Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
Ezt majd még kikísérletezem, most épp az egyszerre 2 léptető motor párhuzamos vezérlésén agyalok és itt fölmerülnek bizonyos problémák.
Ugyebár 1-nél nincs gond, mert ciklus ismétlődik, lefut a 4 tekercs vezérlőjele, majd ujra. 2 motor esetén amíg az egyik vezérlése fut addig a másik áll, ami nem jó. Viszont, ha összefűzöm a 2 motor vezérlését:
(port A az egyik motor, Port B a másik) Ez így működik, de elég problémás áttekinthetőség szempontjából, ha meg még kritériumokat szabok (If) a motorok működésére, akkor meg már teljes káosz. Van-e valami ötleted ennek kiküszöbölésére? Vagy 1 motor/1 PIC a megoldás? Üdv
Esetleg a léptetést tedd szubrutinba és azt hívd meg, vagy használj motorvezérlő chippet annak csak egy lábát kell rángatni egy motor lépéshez.
(egyet meg az irányhoz, meg még párat tartani valamin, de az lehet permanens is.
Szia
Idézet: „használj motorvezérlő chippet annak csak egy lábát kell rángatni egy motor lépéshez” Step/dir Ic-re gondoltam én is (még nem próbáltam). Az L297-et találtam, ennek 1000 ft darabja, és akkor még nincs végfok, ennek árából veszek 3db 12F629-et. Ami tovább erősíti a több pic-es rendszert ha a motorok lépésszöge se stimmel ( tapasztalataim szerint egy 1,8 fokos motor kb 1ms időzítéssel forog a legsimábban, egy 7 fokos már 3 ms-alatt meg se mozdul) Üdv
A lépést te mondod meg a motorvezérlőnek, és egy normális motorvezérlőbe 3 A-es végfok is van, mikrosteppek, meg minden egyéb. TB6560-ra keress rá.
Nekem elsőre a motor/pic jutott eszembe, I2C kommunikációval irányítva. Az a baj hogy a 629 nemtud hardveres kommunikáációt :S Szóval a vezérlés az egy külön gond lenne még neked. Vagy szoftverből megoldod azt hogy tudd irányítani őket vagy egyszerűen egy analóg lábat használsz fel potival. Ez már megvalósítás kérdése. összesen hozzá még 4 darab tranzisztor/fet sem egy drágaság

Sziasztok! Van egy 8 vezetékes léptetőmotorom, amit eddig unipolárisként hajtottam, hogy 4 vezetéket a pozitívra kötöttem, a másik 4et egy ulm2003-mon keresztül egy atmega8ra, de túl gyenge a motor és a cikkben is azt írták, hogy 2szer akkora áramfogyasztás mellett több mint 2szeres lesz az ereje.
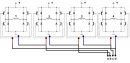
Jó lenne így az unipoláris-bipoláris átalakítás? (Csatolt kép) Én BD139-essel gondoltam, meg a PNP párjával (ami még nem is tudom, hogy melyik, de majd utána nézek) Előre is köszi a válaszokat!
Ezt nem igazán értem. Egy bipoláris motor meghajtásához 2 tekercsre van szükség. Azaz 4 vezetékesként kell szemlélni a motort.Bekötések: Link
Nem tudom, hogy mi lenne, ha bekötnéd mind a 4 tekercset a vázlatod alapján  Ha van elég tranzisztorod, akkor próbáld ki! De a tranzisztorok bázisáramát azért korlátozd! Kiváncsi lennék, hogy mit sikerül ebből kihozni, a bekötési ábra alapján vagy gyengébb lesz a motor, vagy feltaláltad azt, hogy 1.8fok helyet 0.9fokot lép a motor. 
