Fórum témák
» Több friss téma |
Fórum » Propeller Clock
Igen! Pl a Homér
 Van erre valami publikus algoritmusod vagy leírásod, hogy a képet hogyan dekódolod? Van erre valami publikus algoritmusod vagy leírásod, hogy a képet hogyan dekódolod?
Szia! Bár nem ástam még magam bele az órakészítésbe, de számomra az tűnik kézenfekvőnek, hogy a képeket (pixeleket) nem derékszögű koordináta-rendszerben (x és y tengely) ábrázoljuk hanem polárkoordináta-rendszerben, ahol a szögelfordulás és a középpontól mért sugár adja meg a pixel helyét. A sugarad hossza az egy sorban lévő ledek számával mérhető, a szögelfordulás pedig az érzékeli ponthoz (hall elem/fototranzisztor/stb...) képest eltelt időből és a pillanatnyi fordulatszámból kiszámolható. Ennek maximális felbontását a hardverek sebessége határozza meg. Wikipédia cikk további tanulmányozásra. Az igaz, hogy a középponthoz közelebb "rövidebbek" a pixelek, míg a külső íven hosszabbak, de a forgómozgás miatt így célszerű ábrázolni. Némi programozói tudással egy x,y koordinátás kép könnyen átalakítható a Wiki-s cikkben található képletekkel.
A hozzászólás módosítva: Máj 24, 2014
Nekem nincs de adhatok pár ötletet kiindulásnak.
Címszavakban: -Trigonometria -Koordináta redszer -Képernyőmemória -Vektorgrafika Én kétféle módszert ismerek (lehet van több is), hogy miképpen lehet álló képet megjeleníteni. Az egyik egyszerű de korlátozott, csak állókép megjelenítésre használható (persze sok állókép kitehet egy mozgóképet). A másik módszer pedig az amit leginkább mindenhol használnak az a képernyőmemótia alkalmazása. Ez egy jó módszer csak egy függvényt kell írni ami a memória tartalmát kiteszi a "képernyőre", ezt fix időnként kell hívi mindentől függetlenül. Közben a program bármit "berakhat" a képernyőmemóriába az meg fog jelenni. Volt itt a fórumon már hozzászólásom amiben írtam erről bővebben, keress rá.
Köszönöm a segítségeteket, így már könnyebb lesz elindulni!
Egyébként miért nem veszed meg a kész terméket ami a videón van?
Ezen a fórumon többnyire utánépítésről van szó.Fejlesztők igen kevesen vannak. Persze nem lebeszélni akarlak de új vagy itt ebben a fórumban (számomra), és tapasztalatból tudom hogy az utánépítéssel is akadnak gondok bőveen,hát még egy új fejlesztéssel.Én végigjártam ezt az utat .....Amit te akarsz építeni ,hát nem tudom.....,Nem mondom ,hogy lehetetlen amatőr körülmények között de fel kell kötni a gatyát rendesen. És persze a zsebbe is bele kell nyúlni elég mélyre. Persze ezekől függetlenül várjuk a fejlesztésed eredményényét és sok sikert kívánok hozzá. Remélem megosztod velünk a tapasztalataidat.
Szia!
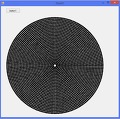
Kipróbáltam a polárkoordinátát, gyorsan lemodelleztem gépen, hogy hogyan működik. Csatolva az eredmény. Bár szerintem kissebb "led" mérettel kéne próbálkozni. MAjd még folytatom. Azért nem veszem meg, mert 960$  Szeretem a kihívásokat! Programozni is szeretek, PIC-re, Windowsra, Androidra. Ebben a projektben mindhárom megtalálható Nem mondom, hogy biztosan meg fogom csinálni, de elkezdem, meglátom mire jutok. Egyébként az anyagok már megvannak hozzá. WS2812B ledem van, ahoz a vezérlés már működik. dsPIC33EP256MC502 mikrokontrollerem van, ezzel gondoltam megvalósítani. 70Mips, 32k RAM talán elég lesz valamire. Bluetooth modulom szintén van már. Szóval lassan minden összeáll.
