Fórum témák
» Több friss téma |
Találtam egy vonalkövető robotot: http://www.kmitl.ac.th/~kswichit/LFrobot/LFrobot.htm Ezt h lehetne piccesíteni? tehát mit kell módosítani a SWben meg a HW-ban h le lehssen cserélni az atmel-t Pic-re?
Persze, lehet ezt módosítani. De a hardvert igazítani a lábkiosztáshoz, a szoftvert pedig teljesen át kell írni. De aki át tudja írni, az már tud tervezni is egy ilyet robotot, talán még egyszerűbb is...
Üdv mindenkinek!
Külön Magornak aki nem is sejti, hogy milyen kemény dióba akar harapni! Érdeklődve olvastam a vonalkövető robot építése körüli vitát főleg azért mert digitális rendszerben gondolkodik majdnem minden hozzászóló ez pedig új távlatokat nyithat ezen a téren az intelligens működés tekintetében Az ismereteket bővítendő: Már húsz éve ismert olyan vonalkövető és digitalizáló berendezés mely max. A3 as méretű rajzlapra tussal vagy tollal rajzolt ( lényeg, hogy kontrasztos legyen) egyenes vagy ívelt 0,2 - 0,8 mm közötti folyamatos vagy változó szélességű vonal automatikus követésére és egyidejűleg digitalizálására szolgál, jobb mint +/- 0.05 mm pontossággal! Az A3 as felület derékszögű koordináta rendszere repülő origós, bármely pontja század mm es pontossággal kijelölhető origóként. Digitalizálható legkisebb vonalgörbületi sugár: kb. 1,0mm A vonalkövetés automatikusan történik max. 3mm/sec. sebességgel. A vonal követésének elve és folyamata : A vonalon tartózkodó követő fej a pillanatnyi tartózkodási pontban meghatározza a vonal érintőjét mellyel egyidejűleg a követő fej és haladási vektora befordul az érintő síkjába így ezzel kijelöli a haladási irányt a vonal következő szomszédos pontja irányába. Mivel a követő fej egy x-y irányba mozgó kocsi szerkezeten helyezkedik el, (hasonlóan az x-y sík plotterhez, ahol a követő fej helyén ceruza van) a vonal vizsgált pontja érintő síkjában fekvő haladási vektor a derékszögű koordináta rendszer x irányába cosinus , y irányba pedig sinus komponensekre válik szét. E komponensekkel arányosan mozgatott x és y léptető motorok mozgásának eredője továbbítja a szomszédos vonal pontig a követő fejet. Az új pontban a követő fej újra megállapítja a pont érintő síkját, ráfordúl stb-stb és ismétlődik minden addig míg tart a vonal. A vonalon haladás a vonal tengelyében történik (ezért képes változó szélességű vonalat is pontosan követni ). A rendszer „vonalat fogó” érintő síkba beállító része analóg, a fej vonal menti továbbító (mozgató) része valamint a digitalizáló része –értelemszerűen- digitális. Ez a vonalkövetési módszer elméletileg is rendkívül korrekt és pontos, határt csak a mechanikai kivitel jelent. Ez könnyen belátható a vizsgált vonal pontjainak minden határon túli sűrítése eredményeként a követés tökéletesen folyamatossá válik! Tulajdonképpen már így is az, mert a digitalizált koordináta párok akár 0,01 mm ként lekérdezhetők. Hátránya hogy bunkó! Ha keresztező vonalat talál zavarba jön és csak ő tudja, hogy merre fog menni. Ha a tiszta digitális követő rendszer legalább ennyit fog tudni az már maga lesz a csoda. Nem szólva az akkor megjelenő intelligencia előnyeiről! Bocsi, hogy terjengős voltam. Ha valakit még érdekelnének egyéb részletek is szívesen állok rendelkezésre akár fotóval is. Sok sikert kívánok a fejlesztőknek!!
Bár régi a téma, de szerintem ezt kerested. (melléklet)
Ha már megoldottad, akkor bocs.
Hello mindenki végiglvastam a topicot de nem kaptam választ a kérdésemre tehát ugy gondoltam felteszem... Elég kezdő kérdés de nagyon érdekel a téma.Szóval ezek az érzékelők amikkel egy ilyen robot tájékozódik pontosan milyen érzékelő (neve típusa?)?
A másik kérdés valami magyar oldalt tud valaki ahol talalok infót ilyen robotokról?
Látom készülsz a versenyre.
