Fórum témák
» Több friss téma |
Ha esteleg nemtudná letölteni , előfordulhat nem?
rset, táp + - syn azzal ne foglalkozz , lépés, irány
full, half stb de igen olyan egyszerü 
lematradt
a resetre home állapotra teszi a motort, egy kiindulási pozicióba.de innen kezdve bátran játszadozhatsz vele a potival a motor tartóáramát lehet beállitani. valahol,irja a képletet , de most nemakarok hülyeséget írni.
Nem kicsit off, de hogy tisztán láss: ha csatolsz valamit, a HE szerverére töltöd fel. Ha linkelsz, külső oldalra mutatsz vele. Ha megszűnik a külső oldal, halott lesz a link. Ha megszűnik a HE szerver, nem tudod letölteni. De akkor nem is látod, be se tudsz lépni. Egyébként letölthető. A HE pedig örök.
Ezért maradt meg a link helyett a file (na meg azért, mert jó kicsi).
Ok értem no hiába a rossz szokásom, a biztonsági megoldásaok alkalmazás kényszre
) Bocsicsak egy ez vagy azt fogom alkalmazni
Köszönöm a segítséget, megpróbálom megmocorgatni a motoromat.
Probalkozott mar valaki servo motrokat valami egyszerubb PWM al meghajtani?A lepeseket optokapukkal figyelve szabalyozni a lepeseket.
Most próbálkozom , az elektronika működik mostmár csak a mechnikára kell rászerelni a jeladót. Lineáris jeladót használok. Egyébként egy ba6209 -t használok, a motor meghajtásra (ehez). szóval a házasítás még hátra van.
Építettem egy áramgenerátort pwm üzeműt.Egyenlőre 15V-ról működik 10 és 0.3 Ohm között 0.02A az ingadozás.Még hátra van a 60V-os teszt. a végeredmény 0.4-3A beállítható szabályzás, vezérelhető a beállított áram 65% -on és 200%-on való tartása. (pihenőállapot, és kéttekercses üzemmód). Amikor a motor féllépéses üzemben van, akkor vezérelten megduplázza az áramot amikor 2 tekercs dolgozik. Ehhez kell már egy pic program. Ez is kész, pic16F84a vezérli.Azért írom meg, hátha kell valakinek ilyen rajz. Azért nem közlök még le rajzot, mert még változik, de hamarosan meglesz.Tulajdonképp nem tudom egyáltalán van-e igény rá...
sziasztok
Az lenne a kérdésem, hogy valaki összeirhatná nekem hogy mik kellenek a 3 motoros cnc hez, elejétől elolvastam a topicot, csak már belekeveredtem hogy mi jó és mi nem jó! Minden kellene kivéve a pc és a mechanika. 1 komplett működőképes elektronika!!! Amúgy bocs ha hülyeségeket is írtam, de nem nagyon értek hozzá, azért kérem az egészet komplettba, ha valakinek megvan. és ha lehet akkor sematikus rajz nyákterv beültetési rajz mindent kérnék! Előre is köszönöm Helló
Sziasztok!
Készülget a motorvezérlő.A tesztelésben egy 1.35A 3.8V-os printermotor vett részt. A meghajtás 40V tápfeszről ment és az ármfelvétel nem változott még 1s-os lépéseknél sem.(a 0.3sec pihentető áram nem volt bekapcsolva). A pic vezérli a tartóáram bekapcsolását, ha 0.4 sec -nél több a várakozás, akkor leveszi 65%-ra az áramot. A pwm IC(494) olyan üzemmódban dolgozik, hogy A söntellenálláson figyeli az átlagáramot, és ennek megfelelően szabályozza a motor feszültségét. Később felteszem a panelrajzot is. Meg a pic programját is.Jelenleg a próbapanelnél egyetlen fet sincs hűtve, és nem is langyosodnak.(1A áram) A jelfeldolgozás 6.5uSec tehát kb 150kHz sebességet képes feldolgozni.Jumperrel szabályozható normál lépés, normállépés 2 tekercses, és féllépéses üzemmód.
Érdeklődnék, hogy ismer-e valaki egy impulzusszámláló megoldást, amivel a motorra adott impulzusokat meg tudom számolni, netalán az inkrementumot beírva, mm-ben kiirná az elmozdulást?
