Fórum témák
» Több friss téma |
Fórum » Robotika kezdőknek
Kicsit visszatérve a Laucnhpades robotra, az enyémnek valahogy a vonalkövetés nem igazán az erőssége. Pl. elindul, majd amikor a bal szenzor a vonal fölé ér, akkor leáll a bal oldali oldali motor hogy korrigáljon (tehát rendesen követi a programot), így előbb utóbb a jobb szenzor kerül a vonal fölé, mire azonban elindulna a leállt bal oldali kerék már le is száguldott a vonalról. Ha leveszem annyira a motorsebességet hogy még éppen el tudjon indulni, akkor már egy egyenes vonalon képes cikkcakkban végigmenni, de a kanyarodás már problémát okoz.
Nah sikerült kicsit finomhangolni, így már képes a kanyarodásra is. Kicsit lomha de legalább az enyém.

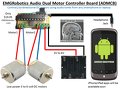
Sziasztok találtam ezt a képsort . A vezérlő elektronika részét hogy lehetne meg csinálni mert ilyen anyagokat nem találok sehol se ami a képen van . Valami más milyet össze lehetne e hozni ?
Ezek vannak benne : m430g2553 lbi836 2qn0 A hozzászólás módosítva: Feb 12, 2014
Ezt kb egy DTMF dekóderrel is meg lehet oldani szerintem! A DTMF 16 féle állapotot tud megkülönböztetni, ez két motor vezérléséhez több mint elegendő! Bármilyen telefonnal össze tudod kötni, egyszerűen a tárcsázó gombokat kell nyomkodni. Pl 1-es gomb bal motor előre, 2-es gomb mindkét motor előre, 3-as gomb jobb motor előre.. A DTMF dekóder meg egyszerű kapcsoló jeleket ad ki magából amikor a gombot megnyomtad. Csak egy tranzisztoros fokozat kell mögé, hogy a motorokat ki is bírja hajtani.
Értelek. Mondjuk ha ezt megépítem a ledek helyére dc motort teszek és a ledek előtt az ellenállásokat kiveszem akkor működne a dolog ?
Majdnem. A ledek akár maradhatnak is. A led és az ellenállás közé kösd be ezen a rajzon szereplő vezérlő bemeneteket!
Így egy gombnyomásra elindul a motor egyik irányba, másik gombra másik irányba (pl. 1-es 7-es gomb). Nyilván ez neked kétszer kell, mert két motorod van (3-as, és 9-es gomb). Most már tudod a két motort külön külön vezérelni. Ha egyszerre is akarod (naná!), akkor a 2-es és 8-as gombokra rákötöd egyszerre mindkét motor irányvezetékeit, de egy-egy diódán keresztül hogy ne legyen visszahatás. Mielőtt nekikezdesz, azért rajzold le az egészet, hogy biztos legyél a dolgodban!  Szerk: Most nézem, hogy mt8870 bináris kimenet ad, ezt előbb dekódolni kell, pl egy 74154-gyel! Ez egy demultiplexer, aminek a címvezetékeire kötöd a ledeket, ő pedig egyetlen kivezetést tesz aktívvá. Lényeg, hogy így már azt csinálja amit szeretnél. A hozzászólás módosítva: Feb 13, 2014
Még annyi, hogy a 74154 kimenetei és a tranzisztorok bázisa közé tegyél egy-egy 330 ohmos ellenállást, hogy ne terhelje le az ic kimenetét! Hű, most már tényleg rajzold le
Lesz vele meló
Igazából egy androidos telefonra lesz rá kötve és annak az adottságait fogja használni . Az elképzelés az hogy a telefonra jack dugón rá kötve egy bizonyos herczű hangot bizonyos ideg ki ad és úgy vezérli a motort . Esetleg van ilyen aki már ezt így meg csinálta ?
Mivel elkészült a Launchpades robotom ezért már a fejlesztgetésén gondolkodok. A problémám az hogy a motor leálláskor még akkora lendülettel rendelkezik hogy a kerék még tesz egy fél-háromnegyed fordulatot ami sajnos nagyobb sebességeknél azt eredményezi hogy még azelőtt lefordul a vonalról hogy megállna. Ezért arra gondoltam hogy 0 pwm helyett rövid (100-200 ms) idegi 80-100%-ot kellene hogy kapjon a motor fordított polaritással így az gyorsan lefékeződik.
Van erre valami jó ötlet hogy hogy kellene leprogramozni?
Ha nem rögtöni megállás a cél, akkor fokozatosan vedd le a kitöltést és megoldottad a problémát. Végig tudja követni a vonalat.
Ha DC motor, akkor inkább a vezérlőhíd alsó (vagy felső) felének rövidre zárását ajánlom, mint a fordított polaritást.
MIndkettő alkalmazható megoldás. De a rövidzár egy kicsit kíméletesebb mint a hátra gáz. ezért én is azt javaslom. Ha az is kevés, akkor ajánlom a hátrafelé gáz adását.
