Fórum témák
» Több friss téma |
Ha jól be van állítva a gép nem téveszt, a 3D nyomtatóm sem tévesztett soha, persze ha fémet kell megmunkálni az más azt nem tudom.
De a legtöbb ilyen hozzászólás hogy építeni akarok egy gépet és léptető vagy szervó legyen benne szerintem nagyon messze áll attól hogy a gép elkészül valaha, pl anyagi nehézségek miatt is. Meg ha kell egy komoly gép fém megmunkálásra akkor érdemes egy régi használt vázat venni és azt CNC -re átalakítani, egy öntvény gép stabilitását úgysem lehet házilag megcsinálni. Ezért sok olyan van amin kár is vitatkozni.
Idézet: „Létezik inkrementális jeladóval egybeépített léptetőmotor...” Onnantól meg szerintem értelmét veszti a léptetőmotor mibenléte a rendszerben.
A léptetőmotor akkor is léptetőmotor.
Nem a visszacsatolás csinál belőle szervót, hanem az arányos szabályozás. A digitális komparátor egy eszköz a hibajelképzésre, de a lépteccsel egybeépített enkóder csak a már megtörtént lépésvesztésre tud helyesbíteni, a rendszerre érvényes egész lépéssel, a szervómotoron lévő forgójeladó pedig a motor szöghelyzetet visszacsatolva a hajtásvezérlőre a helyén tartja a motort, szinte a terhelési viszonyoktól függetlenül, a három fázistekercsre adott árammal elforduló mágneses teret hoz létre így infinitezimális lépést is tud tenni.
Hali!
nem egészen értelmetlen..., így detektálható az esetleges lépésvesztés
Most meg elköveted azt a hibát, hogy erőltetett példával bizonyítod: rengeteget költhetsz egy nem szabályozható folyamat kézben tartására, vagyis szervóként használhatod a léptetőmotort, úgy, hogy nem tudod kihasználni a szervómotor többi előnyét, mint például a hatalmas nyomaték, és a nagy fordulatszám. (jól tudom, hogy csak a 6400-as enkóder árából akár egész léptetőmotoros gépet lehet venni?)
De még mindig csak a motor mozgatását "szabályozod" nem a megmunkálási folyamatot, nem tértél ki arra, hol veszed figyelembe a mechanika holtjátékát, és a forgácsolóerő okozta rugalmas alakváltozásokat...
Összetéveszted a célt és az eszközt!
A mozgást akarjuk szabályozni, nem a motort akarjuk más üzemmódban használhatóvá tenni, ugyanis a fizikai képességein semmilyen ügyes meghajtással nem változtathatunk. Ha virtuálisan tízezerlépéses léptetőmotorral lépegetsz, az akkor sem lesz szervó.) A hozzászólás módosítva: Jan 1, 2016
Nem a használatát nevezte értelmetlennek, hanem a léptetőmotornak nevezést.
Ha a léptetőmotort drága, gyenge, rossz szervóként hajtjuk, valóban nem sok értelme van léptetőmotornak hívni, de valódi szervóhajtásnak nevezni önámítás.
Szeretném segíteni, hogy mindenkinek világosabb legyen a léptető- és szervomotor és a villamos meghajtásuk közti hasonlóság és különbség.
