Fórum témák
» Több friss téma |
Köszönöm szépen ez sokat segített.
Minden szervo operating voltage értéke 6 V felett van - mert minden szervo alapbol 7,2V akkura ( vannak ujjabbak ami 2S-re mennek - ami kb12V) van méretezve, de ennek semmi köze a bemeneti impulzusokhoz.
Azok a vevökre vannak méretezve, amik valamikor 3 darab AA elemröl mentek ( azaz 4,5V), manapság BEC-röl, ami a föakkubol csinál 5 V körüli tápot a vevöknek, ezért ebböl sem jöhet ki több ki mint 5 V-s impulzus. ( belül sokszor TTL áramkör van) A szervo bemenete ( meg már többször leirtam - el is olvashatnád) egy szintkomparátor és csakis az impulzusok fel és lemeneti élét méri. ( idözités) Igy: Bővebben: Link Láthatod, hogy a szintröl még emlitést sem tesznek, mert nem is kell. A hozzászólás módosítva: Júl 24, 2015
Mert te is félremagyarázod a dolgokat, amikor az operating voltage-t hozod elö, mi meg már napok ota az impulzus bemenetröl beszélgetünk. A kettö meg nem ugyanaz.
Javitok: természetesen 3S adja 12V-t
Bocs.
Sajnos erről a szervoról sincs normális adatlap, mint általában a szervókról. Ha oszciloszkóppal megnéznéd a vevőd kimenetét, akkor valami olyasmiket látnál, mint az alábbi linken:
Bővebben: Link A vezérlő jel szintjéről olvashatod, hogy jellemzően 3V-os. Ezek alapján fölösleges a 6V-os jelillesztés. A hozzászólás módosítva: Júl 8, 2015
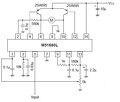
1 db NPN tranzisztorral is megoldható a szintillesztés, de az okozhat bizonytalan működést. A lenti rajzon látható, hogy a vezérlőimpulzusok magas szintjét az R2 ellenállásnak "kell előállítania", az húzza fel a szervó bemenetét magas szintre, ha a tranzisztorod lezárt. Ez azért okozhat így bizonytalan működést, mert ha a szervó bemenetét esetleg egy kondenzátorral zavarszűrte a gyártó, akkor máris van egy soros RC tagod, ami miatt az impulzus felfutó éle nem lessz eléggé meredek, és mivel ms-os időzítésekről van szó, pár 100us is komoly eltérést okoz. Ez egy darab NPN tranzisztorral úgy oldható meg, hogy R2-t kis értékűre választod, de mivel az idő 90%-ban a tranzisztorod nyitva van, így a kis értékű R2 feleslegesen nagy fogyasztást okoz, ami akkus táplálásnál nem célszerű. Ami a szervódat illeti biztosan van vele valami gond, nekem ugyanilyen szervó van az UAZ kormányzásában, és a vevőm egy külön 1 cellás Li-Po-ról megy, a szervó pedig a 2 cellás akkuról, amiről a motor is, és tökéletesen működik. Ahogy Massawa is írja, a szervónak az impulzus szélessége számít, nem az amplitúdója. Nekem pl. a PIC-es szervóteszterem egy CR2032-es gombelemről megy, és teszteltem vele már 40 kilós szervót is, ami 3 celláról ment, és az is működött. Most volt szabadidőm, és rádugtam az UAZ kormányszervójára a szervóteszteremet, de a CR2032 helyett labortápról táplálva, a szervó természetesen továbbra is a 2 cellás lipo-ról kapta a tápot. A szervóteszter tápfeszültségét egészen 1,9V-ig tudtam csökkenteni, akkor még működött a szervó, 1,8V-nál kezdett el "zizegni", de még akkor is működött.