#KTobi: Ez tényleg jó ötlet, nem hiszem el hogy nekem nem jutott eszembe.
#borvendeg: Szintén jó felvetés. Ha jól értem akkor a dc motor leálláskor generátor és ha rövidre zárom akkor saját magát fékezi? Úgy nézem viszont hogy az L293D-nél ezt nem lehet megtenni, mert csak két input lábbal lehet vezérelni. Ami a valóságban csak 1 mert a másik az inverterre van kötve (amit egyébként nagyon jópofa megoldásnak tartok).
Sziasztok,
tudnátok olyan boltot mondani, ahol kisebb méretű szemes láncot? Hozzá olyan fogaskerekeket ami már 3 mm-s tengelyre illeszthető. Keresnék még olyan kisméretű csavarokat is mint, ami például a szervókhoz van, amivel a mozgató karokat lehet ráerősíteni. Segítségeteket előre is köszönöm!!!
Megcsináltam a Launchpad robotot PID-del
 Bővebben: Link Talán nem a legsimább a járása, de fényévekkel jobb mint korábban.
Üdv!
Arduinoval szeretnék szervo-motorokat vezérelni. Az arduino honlapján levő legegyszerűbb példával el is kezdtem a dolgot, de olyan problémám van, hogy amikor a motor beáll az adott pozícióba, akkor elkezd remegni. Külföldi fórumokon olyat találtam, hogy külső tápról vezéreljem, de akkor is ugyanezt csinálja. Főleg 0 és 180 fokos értékek környékén van ez. Van erre valami megoldás? A válaszokat előre is köszönöm!
Ha a vezérlőjel stabil, szkópon ellenőrizendő, akkor kuka a szervó. A digitálisak valamiért érzékenyebbek, az olcsó kínaiak jobban bírják.
Ha valaki tud rá megoldást, szívesen hallom egy nem épp olcsó digitális, fém fogaskerekes szervómra jött rá a remeghetnék.
Üdv mindenkinek!
Ma botlottam bele Ebbe a videóba. Érdekelne, hogy milyen érzékelővel lehet megoldva a mozgás követés. Én valami gyorsulásmérőre tippelek de nem biztos, szerintetek mi lehet?
Valószínűsítem én is, hogy az lesz. Mindenesetre elég lomha jószág, van még mit reszelni rajta..
Azt én is néztem, hogy kicsit lassan reagál.
Ezek a szenzorok általában ilyen lassúak (hosszú mérési ciklus) vagy létezik gyors verzió is? Hol érdemes beszerezni ilyen szenzort és milyet?
Inkább a program lehet rosszul megírva. Gyorsulásérzékelővel önstabilizáló fényképezőállványt is lehet csinálni, meg egyensúlyozó robotot.. A beszerzésével nem tudok segíteni, mert nem használtam még ilyet. Gondolom jár ide még olyan aki igen
Amúgy én a tinydeal comon szoktam mostanában nézelődni, elég olcsón vannak dolgok.
Szerintem a szoftver miatt ilyen lassú, vagy csak a vezeték nélküli kommunikáció miatt, de azt nyíltan merem állítani, hogy a gyorsulásmérő az elég gyorsan reagál mivel volt már dolgom vele, emlékeim szerint néhány ms alatt de az adatlapja mindent megmond. Én ezt használtam: ADXL345, ez egy három tengelyes és I2C-n kommunikál a külvilággal. Persze lehet hogy nem gyorsulásmérő, hanem giroszkóp van benne, azzal is meg lehet oldani, ilyennel is volt dolgom (ITG-3200), ez is I2C-n kommunikál, s hogy pontosítsak a kettő egy lapkán volt (9DoF IMU) így a két szenzor által mért adatokat egy Kálmán szűrővel kombinálva akár még pontos dőlésszöget is mérhetsz
En egy Freescale MMA7260QT IC-t probalgattam:
Freescale MMA7260QT Ott erzesre nehany tized masodperc volt a keslekedes, de ez lehet hogy az adatfeldolgozas es abrazolas miatt jelentkezett (a mert adatokat soros porton kuldtem a PC-n futo Processing programnak, ami a megjelenitest vegezte).
Pont most találtam meg a cikkedet
.Hol lehet beszerezni az általad használt szenzort?
Azt hiszem hogy az MMA7260QT mar nem gyartjak, elavult. Barmilyen gyorsulasmero megteszi, aminek a merestartomanya es az erzekelesi tengelyek szama a neked megfelelo alkalmazashoz passzol. Ha jol emlekszem, akkor a Sparkfun-tol rendeltem.
Egyelőre nincs konkrét cél vele csak érdekel a működése és ki akarom próbálni.
Később még jól jöhet ha van tapasztalat ilyen eszközzel.
Üdv. Ilyen modulra gondolsz?
Tudsz esetleg mintakódot mutatni? |
Bejelentkezés
Hirdetés |