A léptetőmotor és a szervomotor (és a BLDC) motor egy tőről fakadnak, mindegyik a szinkron gépnek valamilyen elfajzott változata. A közös jellemző, hogy valamilyen mágnes és a forgó (vagy lépő) villamos mező hozza mozgásba őket. A különbségek inkább konstrukciósak; a léptető motor olyan kialakítású, hogy álló állapotban is nagy a reluktancia nyomatéka, a szervomotort pedig nagy dinamikájú mozgásokra optimalizálták. Ezért, mint már fentebb olvasható, lehet mindegyiket villamosan úgy meghajtani mint a másikat (pl.: az erőművekben a gázturbinák szinkron-generátorát léptetőmotorosan indítják), de ezt mindig a feladat szerint érdemes kiválasztani. Lehetnek átfedések, érdekes megoldások, amelyeket hasznos lehet megismerni, pl.: Bővebben: Link A hobbi kategóriában mindig a költséghatékony, kis háttér ismeretet igénylő megoldásokat választjuk, ezért terjedtek el a léptetőmotoros vezérlések. Itt ebben a témában is szinte csak ilyen megoldásokról lehet olvasni, és ezek között is jelentős minőségi különbségek vannak. Már a szabályozott DC szervo hajtásokról sem nagyon tudok, hogy hobbi szinten terjedne, pedig nagyon régóta leírt, jól dokumentált a szabályozástechnikája, nem is annyira bonyolult, de mégis túl nagy feladat ahhoz, hogy hobbi szinten megvalósítsák. Ezért nem gondolom, hogy a szervo-hajtások építése, amelyeknek akár csak a szabályozástechnikája jóval összetettebb, akár itt a HE oldalain egy népszerű témává válna a jövőben.
Azt leszámítva hogy alapvetően igazad van, már itt önellentmondás van:
Idézet: „szervomotor (és a BLDC) motor egy tőről fakadnak, mindegyik a szinkron gépnek valamilyen elfajzott változata.” Idézet: „a szabályozott DC szervo hajtásokról” Na jó, tényleg eléggé elfajzott  A hozzászólás módosítva: Jan 2, 2016
Sajnálom, ha félreérthető voltam. A DC szervo motor(kefés) eredete nem a szinkrongép, hanem az egyenáramú gép. Az egyenáramú gép olyan változata aminek a konstrukciója a dinamikus igények figyelembevételével lett kialakítva. Értelemszerűen ennek más a szabályozástechnikája, ami szerintem egyszerűbb, mint azoknak a szervomotoroknak, amelyek a szinkrongép egy változatát jelentik.
(sajnos a magyar műszaki nyelvben a "szervomotor" szóval több mindent jelölünk: pl.: 1. a fentebbi hozzászólásokban a szinkron motor egy változatát értették rajta szerintem, 2. a dinamikai igénybevételre optimalizált motorokat, működési módjuktól függetlenül (DC szervo, asszinkron szervo), 3. a modellezésben egy olyan egységet értenek rajta, aminek szöghelyzetét impulzus szélesség modulációval lehet vezérelni...) A hozzászólás módosítva: Jan 2, 2016
Valoban megint nyelvtani kérdés, illetve nyelvünk elképesztö pontatlansága a ludas ( amit egyesek még forsziroznak is, és a nyelvészek ezt nagyban türik).
Gyakoraltilag kimondottan szervomotor nincs is, csak szervo hajtás - aminek a lényege, hogy valamit követ, azaz a kezelö kiadja a parancsot, a szervohajtás meg ezt elvégzi (teljesen mindegy, hogy milyen motorral vagy milyen elven). Itt keverednek a fogalmak. A "szervomotor" lehet akár hidraulikus is (sok robot igy müködik).
Igen erre akartam a figyelmet felhívni: ha már épp a szervó és a léptető hajtás közötti különbségről beszélünk, ne ragadjunk le ott, hogy CNC megmunkálás esetén akár ugyanarra is használható, és kompromisszumokkal van átjárás közöttük. Más a szabályozástechnika, a mechanikai és a villamos kialakítás, mások a korlátok és a lehetőségek.
Képletesen: egy lépésen belül szervóhoz hasonlatosan használható a léptetőmotor, de a hasonlóságnak kb. itt vége is szakad.
Szia. Elolvastam az általad írt érvelést,és jogos,de én csak azt akartam elmagyarázni ami a kérdés volt,hogy mi tartja egy helyben a szervó motort amikor nem kell lépnie.
Értettem is, csak el akarta kerülni a látszatát annak, hogy a beszélgetésben egyenlőséget tegyünk az AC szervomotoros, és a léptetőmotoros szervóhajtás közé.