Kicsit több pöttyöt beállítottam, már sokkal szebb. Kiszámoltam kb mennyi képpont jön ki, ha egy 26"-os keréken 5mm-es led forog körbe, és az alapján csináltam meg. Elég sok képpont lett, bajban leszek a nagy adattal. Valami memóriát kell majd a PIC-en használnom, ezzel még bajban leszek.
A hozzászólás módosítva: Máj 25, 2014
Idézet: „Valami memóriát kell majd a PIC-en használnom, ezzel még bajban leszek.” Nem csak azzal leszel bajban hanem a MIPS-ekkel  , az én órámon 64 RGB led van és ez épp elég a 40 MIPS-nek.Ja és az csak egy rotor te pedig négyet akarsz!? , az én órámon 64 RGB led van és ez épp elég a 40 MIPS-nek.Ja és az csak egy rotor te pedig négyet akarsz!?Végülis mennyi ledet akarsz meghajtani?Számol ki 25hz-es kép megjelenítéshez mekkora adatmennyiséget kell kinyomnod másopercenként. A hozzászólás módosítva: Máj 25, 2014
Egy kérdés. Ide kell az RGB? Nem elég külön "rotoronként" egy-egy szín?
Na számolgattam kicsit, leírom, hátha elszámoltam valamit, és észreveszitek.
30km/h sebeségnél egy 26-os kerék 250ms alatt tesz meg egy fordulatot. Ha a legkülső íven számoljuk, akkor 5mm-es lednek 415 pontot kell rajzolnia a külső íven. Összesen 13280 pontból áll így a kép. Az elektronikán 4*32 led lenne. Egy lednek 3,75uS kell az adatbeíráshoz. Az összes ledet egyszerre hajtom meg, azaz 128*3,75uS + 50uS reset kód. ~220mS kell a 13280 képpontnak, ami még belefér a 250ms-es időbe. Két led között van ~600uS processzor időm. Jól gondolom?
Egy accelerometer vajon jó volna arra, hogy a kerék aktuális szögét monitorozzam? Ugyanis elég nagy a kerék, és folyton változik a sebessége egy fordulat alatt is. Egy hall senzor tuti kevés lenne.
Ez jó ötlet, és így "csak" három rotor kell.
Idézet: Reed relére gondoltam, elírtam „Egy hall senzor tuti kevés lenne.” Lehet hogy pont a hall szenzor lenne jó.
Jól számolad. De mi van ha pl 35km/h a sebesség?
Az a gondom hogy ha kb 220ms egy kép kirajzolása akkor hogy a bánatban lesz ebből 25 frame/sec ,hogy ne vibráljon a kép?Ez jó esetben is csak kb 4 frame/sec. Mi lesz 10km/h nál? A másik dolog ,hogy 32 leddel számolsz ami kb elég sz*r képet ad.nézz meg egy pl. icont felnagyítva A4 méretre. Hogy ez jólnézzzen ki szerintem legalább 128 Led kéne lapátonként. Még egy , ha már csak 32 led lesz akkor minek 415 részre osztani a kört? Férle ne értsd nem a 415-el van a baj. Csak hát a 32 led az trabant ,a 415 meg mercedes kategória. Valami jobb komromisszum kell. frames dologra: Talán valami propclock szerű rotort kéne forgatni a keréktől sokkal nagyobb sebességen. Valami áttétellel vagy motorral.Így álló helyzetben is lehetne kijelzés. A hozzászólás módosítva: Máj 25, 2014
Akár egy reed relé is megteszi(bringánál), nincs jelentősége a kontaktus sebességének mert az offset az állandó maradna.