A hozzászólás módosítva: Júl 9, 2015
Az előző hozzászólásom második képén egy gyakori szervó kapcsolás látható, az IC datasheetje szerint a bemeneten egy NPN tranzisztor van, tehát elvileg már 700mV körüli feszültséget is magas szintnek lát az IC. Az újabb digitális szervókban mikrokontrollerek vannak, amik bemenete TTL jelszintekhez igazodik, ahol 2V már magsnak számít, ha Schmitt Triggeres bemenete van, akkor pedig már 1,6V is magasnak számít. Biztos vagyok benne, hogy a szervóddal van valami hiba, a Turnigy is kínai, és sajnos eléggé sok gyári hibás van köztük
 Nekem már volt olyan új szervóm, ami csak egyik irányba volt hajlandó forogni, és olyan is, ami egy bizonyos fokú elfordulás után kiakadt végállásba olyan szinten, hogy lefogazta saját magát. Előbbit szétszedve a panelról hiányzott egy tranzisztor, és így csak egyik irányba tudta forgatni a motort az elektronika, utóbbinál pedig hibás volt a potméter, minimális elfordulás után átment szakadásba. Nekem már volt olyan új szervóm, ami csak egyik irányba volt hajlandó forogni, és olyan is, ami egy bizonyos fokú elfordulás után kiakadt végállásba olyan szinten, hogy lefogazta saját magát. Előbbit szétszedve a panelról hiányzott egy tranzisztor, és így csak egyik irányba tudta forgatni a motort az elektronika, utóbbinál pedig hibás volt a potméter, minimális elfordulás után átment szakadásba. A hozzászólás módosítva: Júl 9, 2015
Sziasztok!
Valaki találkozott már olyan szervó vezérlő kapcsolással amelyik hőmérséklet változásra vezérli a szervót ? Egy 110-es műanyag Y csőben kellene a terelő lemezt szabályoznia úgy, hogy folyamatosan tartsa a beállított levegő hőmérsékletet. Az Y- egyik ágán +40,+60C fok hőmérsékletű levegő áramlik, a másik ágon akár -10C foktól +30C fokig változik a levegő hőmérséklete. A harmadik (kevert) ágon Pl. +27C fokos levegőt tart a terelő lemez pozicionálásával. Vagy! Kellett volna már egy olyan rajz is ami Pl. kettő darab, egymástól Kb. 10 méterre elhelyezett mikrofonok között és egyben előttük (zajongóra) mutatna a kis szervó. Folyamatosan követné a jobbra, balra mozgó zaj forrást. Ha valakinek lenne ötlete a témával kapcsolatban, vagy rajza, szívesen olvasnám, fogadnám. Előre is köszönöm! Üdv. Mindenkinek
A terelőlapát tengelyére tegyél egy potmétert, és egy DC motort áttétellel. A mért hőmérséklettel és a potméter állásával egyszerűen megoldható...
Köszönöm az ötletet foxi63!
Látok benne rációt de egyenlőre nem áll össze a kép a kapcsolás vonatkozásában. Mit is kezdjek kettő darab potméter és egy termisztor ellenállás értékeivel?  Eddigi próbálkozásaim egy szervó teszter kapcsolással volt amit "módosítgattam" egy kicsit, nem sok sikerrel. Ha lenne valami "sémád", nagyon meg köszönném! Üdv. Miki
Szia!
A szervo vezérlési protokoll alapvető digitális rendszerekhez van kitalálva. Lehet analóg elemekkel is próbálkozni, mondjuk 555-sel változó szélességű jelet előállítani a hőmérséklet függvényében, de szerintem nagyon kétséges a megfelelő eredmény. Mind a kettő felvetett problémád szerintem szabályzó köröket feltételez. Ha foglalkoztál valaha szabályozástechnikával, akkor tudod, hogy egy kellően gyors és pontos hőmérséklet szabályozóhoz legalább egy PI vagy PID szabályzó kell és a szabályozott jellemzőt kellő pontossággal és sávszélességgel kell érzékelni. Ezek alapján szerintem egy digitális szabályzót kellene készítened, aminek a kimeneti jele a szervo számára értelmezhető impulzusokat állítana elő. Nem feltétlenül kell hardvert csinálnod, például az Arduino alap panelek képesek lehetnek minimális kiegészítővel hőmérséklet szenzort fogadni, a szervo vezérlés sem probléma. A feladat nagyobb része a megfelelő szabályozástechnikai struktúra kialakítása, a szabályzó kör optimalizálása. Persze ehhez tudnod kell az Arduino-t programoznod. Azt a platformot érdemes választanod, amelyiket a legjobban ismered. A hozzászólás módosítva: Júl 24, 2015
Szia!