 Remélem elég közérthetően és zavarosan fogalmaztam, hogy a szabványban gondolkodók, és a rögzült rossz követői is bólogassanak! A hozzászólás módosítva: Jan 2, 2016
Sziasztok!
Készen lett nagyjából a kis lézer gépem még a lézer kapcsolgatást kell megoldani. egyébként teljesen jól működik itt egy kis rövid videó a működéséről: Bővebben: Link Üdv Peti!
Tennél fel képet a kész gépről ? Ez már nem az a gép amit először láttunk ? A tengelyek beállítása sikerült a végén ? Mekkora lézer van rajta ?
A hozzászólás módosítva: Jan 3, 2016
Igen, ez az a gép amit már korábban feltettem igen sikerült és szerintem egész jól működik. Vagy tévedek? Bővebben: Link a linken lévő!
A kék csipesz zavarta meg a szemem azt hittem a gép alkatrésze , és a képen ezt nem láttam azért gondoltam hogy átépítetted . A lézeredről tudsz linket adni ?
A hozzászólás módosítva: Jan 3, 2016
Jaa nem csak az fogja a papírt hogy ne mozduljon el egy kisebb fuvallatól.
Sziasztok!
Szeretném meg csinálni hogy kapcsolgassa a lézert az arduino elméletileg meg gyakorlatilag is a 12-es láb az viszonyt olyan problémám lenne hogy valahogy nem jó ha tranzisztor-t rakok oda a led halványan világít a lézer meg semennyire ez mitől lehet?
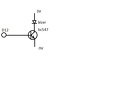
Sok oka lehet. Egy kis rajzot mellékelhetnél, mit hova kötöttél. Milyen tranzisztorról van szó, stb.
Hát így Móricka rajz alapján így.
Az ellenállás a tranzisztor bázisa és a D12 között mekkora? Mekkora a lézer árama? Miért nem használsz inkább MOSFET-et?
10Kohm próbáltam vele is nélküle is de ugyan az az eredmény. Kb. 100mA.
Nélküle is?! Az nagyon rossz ötlet volt. Akkor rövidre zárod a D12 lábat, ami simán kinyírhatja az Arduino-d.
A tranzisztor választásod teljesen rossz, nem jó ötlet max terhelésen járatni a tranyót. A 10k ellenállás is problémás, túl kicsi a bázisáram ezért a Vce 100mA-nál lehet vagy 15-20V (neked ugye 3V van összesen) magyarán nem tud 100mA átmenni a tranyón (a töredéke legfeljebb). Ide N-MOSFET kéne. Gyakorlatilag nincs feszültség esés a tranyón (Rdson legyen kicsi!). Ez 3V tápfesznél amúgy is fontos lehet (kék lézer, mennyi a Vf-ed?). Mivel feszvezérelt egy 10k ellenállás tökéletes a gate és a D12 közé. Az Ids jópár amper is lehet.
IRF630 esetleg jó lenne? Jahh értem már akkor ezért is világít a led halványan. rds=0.400Ω.
Logikai fet kell , mert az 5v gate feszültség g-s fesz nagyon nem elég az irf630 nak (ő 20v ot kér )nézd meg az adatlapját .
A hozzászólás módosítva: Jan 4, 2016
Ha tényleg csak 100mA a lézered árama, akkor egyelőre megteszi (40mV esés még nem a világ vége és ugye 5V-on megy az arduino?). Ha később nagyobb lézert akarsz használni, akkor viszont cserélni kell egy kisebb Rdson-os darabra.
Ha viszont csak most akarsz venni és nincs ilyened otthon, akkor pl. a IRLZ24N sokkal jobb választás. Módosítva: természetesen nem csak 40mV lesz az esés, ha csak 5V-al van vezérelve (az 10V-ra vonatkozik). A hozzászólás módosítva: Jan 4, 2016
Vgs(treshold): min 2V max 4V, ezért kérdeztem, hogy 5V-os az arduino-ja.
A hozzászólás módosítva: Jan 4, 2016
Én a hestore -ből letöltött adatlapot néztem az 20v ot ír ....
|
Bejelentkezés
Hirdetés |