Idézet: „Ugyanis elég nagy a kerék, és folyton változik a sebessége egy fordulat alatt is” Ezt fejetsd el. Köridőt kell mérni! Értelmetlen másképp csinálni.Csak feleslegesen bonyolítaná a programot a szögek mérése. A hozzászólás módosítva: Máj 25, 2014
Néz meg ezt a videót.Kb erre az eredményre lehet számítani a valóságban és a srác szerintm már itt is izzad a tekeréstől.
Bővebben: Link Idézet: „De mi van ha pl 35km/h a sebesség?” Leveszem két sugárra a kijelzést pl. Vagy két lábról hajtom a ledeket, így fele annyi idő lesz a rajzolás. Idézet: „Ez jó esetben is csak kb 4 frame/sec. Mi lesz 10km/h nál?” Nyílván 10km/h alatt nem lesz jó. De nem 4 frame/sec, mert egyszerre 4 sugárral rajzolok, szóval egy negyed kör alatt rajzolódik ki a kép. Idézet: „ha már csak 32 led lesz akkor minek 415 részre osztani a kört?” A 32 led az onnan jött, hogy a monkey light pro-n ennyi van. a 415 meg onnan, hogy ha a kerék 2075mm akor 415x fér el egymás mellett az 5mm-es led. Amit legelőször linkeltem képet, ott 32 pötty a sugár, azért annyira nem rossz az. Idézet: „frames dologra: Talán valami propclock szerű rotort kéne forgatni a keréktől sokkal nagyobb sebességen. Valami áttétellel vagy motorral.Így álló helyzetben is lehetne kijelzés.” Erre én is gondoltam. Régi görgős egér érzékelőjére pl. Idézet: „Néz meg ezt a videót.Kb erre az eredményre lehet számítani a valóságban és a srác szerintm már itt is izzad a tekeréstől. Bővebben: Link” Itt csak 3 sugár van. De a vidó tuti nem adja vissza, élőben lenne jó ezt megnézni. De egyébként nem vetem el azt sem, hogy 6 sugarat csinálok. Először egy sima egy sugarasat fogok szerintem csinálni ventilátorra, majd tapasztalatszerzés után már jobban át fogom látni. Az is lehet, hogy nagyobb sebeségű procira váltok, valami 140mips-esre. a pic32-es családot kipróbálnám szívesen. Egyébként sötétben nagyobb a szem "tehetetlensége", akkor talán kevesebb frame is elegendő mint 25. A hozzászólás módosítva: Máj 25, 2014
Emelett döntöttem a sebességmérésre: Bővebben: Link
Szögsebességet mér, abból már könnyen ki lehet számolni a sebességet. Már csak a 0 fokot kell detektálnom. De végül is azt is meg lehet vele oldani. Remélem jó lesz, de ha nem, másra is fel tudom még használni, elég jó árban is van A hozzászólás módosítva: Máj 31, 2014
Szia !
Én tavaly szórakozásból próbáltam egy hasonlót építeni, persze sokkal-sokkal egyszerűbbet. Csak 1 ága volt, 11 leddel, Hall elemes helyzetérzékeléssel, egy ATTiny2313-as IC-vel (1K sram) 12MHz órajellel, csak egy fix szöveget tudott megjeleníteni, 360 részre osztotta a kört. Hosszú záridejű fényképeken jól mutatott, de a valóságban szabad szemmel nem nagyon volt értékelhető a szöveg. Mellékelek néhány képet és egy videót is, azon jobban látszik miről beszélek. A videón kb. 2/sec a fordulatszám, ami a 2m-es kerületet figyelembe véve 14,4km/h-nak megfelelő sebességet jelent. A bike_prop_2.jpg 1,6s, a bike_prop_3.jpg 0,4s záridővel készült. Itt a video
Szia!
Köszi, hogy megosztottad velem az infót! És mit gondolsz, 4 ág elegendő lenne? Nincs kedved beszállni a projektembe?
Szia!
