Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
milyen élességet?

24 millos fordulat! Az igen. Percenkent gondolod? A motorjaid ranezesre sima negyfazisu unipolaris motorok, de a fenykepek gyalazatosak. Annak az elesseget kerdezte Zoli_bácsi. Teged nem zavar, hogy totalisan eletlenek a kepek?
De, engem is zavar de sajnos a telóról amivel csináltam kimet a fókusz..
lehet én számoltam rosszul a 24 milcsit de az tuti hogy 400Mhz kellene 4 tekercsnek ami megegyezik egy léptetőmotorral de ez még odébb van.. most csak inkább a két motorral foglalkoznék.. pl ezzel itt: vezérlő szóval ez eddig okés hogy kell 2 ic látom mit hogy hova de az ic hová csatlakozik? Step clock dir? ezek mennek a nyomtatóportba? A hozzászólás módosítva: Márc 4, 2014
Idézet: Ezt az adatot honnan vetted? „de az tuti hogy 400Mhz kellene 4 tekercsnek” 
Sziasztok,
Már kaptam letolást a téma túlbonyolításáért, most a lehető legegyszerűbben nekifogok a dolognak  Hogyan alakíthatnám át ezt a linkelt, egyébként megépített és működő kapcsolást Hogyan alakíthatnám át ezt a linkelt, egyébként megépített és működő kapcsolást- akár egyik IC elhagyásával, helyette FET-ek alkalmazásával, - vagy a meglévő kapcsolás meghagyásával, és plusz FET-ek beépítésével, hogy a motor ne vegyen fel jelentős áramot állás közben? (Jelenleg 1-2A) Életet menthet Köszönöm! A hozzászólás módosítva: Márc 4, 2014
A képen látható motor életlen, háttér éles. A képet készítő készülék teljesen mindegy, az élességet mindig be kell állítani, ha erre lehetőség van.
A hozzászólás módosítva: Márc 4, 2014
Hali!
Először elhagyod az egyik IC-t, használsz helyette pl TB6600, vagy TB6560, majd elhagyod a másik IC-t is mert felesleges elég a TBxxxx.Legolcsóbban kijössz ebayról egy fenti IC-vel szerelt vezérlővel.
Köszönöm a válaszokat. Mivel eddig egy mikrokontroller adta volna az impulzusokat, hogy hány darab ugrás legyen, úgy döntöttem szabad lábak birtokában, hogy leprogramozom az egészet.
Annyit nem tudok csupán így elsőre, hogy egy ilyen formátumú feszültség adásnál a tekercsekre 1010 -> 1001 -> 0101 -> 0110 amikor 1010 -ból átmegyek 1001-be, akkor az első bitsorban az első biten (1) hagyjam fent a villanyt, vagy kapcsoljam le a harmadik bittel együtt a futás után, és újra bekapcsoljam a második bitsorban az elsőt a negyedikkel együtt? Vagy az első maradjon fent mindkét bitsor idejére, és a harmadik menjen le, a negyedik fel? Remélem nem kavartam nagyon össze.
Hali!
Nem teljesen világos mit akarsz procival csinálni, ha ezek az uln bementi bitjeit jelentik, ugyanott vagy mint előtte, ebbol nem lesz kisebb áram, ahhoz hogy a motor ne mozduljon kell neki folyamatosan tartóáram, a mozgáshoz meg üzemi áram vagyis egy áramgenerátor átkapcsolható tartó/üzemi értékkel. Szerintem... Esetleg csinálhat a motornak kétféle tápfeszt, mozgás alatt, az eredeti 12V, álláskor meg pl - mondok egy számot - 6V, step pulzusra egy újrainduló monoflop, ami 12V-ot kapcsol, ha nincs impulzus, a monoflop lejár, átvált 6V motor tápra... De én jobban javasolnám normális áramgenerátoros motorvezérlő chip használatát... A hozzászólás módosítva: Márc 5, 2014
Szia!