Egy műveleti erősítővel egyfajta kivonó áramkört kell készíteni, ahol a termisztor "feszültségét" és a pozícionáló potméter feszültségét kivonod egymásból, az eredmény a hibajel.Ezt felerősítve egy H hidas vezérléssel a lapátmozgító motorra adod. Így a motor nyitja/ zárja a forrólevegő útját.Ha nincs hiba a motor áll... Valami ilyesmi ami a mellékletben... Hasonló módon működik pl. napkövető elektronika. A hozzászólás módosítva: Júl 30, 2015
Sziasztok!
Rendeltem az Ebay-ről egy olcsó szervó motort. Hamar megérkezett, rákötöttem az arduino nanomra, a gyári sweep nevű program működtette is párszor oda-vissza, de aztán váratlanul lehalt a szervó. Jelen pillanatban annyit csinál, hogy a signal kábel bekötése nélkül tápfeszülszültséget adva megindul egy adott irányba, majd lelassítva megáll, majd tápfeszültség elvétele nélkül ugyanebben a pozícióban marad. Ha elveszem majd újra tápfeszültséget adok, ismételten az előző irányba tovább fordul egy meghatározott szöget. Ezt addig lehet folytatni, amíg a véghelyzetet eléri. A véghelyzetben egyhelyben erőlködik, gondolom a mechanikus túlfordulásgátló miatt nem tud továbbfordulni. Ahogy olvasgattam nagyjából egy műveleti erősítő és egy potenciométer a lelke a rendszernek, nem sok minden lehet a baja. A DC motor működik, mozog, de úgy tűnik a vezérléssel van gond, mert irányító jel nélkül is mozog, pedig nem kéne ha jól tudom. Valaki tudna esetleg segíteni, hogy mit érdemes megmérni/tesztelni és hogyan? Előre is köszönöm a segítséget! A hozzászólás módosítva: Aug 6, 2015
Ezekkel az olcso szervokkal vigyázni kell, mert könnyen tönkre mennek. Meg kellene mérned milyen jelet adtál rá. Most nagyon ugy néz ki, hogy tönkre ment a bemenet (DC visszacsatolás).
Ha van szkopod mérd meg mi ment a szervoba.
Semmi rendellenes jelet sem adtam rá. A gyári arduino Sweep programot futtattam. Egyébként szétszedtem és a motor 16 lábú vezérlő IC-je két lábának a forrasztása összeér, szerintem ok nélkül. azt gondolom, hogy ez lehet a hiba oka. Valami K4626 vagy ilyesmi van a chipre írva, csak most fejből nem emlékszem rá. Tegnap este nem sok minden találtam róla, csak képet, spec sheetet nem. Így nem tudom mire szolgál az a két láb sajnos. Egy wikipédiára hajazó weboldalon egy nagyjából 10 vezérlőt tartalmazó felsorolásban megtaláltam, a Motorola 33030-al kezdték a felsorolást, de most hirtelen nem találom.
Egy 2A-es 12V-os tápot 7805-ös IC-vel (+kondenzátorok) stabilizálva.
Az lehet, hogy nem lesz elég, ezek a szervok amikor mozognak 1,5-2 A is huznak ( akkukra lettek tervezve amik belsö ellenállása igen kicsi).
Én 12V 6A-s tápot használok, és egy kapcsitáppal (10A nyolc szervonak) csökkentem 7,5V-ra
Köszi a tanácsot, kukázok otthon egy számítógép tápot, abban úgyis van elég kraft.