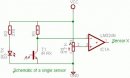
Helyes, helyes. Magyar oldalt nem tudok, külföldi van rahedlivel, google, line following robot a varázsszavak. A vonal érzékelését infraled + infratranyó kombóval szokás végezni. Plusz egy műveletierősítő amivel normálisan mérhetővé teszed a jelet egy mikrovezérlő számára. ld. csatolmány.
Köszi a segítséget. Nos a versenyre nem biztos h el tudok menni(a távolság miatt) De azt elhatároztam h építrek egy ilyen robotot.Kösz as segítséget.
én ma voltam a 100 ft os boltban és vettem iylen vonalkövető kisautót 500 ( ötszáz) forintért
nagyon f@sza , jó kicsi is , 1 oiylet át tudnál alakítani 
Sportszerűnek sportszerű lenne. Úgysem nyerne vele.
Igen bonyolult vezérlés kell ahhoz, hogy versenyképes legyen a cucc.
Sziasztok!
Egy japán emberke oldalán van komplett leírás (rajz + progi): http://elm-chan.org/works/ltc/report.html Kicsi, ügyes, aranyos... Egyébként vannak ott még ettől jobb dolgok is...
Megnéztem ezt az oldalt. Nagyon durva. Semmit nem kacsázik. Hogy csinálta???Jah és 1 db ICvel csinálta meg, jóformán semmi hardver. De minek oda olyan sok érzékelő?
Én is meg akarom építeni ezt a robotot. Egyelőre a vezérlésen agyalok nagyon sokat(máson nem is lehetne  ). Nem lehetne vhogy logikai IC-kkel úgy megoldani,hogy sok szenzort(kb 4-et) rakok egymás mellé a vonalra és ha bejelez az egyik akkor fordítsa a szervót,de persze finoman.Minél több szenzor jelez, annál erősebben fordul. Mivel még kezdő vagyok vmi egyszerű,de nagyszerű megoldást keresek,de sztem úgyis PIC-kel fogom megcsinálni.Nem valószínű, hogy meg lehet ezt csinálni egyszerűen jóra. ). Nem lehetne vhogy logikai IC-kkel úgy megoldani,hogy sok szenzort(kb 4-et) rakok egymás mellé a vonalra és ha bejelez az egyik akkor fordítsa a szervót,de persze finoman.Minél több szenzor jelez, annál erősebben fordul. Mivel még kezdő vagyok vmi egyszerű,de nagyszerű megoldást keresek,de sztem úgyis PIC-kel fogom megcsinálni.Nem valószínű, hogy meg lehet ezt csinálni egyszerűen jóra.Hol lehet kapni 500 FT-ért ilyen robotot? Csak hogy tanulmányozzam.Persze alkatrészforrásnak sem utolsó.
a sok érzékelő az csak azért kellett neki hogy pontosabban tudja érzékelni az eltérést a vonaltól,
és egy PD szabályzóval tudta ilyen szépen követni a vonalat. A Deriváló tag felelt azért, hogy a szoftver meg tudja állapítani hogy a vonal kb milyen irányban folytatódik, és így pontosabban tudja pályán tartani. Az alján van két videó, egyik csak P szabályzóval, annak még elég ostoba mozgása volt, de kiegészítve D-vel sokkal szebben rásimult a görbére. Az egész csak szoftver kérdése.
Szia Alex!
Miért nem ezt építed meg? Megvan hozzá minden, csak nyákot kell tervezni, az meg nem nagy kaland. De ha feltétlenül PIC-cel akarod megoldani, akkor az AVR-es forráskódból ki tudsz indulni és a végére azt is megérted majd, hogy hogyan működik a szoftver...
Olvass
InfraLED pl. tv táviránytóból, ir tranyő, műv. erősítő meg kapható a legtöbb elektrós boltban.
nem tuom kapható-e M.o.-n, de pl ilyen a CNY70
Attól függ milyen?
Vannak olyanok amik csak a távirányító 38 khz körüli frekivel modulált jelére kapcsolnak. Ezek mellé nem kell műveleti erősítő, viszont az infraledet PWM-el kell hajtani. Viszont van olyan videó/ tv/ akármi amiben csak egy szimpla infraérzékeny fotodióda van. Ezekhez meg ott a feltöltött kép.
Az a baj, hogy deriválni még nem tudok. 11.es gimnazista vagyok. Evileg januárban vagy februárban vesszük matek fakton. Programozni sem tudok még jól. Az a baj, hogy így egyedül nem túl könnyű. Vki esetleg segíthetne megérteni, hogy is működik az a szofver ami kiszámítja az útvonalat? Halandónak is érdemes próbálkoznia vele?
és akkor az a fekete csik viszaveri az infrát és igy érzékeli?
végre már értem |
Bejelentkezés
Hirdetés |