Igazából csak annyi érdekelt volna, hogy amikor a feszültségeket váltom a tekercseken, akkor ebből az első lépésből: 1010 1. tekercs van feszültség 2. tekercs nincs fesz 3. tekercs van fesz 4. tekercs nincs fesz ebbe a lépésbe áttérve:1001 1. tekercs van fesz 2. tekercs nincs fesz 3. tekercs nincs fesz 4. tekercs van fesz látható, hogy mindkét lépésben van áramellátása az első tekercsnek. Ekkor ez vajon azt jelenti, hogy mindkét lépésben folyamatosan legyen jelen a feszültség az első tekercsen, vagy amikor az első lépés véget ért és lekapcsolom a 3. tekercsről a villanyt, akkor kapcsoljam le az elsőről is? És majd a második lépésben kapcsolja be újra az első tekercs áramellátását a negyedikkel együtt? A hozzászólás módosítva: Márc 7, 2014
Hi!
A google csodára képes. Nézd ezt az oldalt: Bővebben: Link Nagyon jól van magyarázva, és szinezve. Üdv. A hozzászólás módosítva: Márc 7, 2014
Újból nekifutnék, most már több infóm van a motorról, hátha így hatékonyabb lesz a segítség (már ha lesz...)
A gyártó a Sonceboz, adatlapján ezeket a paramétereket találtam: Fázisok ellenállása:51 ohm Fázisok induktivitása: 32 mH Fázis áram felvétel: 233 mA Névleges teljesítmény 5.5W Fázis feszültség: 12V Lépések: 24 Lépés szöge: 15 fok Segítsetek abban, hogy milyen meghajtó áramkört (akár egyszerűen Arduinohoz kapcsolhatóra is gondoltam) igényel ez a motor! Előre is köszi!
Ha 12v 230mA terhelésre számolsz akkor elég egy uln2003 a motor és az arduinó közé
Sziasztok!
ez a motor vezérlő tartalmaz motorvédelmet? Valaki ismeri? Koszi Tamás A hozzászólás módosítva: Márc 12, 2014
Szia. Ez a motor vezérlés logikája, illetve ez az eszköz hardver-szoftver kapcsolat a PC és a motorvezérlő között. Ehhez ugye még kapcsolni kell egy motor végfokot, amiben benne lehet (attól függ milyen motorvezérlő áramkör) a motor védelem. De inkább a motortól kell védeni a vezérlőt, nem fordítva. A motorban ugyanis, mikor összeomlik a mágneses tér, egy igen nagyfeszültségű impulzus (EMF) keletkezik, ami veszélyes lehet a vezérlő elektronikára nézve.
A hozzászólás módosítva: Márc 12, 2014
köszönöm, akkor ehhez még kell építeni pl egy l297-298 alkotta végfokot?
Akár azt is lehet igen, vagy tosiba, vagy egyéb ic-vel szerelt végfokot. Én majd az MSD-nél teszem le a voksom.
Üdv mindenkinek !
Alap igényeknek szerintem megfelelő léptető motor vezérlő és forgás irányváltó .Így csináltam. Az alkatrészek a terhelésnek megfelelően változhatnak .Nem méretezett de működő kapcsolás!!!
Köszönöm,
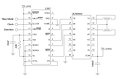
Rajzoltam egy vezérlést a fent említett ic-vel. Működhet így a csatolt rajz?
Tudja valaki igy kapásból a CD/DVD lejátszokban hány lépésü motorok vannak (szoktak lenni)?
Kösz.
Sziasztok!
Japan Servo ceg altal gyartott KH56JM2 tipusu leptetomotrokhoz tudna valaki driver kapcsolasi rajzot javasolni? Unipolaris. Datasheet: Bővebben: Link A hozzászólás módosítva: Márc 24, 2014
Üdv!
Március 16-i bejegyzésemben is találsz ha egyszerű kel. A hozzászólás módosítva: Márc 24, 2014
Sziasztok!
Ilyen rendszerő bipolárt milyen módon kell vezérelni? milyen sorrendbe kapcsoljam a tekercseket? Köszönöm!! |
Bejelentkezés
Hirdetés |