A terelő lapátnak teljesen el kell zárni az egyik ágat? Szerintem ez a legnehezebb kérdés.
A "set" szerintem a következő hőellenállás + arduino + servó vagy dc motor áttétellel (erősebb a légáramláshoz) + poti a beállításhoz.
A servóban a kis poti mehet tönkre. Többször előfordul.
PIC-ben a hardveres PWM részt kell használnod
SoftwareServo::refresh(); nem maradt ki a végéről?
A0-on a poti. servó D13-on (nem szerncsés, mert azon lehet egy piros led) A program először a potival beállított értékre vezérli a szervót. vár 100 ms-ot majd balra, vár 100 ms-t, majd jobbra, vár 100 ms-t, majd balra kicsit visszább, vár100ms-t röviden
Szeretnék pár tapasztalatot megosztani. (Tanuljatok a példámból
 ) )Szevó hibák: Gyárilag sajnos tényleg hibás lehet a szervó. Általában az egyik tranyó teljesen rossz. A szervóban lévő poti kontakt hibás lehet (ez minden elképzelhető hibát tud csinálni). Tervezési hibák: Kerberosz1-nek kell igazat adnom a "szintillesztéssel" kapcsolatban. Alul tervezet tápegység, vezeték vagy hűtés is sok hibát eredményez. Jut szembe arduino 5V. igen USB-n. Lábanként 40 mA. Elfogyhat az 500mA az usb-n. EZÉRT külső tápot kell használni, mivel a panelon van feszstab ezért 6,25V-nál nagyobb kell. 1000mA sem árt. 5V-os szervót bírja az arduino tápja? Csak terhelés nélkül! terhelésnél meg kell nézni , hogy milyen feszstab van rajta. Kivitelezési hibák: A tápfeszültség stabilitása nagyon fontos + a vezetékek vastagságát is túl kell méretezni az INDULÁSI áramhoz. Különösen a GND-t. (+kontakt hibák ) Programozási hibák: a mikroprocival megvalósított vezérléseknél a hardveres PWM-et kell használni! szoftveres időzítések csak tesztre jók. A PWM-nek adott szám megfelelő formátumú? 1023 fok jó lehet? Nézzük meg a leírást!!! A PWM-et beállítottuk akkor az megy magától NEM kell ciklusonként újra állítani!!! Az I/O lábak álltatában open collektor "jellegűek", tehát vagy a beépített felhúzó ellenállást "kapcsoljuk" be vagy külső ellenállást használunk. Oscilloszkóp használata sokat segít. nem csak a jelek nagysága és ideje számít, de a formájából sok mindent meg lehet állapítani. ( túllövések! ) Remélem tudtam segíteni.
Sziasztok!
Egy ilyen szervó motorral mekkora minimális RPM érhető el? Még nem volt szerencsém ilyen motorokhoz, de egy nagyon lassú forgásra lenne szükségem (~3-5 RPM) pozicionálással. Tehát be kellene tudnom állítani pl. 5,5 fordulatot mindkét irányba. Vagy encoderes motor legyen? De abból még nem találtam nagy áttételűt olcsón.
A léptetőmotor nem lenne jó? Vagy lépésmentes sima forgás kell?
Igen, sima forgás kellene. Egy 3000:1-es áttételű motort kellene kiváltanom, mert arra nem lehet szerelni encodert csak elég körülményesen.
A hozzászólás módosítva: Szept 24, 2015
A szervo neked nem fog magától körbeforogni, valoban jobb lerne egy sima áttételes motor ( van egy sereg az idevágo forrásokban).
Akkor jó. Mondom még nem játszottam ilyennel.
Akkor a 360 fokosak is (mint amit linkeltem is) csak oda-vissza tudnak járni, csak itt 360 fokban és nem 270-ben?
Szerintem ilyen lassú forgáshoz léptetőmotor lenne jó, az áttétel úgyis megnövelné a lépésszámot (pl. hasonló megoldás).
|
Bejelentkezés
Hirdetés |