Ó IGEN! Köszi, Ugyan, már-már túl jó ez az én esetemben, mert 6MHz azért nem kell, meg gyorsulásmérés, mivel csupán léptetőmotorjaim vannak, de jó tudni hogy van ilyen. Az én elképzelésem, egy kisebb, LCD-s változat lenne, neki is kezdtem, de egy 16-os PIC lassú lenne a feladathoz. Pláne a három tengelyre egyszerre. Hát istenem, legyen tengelyenként, magasabb órajellel és 3LCD? Végül is, működhet.... (?)
Sziasztok!
Én mindent meg tudok már oldani, csak mikrovezérlővel szeretném megoldani a STEP/DIR jelek feldolgozását. Valaki tudna esetleg mintaprogramot, vagy algoritmikai segítséget küldeni a témával kapcsolatban. Ahol találtam csak a hex. fájlokat mellékelik, így nem tudok rájönni belőle az algoritmusra?! A pic programozással nincs problémám!
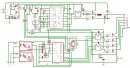
A fentebb rajzolt áramkörhöz a forrás.
A hex és az asm forrásfájl.pic16f84a. Jumperrel választható lépéstípus, tartóáramra való visszakapcsolás, féllépésnél dupla áram engedélyezés a tápfelé.. max 150KHz step-dir jelfeldolgozás. saját progi , remélem segít.
Köszönöm a minta programot!
Az a probléma vele, hogy te is hozzám hasonlóan itt-ott, kommentezed a programjaid és így nem igazán derül ki sokminden belőle. Mióta megszívtam egy-két programommal amit megírtam, utána pár hónap múlva módosítani kellett volna és fogalmam se volt mit írtam előtte Ezért javaslom + én is használom, hogy erősen kommentezni kell a programokat. Ha esetleg készítettél folyamatábrát azt is elküldenéd? Egyébként jól néz ki a program! Köszönöm! Ui.: A kapcsolási rajzot rendesen megbonyolítottad Hirtelen nem is értem a működését...
Hali!
Nincs megbonyolítva.A 2 db mc33151 fetmeghajtó IC azért van, holy szinte bármilyen fet használható legyen. a PIC 20mA terhelhetőségével, csak hozzávaló(TTL) szinten bekapcsoló fetet képes meghajtani. A PWM oldalon pedig a 60V miatt muszály alsó és felső oldali fet, elég lenne 1 db fet, de akkor kellene a 60V mellé mégegy 15V-os segédtápegység.Az ir 2111 megoldja a problémát,a pwm jelet ami 1-99% mehet, meghajtótrafóval nem tudtam korrektül meghajtani.Tehát az ir2111 biztosítja a két fet közötti holtidőt is (nehogy összezárjon a két fet)gyakorlatilag olyan ütemben állítja elő a négyszögjelet, ami a stepmotor áramához kell.Az alsó fet amikor kinyit, akkor a diódán keresztül feltölti a kondit, és az pedig már ellátja fesszel a felsőoldali meghajtását fetnek.A folytótekercs kisimítja, gyakorlatilag aPC trafóból kitermelt folytó is jó, nem kritikus.Lehet egyszerűbb kapcsolást is csinálni, de igy kapcsolási veszteségek elhanyagolhatóak, és nagyobb fordulaton is ugyanolyan erős marad a motor.Főleg ez a lényeg.Amikor pedig nem kap a motor a PC-től vezérlőjelet, akkor csak tartania kell a pozíciót, ezért a pic ezt az időt "számolja" és bekapcsolja a 60% áramot.Mihelyt a step jel megérkezik, azonnal megszakítást generál, és visszaállítja a 100 % áramot, valamit lép. Amikor féllépéses üzemmódban van, akkor 2db tekercsnek kell áram, tehát a pic bekapcsolja a 200% os áramot. Ha ebben az állásban eléri a lépetési pihenő időt, akkor is beáll a dupla áram 60%-a.Szerinten ezeket a szolgáltatásokat nemigen lehet egyszerűbben megoldani.A PC dolga annyi, hogy step és dir jeleket adjon. Jelen kapcsolásban nem kell előtét ellenállásokon 20-30W-o elfüstölni, hogy javuljon a magasabb fordulatszámon a nyomaték. A pic programról... A jumperrel (2 bit bemenet) választható a lépés típusa. A pic induláskor ezt megnézi, és a lépéstáblát ennek megfelelően válaszja ki. Ha a dir jel magas, akkor előrefele lépteti a számlálót(lépéshelyzet) ha nem akkor hátra. A step jel azonnali megszakítást vált ki, lép a motor, valamint nullázza az időzítőt, ami a tartóáramhoz van. A főprogram csak a tartóáramot kapcsoljabe.
