foglalkozik, de ezek már nem a hobbiszintbe tartoznak.
Szia
Nem foglalkoztam még ilyesmivel, egy két dolgot forrasztgattam az is régen volt. Amit ebben a témában (Dc.motor)csináltam az egy lágy indítás "N" méretű modellvasúthoz,és a irányváltós tápját. Természetesen rajz alapján. Mivel elektromos hálózatokkal foglalkozom a forrasztgatás tényleg csak hobbi szinten űzöm. Amit küldtem rajzot csak gondolat ébresztőnek küldtem. Gondolom, hogy nem egyszerű a probléma de a fórumon annyi hozzá értő ember értekezik többek te is hátha a hozzászólásokból össze lehet rakni valami értelmeset.Itt van egy Magyar példa.Amit blaskojanos2 töltőt fel a You Tube-ra. Tehát a lényeg saját kútfőmből nem tudom megcsinálni, de közösen van rá esély.
Szia!
Olvastam több fórumban is a kérdésed. Kész kapcsolási rajzom nincs. Elvileg tudom a megoldást, de ez nem hobbi kategória. Korábban próbáltam már másnak segíteni szabályozástechnikában itt ezen a fórumon is, ((#1013938) Peter65 válasza rozsda hozzászólására Válasz • Jún 23, 2011), de nem sikerült úgy, hogy meg is értsenek. A szabályozástechnika külön terület, amiben egyébként szintén világhírűek a magyarok (a vektoros frekiváltós szabályozás Rácz István és Kovács Pál alapozta meg, de Magyar Péter neve is világhírű a szabályozástechnikában). Van irodalma, ha érdekel, segítek megtalálni. Hogy valami konkrétat is mondjak: Régebben műveleti erősítőkkel felépített szabályzókat használtak, ma már általánosak a digitális szabályzók. Neked valami ilyen szabályzó kör kellene analóg vagy digitális megvalósításban: Pozíció szabályzó alárendelt fordulatszám-szabályozó körrel, ami alárendelt áramszabályozó kört tartalmaz. Elsőre nem találtam, csak fordulatszám szabályzóra vonatkoztatott blokkdiagramot, azt mellékelem. A pozíció szabályzó visszavezetett jele a fordulatszám visszavezetett jelének integrálja elvileg, azaz egy impulzus kódadó esetében az impulzusok száma. Persze lehet külön pozíció érzékelő; potméter, valamilyen útadó, stb.
Nézz körül a CNC-s topicban, az hasonló téma.
Hello!
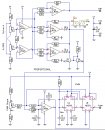
Ha alaposan átrágva elolvasod a kollégák hozzászólását, akkor rájössz, hogy amit szeretnél, az nem egy "asztal sarkán reszelgetős BSS technika". A szabályozás külön szakma, amivel egyesek "életüket töltik el". De a dolgok minimális megértéséhez is el kell sajátítani minimálisan az alapokat, hogy értsd miről van szó, és átlásd a problémákat buktatókat. Abban tévedsz, hogy "a végfokozat egyenlőre lényegtelen". Mert előbb mindenképpen azt kellene létrehozni, valamint a mozgás visszacsatolására szolgáló jeladót. A szabályzónak majd a végfokot kell vezérelnie, és annak kimeneti jeleit illeszteni kell a végfokozathoz. Pontosabban olyan kimeneti jelekkel kell rendelkeznie, ami alkalmas a végfok vezérlésére. Ha a végfokozat és a mozgást visszajelző jeladó mechanikailag már elkészült és működőképes, akkor kezdődhet hozzá a szabályzókör "tervezése". Hogy ne csak az akadályok felemlegetése legyen napirenden, rajzoltam számodra egy kapcsolást, ahol már van visszacsatolás a körben. Ez alapvetően egy analóg áramkör, aminek vezető jele egy poti, és a mozgás visszacsatolását is egy potiról nyeri. A két poti állása közti különbség vezérli a szabályzót. A szabályozás itt (még) arányos típusú. Tehát a végrehajtó jel nagysága (PWM kitöltése) a potik állása közti differenciával arányos. Alapvetően két kimenet van. Egy logikai "DIR" ami jelzi, hogy a motornak milyen irányban kellene forogni, és egy PWM ami a differenciával arányos kitöltésű négyszögjel. De mindenképpen jelezném, hogy a rajz, csak az alapfeladat átlátásához - megértéséhez megfelelő. Ezen kívül még számtalan megoldandó probléma van, amire most szerintem még nem is gondolsz.. üdv! proli007
Szia!