Nézegetem ezt a hozzászólásodat és nekem nem ezek az időzítések jönnek ki a LED adattáblájából. Ezek szerint 1 bit hossza 1,25us+-0,3us (az adatlapban +-600ns van, de az nem jó), tehát ha sikerül az alsó határra belőni a bit hosszát, akkor 0,95us adódik. Ebből 1 LED esetén 24 db-ot kell kiküldeni, ami 22,8us. Mivel 128 db LED lenne, így egy propeller álláshoz 2,918ms kell+50us=2,968ms. Ha a kört 415 részre osztod, akkor 1231,886ms (1,2s) kell ahhoz, hogy egy körre az összes 128 db LED-nek kiküldjed a biteket.
Teljesen igazad van, basszus én 1bittel számoltam, nem nyolcal
 Egyébként 1,25uS-re tudom belőni, mert SPI portal vezérlem, ahol két bit ad ki a lednél 1 bitet. Tehát 16bit felel meg a lednek 8 bitnek. Az már számomra is egyértelművé vált, hogy két SPI-vel kell hajtanom, de akkor még így is 796.8ms, ami elég sok  Valahogy a képpontok számát le kell redukáljam! Ha spirál alakban rajzolom ki az ábrát, akkor nem sűrűsödik a képpont a kör közepe felé, viszont azt még nem tudom, hogyan lehetne megvalósítani mikrokontroller oldalon, mert nem egymás alá kerülnek a sorokban a ledek. Egyébként már szimulációt írta rá, 3483 pont jött ki így, ami 104ms kb. A hozzászólás módosítva: Máj 31, 2014
Esetleg mind a négy ágnak saját kontrollert lehetne beépíteni, ekkor 1/4-re csökken az idő, mert csak 32 LED-et kell meghajtani.
Az ábrád szerint a kör közepéig be fog nyúlni a kijelző, ami miatt a belső 5-6 LED szinte egybe fog folyni. Talán jobb lenne ha csak egy körgyűrű lenne és képpont számot a legbelső LED-hez igazítanád. Én a helyedben nem a véglegesnek elképzelt verzióval kezdeném, hanem egy jól leegyszerűsített modellel, azon lehetne tanulmányozni a kritikus pontokat. Az a tapasztalatom, hogy akármilyen körültekintően próbálunk megtervezni valamit - amatőr, hobbi szinten - a valóságban kicsit másképpen működik. Amit a saját próbálkozásomról linkeltem az is ilyen első verzió, csak nem jutott egyelőre tovább.
Tegnap este elég fáradt voltam, és most vettem észre, hogy megvezettél
Idézet: „Mivel 128 db LED lenne, így egy propeller álláshoz 2,918ms kell+50us=2,968ms. Ha a kört 415 részre osztod, akkor 1231,886ms (1,2s) kell ahhoz, hogy egy körre az összes 128 db LED-nek kiküldjed a biteket.” Viszont csak 1/4-ed körrel kell számolni, mert egy ágnak csak negyed kört kell rajzolni, és úgy kijön a teljes kör. Tehát elég a ~420ms a teljes kör kirajzolásához! Idézet: „Én a helyedben nem a véglegesnek elképzelt verzióval kezdeném” Igen, erre én is gondoltam, előbb egy ventilátoron fogom kipróbálni egy ággal. Idézet: „Az ábrád szerint a kör közepéig be fog nyúlni a kijelző” Igen, erre is gondoltam, de a 32 led akkor is maradni fog, mert kb ennyi kell, hogy a kereket befedje majd(a tengely kivételével).
Negyed kör - teljes kör:
Ha a kerékpár kb 24km/h -vel megy és a kerék kerülete kb 2m, akkor 12000 fordulat / óra, azaz 200 fordulat / perc azaz 3.33 fordulat / sec. Ahhoz, hogy álló képet kapj, másodpercenként minimum 20 frissítés kell. Ezért mind a 4 ágnak ki kell rajzolnia a teljes képet és nagyon gyorsan kell tekerni... Ezekkel a paraméterekkel már 36 km/h sebességnél meglenne a 20 frissítés másodpercenként. |
Bejelentkezés
Hirdetés |