Ehhez, amit korábban már belinkelt Kastler, nincs véletlen meg a PIC progija valakinek? Ha igen, akkor hogyan kérhetném el?
Én is vásároltam Magi Úrtól, de minden PIC-je code protectes, tehát féltve őrzi és csak megvásárolni lehet egy PIC-kel együtt szerintem!
Sejtettem, de köszi a választ.
Lehet, hogy jobb is, ha az ember maga írja, mert oda fejleszti, ahova akarja.
Sziasztok régóta nyomonkövetem ezt a forumot és ez alapján elkészítettem annó az első vezérlőmet de mivel nekem nem szakmám az elektronika "cnc programozó vok" ezért segítsgégeteket kérném !!!!!!!!!! összehoztam nagy nehezen a cenece féle kapcsolást de sajna azzal nem lehet az áramot szabájozni nincs benne pwm csak szimpla ellenálás és nagyobb motorokat rákötve lefüstölnek az irf 540-esek mi tegyek?

Szia!
Légyszi tegyél fel egy rajzot róla...
www.cenece.com elektronika részen mindent megtalálsz és köszi előre is
Szép szombat estét Uraim,
Végre volt időm egy kicsit léptetőmotoros CNC gépem vezérlésével foglalkozni. Egy olyan vezérlésen dolgozom, mely a párhuzamos portról veszi a step-dir jeleket, egyenként a 3 motorra, de ugyan akkor számítógépes csatlakozás nélkül képes alapvető feladatokra, amit a hozzá illesztett billentyűzeten adok be. Ezek lineáris mozgások, egyszerre csak egy motorral, és egy előre beadott távot, szóval semmi komplikált. A lényegre koncentrálva sürítem a mondanivalóm, 24V-os unipoláris léptetőmotorjaim vannak, melyeket direktben 4db IRFZ44-el hajtok meg, féllépéses üzemmódban (ez 400 féllépés fordulatonként), egy PIC18F4520-ról. A névleges feszültségről, a nyomaték megtartásáig úgy 180ford/percig tudok elmenni, ami nem túl sok. E felett a motor erősen ránt, nincs nyomatéka, és lépést veszt. Erre megoldást a hardware-es PWM jelentene. Microstepping üzemmódnak is hívják. A jelet a PIC állítaná elő, de itt abba a problémába ütközök, hogy egy nagyobb PIC-en is csak 4 kimenet van. Ez egy motorra elég lenne, de nekem 3 van. Multiplexelni nem tudom, mert automata üzemmódban a párhuzamos portról vett step-dir jelet késleltetés nélkül továbbítom a FET-ek felé. Mit tanácsoltok, hogyan lehetne megvalósítani egy ilyen komplexabb PWM meghajtást úgy, hogy a kitűzött célok megmaradjanak (kézi/automata üzem). A PIC 40MHz-en jár, 10MIPS-el. Esetleg el kéne osztani a PWM jel előállítását 3 alvezérlőre, akár egy külön ilyen célIC-re? Ismer valaki quad hardwares PWM IC-t? szerk: Most jutott eszembe, van nékem egy Propeller Clockom a Parallaxtól, ez egy 8 magos processzor, ez úgymond ágyúval verébre, vagy nem túlzás? Mit mondanak a szakik hozzá? A programozás nem okoz gondot, maximum tovább tart mint a PIC-re C nyelven.
Szia cpumaster elég láma vagyok a témához . ez most komlett vezérlő? ha igen akkor mit bír mert érdekelne a dolog.köszi tomi
|
Bejelentkezés
Hirdetés |