Sajnos én már nem tudom az életemet a szabályzás technikának áldozni mivel az nagyából már mögöttem van. Ügy gondoltam mivel életem folyamán forrasztgattam hobbiszinten ezt azt ennek az össze állítása sem jelent problémát Rc. vezérlés nélkül. Nos úgy látom egy kicsit túl van bonyolítva.Egyébként igazad van nem kell a feladatot pl. végfok. külön kezelni.
Ezt nem nehéz megcsinálni, de ez nem szabályozás, ugyanis, a beavatkozást nem figyeli semmi, vagyis nincs visszacsatolás arról, hogy a kiadott parancs megvalósult e. Ez csak egy vezérlés, ami attól működik mégis szabályozott szakaszként, hogy te a szemeddel követed, hogy mikor áll jó helyzetben a kormánymű. Ha úgy ítéled meg, hogy jó, akkor elengeded a távirányítót. Tehát, a visszacsatolás, ami érzékeli a kimeneti jellemzőt ( itt a kormánymű elfordulása ) a szemed, a kezed pedig egyfajta beavatkozó szerv, mely elindítja, vagy leállítja az elektronikán keresztül a motort. A tényleges szabályozás, pl az a kacsás video volt, mert ott a kacsa a tengelyen pont annyit fordult el, amennyi be lett állítva az alapjel potival. Ha megfigyelted, akkor egy kicsit tekertek ezen a potin, elvette a kezét és ugyanolyan szögbe áll be a kacsa. Ez csak úgy jöhet létre, ha valami visszajelzés érkezik az elektronikába a kimeneti jellemző állapotáról, jelen esetben a kacsa helyzetéről.
Tehát, a kormánymű az csak egy vezérlés, amivel távolról tudod állítani a helyzetét, de ez addig fordítja el a kormányt, ameddig nyomod a távirányítót. Ahol elengeded, ott áll meg, tehát, ez csak egy kikapcsolom, bekapcsolom. Ez jó pl.: az RC modellekhez, hiszen látod, hogy a modellautó mennyire kanyarodott, vagy milyen gyorsan megy, stb. Egy CNC-ben ez már kevés, hiszen ott számítógép mondja meg, hogy melyik pozícióba kell állnia a fejnek(?). Erről viszont kell visszajelzés, mert nagyon pontosnak kell lennie. Talán sikerült érzékeltetnünk, hogy mi a különbség a vezérlés és a szabályozás között. Neked kell eldöntened, hogy melyikre van szükséged, nyilván annak tudatában, hogy mire akarod használni. Egyébként, tetszik a felhőd... különösen az alakja... 
Kösz az értékes hozzáoszlásod
 amit írsz abból ítélve nekem vezérlésre van szükségem. egy kb. negyven centis hosszban szeretnék egy menetes tengelyen mozgatni egy "kocsit". Nyomatékban egy Zsiga ablaktörlő motor megfelelő lenne. mondjuk nem ártana nyomaték figyelő is az áramkörben de ez már csak hab a tortán.Vissza jelzőnek egy fotoellenállást használnék csőbe szerelve melyben egy led mozogna az iránynak és sebességnek megfelelően Így ezen a távon 100K.ohm-5K.ohm között változik az ellenállás értéke. Ez használható jeladónak?Ez lenne a lényege a problémámnak. amit írsz abból ítélve nekem vezérlésre van szükségem. egy kb. negyven centis hosszban szeretnék egy menetes tengelyen mozgatni egy "kocsit". Nyomatékban egy Zsiga ablaktörlő motor megfelelő lenne. mondjuk nem ártana nyomaték figyelő is az áramkörben de ez már csak hab a tortán.Vissza jelzőnek egy fotoellenállást használnék csőbe szerelve melyben egy led mozogna az iránynak és sebességnek megfelelően Így ezen a távon 100K.ohm-5K.ohm között változik az ellenállás értéke. Ez használható jeladónak?Ez lenne a lényege a problémámnak. |
Bejelentkezés
Hirdetés |