Szia
Összeállt a függönymozgató programja. Először úgy csináltam, hogy a távirányító megszakította a 629-es áramát, így is működött, csak nem lehetett megállítani, ilyenkor mindig irányt váltott, ami nem jó, mert így csak teljesen nyitott/elhúzott a függöny. Átvariáltam, a két végállás logikai ÉS kapcsolatba van (résopto) így csak 1 lábat foglal, eepromba menti milyen irányba mozgott a függöny (áramszünet esetére), a másik szabad lábra pedig a távirányító vevője megy, így menet közbe is meg lehet állítani, a következő megnyomásra elindul vissza. A motor egy fénymásoló scanner mozgatója, ebbe benne van 1 lassító áttétel + a csévélő rész is. Ma lesz kész a penel, + valami tápot csinálok, a lényeg a minél kisebb nyugalmi áramfelvétel 
 Három ötlet: a, A végállásokat úgy is lehetne használni, hogy ha benne van és indítod, akkor lépteti párat a motort, és megnézi, hogy még mindig benne van-e a végállásban, ha igen, akkor ellenkező irányba kell mennie. (ha éppen beleér, akkor leáll, és csak újabb indításra indul el újra, ezáltal áramszünet esetén se lenne baj.) b, Tápellátást lehetne úgy is, hogy távirányítóval nem PIC lábat bizgerálsz, hanem "behúzó-tartó" tápot indítasz neki. És a végállás kapcsoló elérésére a pic saját maga állítja le a tápját. Ezáltal nyugalmi áram=0 a pic részéről c, Egy pic lábat használhatsz indítás/leállításra is, illetve innentől akár irányváltásra is. Dupla-kattintás elvén megcsinálható lenne.  egy gombnyomás: leállít, két gombnyomás: balra, hosszú vagy három gombnyomás jobbra. Ezáltal a távirányítón lehetne 3 gomb: bal-stop-jobb. Így akár centiként állítható lenne. egy gombnyomás: leállít, két gombnyomás: balra, hosszú vagy három gombnyomás jobbra. Ezáltal a távirányítón lehetne 3 gomb: bal-stop-jobb. Így akár centiként állítható lenne.Akár SPI-n vagy stb-n is kommunikálhatna, de így egyszerűbb a programírás, ha még nem használtál ilyent. Egyébként Gratula!
Jók az ötletek.
De, mivel már kész a panel, ezért nem sokat akarok módosítani. Áram alá helyezéskor kiolvassa az eepromból, hogy milyen irányba ment és eltárolja egy boolean változóba, és csak megálláskor (leállítás, végállás elérése) ír az eepromba, így biztos nem fordulhat elő, hogy : végállásba áll->, áramszünet-> elindul rossz irányba és eltépi a hajtást. Végállásból induláskor az első 150 ciklust figyelmen kívül hagyja, és csak utána figyeli ismét a végállást. Az egész, vevőstől mindenestül elmegy egy 5VA, 2x9V-os trafóról. Majd lehet, hogy ha gyengének bizonyul akkor kicserélem a 2 ohm-os előtét ellenállást 1 ohm-osra ami a léptető motor áramkörébe van. üdv üdv
Üdv,
Kérdésem a következő, bipoláris léptetőmotornál meg van adva az áram és tekercs ellenállás, ebből adódik egy tekercsfeszültség. pl: 1,2V, ha ezt 12Vról tápfeszültségről akarom üzemeltetni, akkor milyen vezérlő szükséges hozzá?
Chopper-táp.
Ez benne van a legtöbb cél-ic-ben.
Üdv
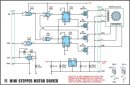
Segítséget szeretnék kérni, készítettem egy léptetőmotor vezérlő áramkört, de valamiért akár milyen módon próbálkozok csak zúg a motor és langyosodik, valami nem stimmel.. Adatlapja pdf-ben itt van. A motor rákötését az áramkörre kipróbáltam a létező összes módon.. ugye 6 kábel, az ki lehet számolni mennyi lehetőség.. egyik se volt jó Nem tudom mivel lehetne forgásrí bírni a motort.. egy négyszög jellel? Meg hova kell kötni? Azt hiszem az egyik bemenet a forgásirány és csak + vagy - -ra kell kötni. A másik, hogy mennyit lépjen, a többit meg nem tudom. :S Valaki segítsen pls. Előre is köszönök mindent.
A sematikus ábrán látod a motor szerkezetét...
A tekercsek közös pontját kell megkeresni (ezeket utána akár össze is kötheted). Egyszerűen ellenállásmérés. Elkezded méregetni, elég hamar szét tudod válogatni a két tekercspárt (ahol mutat valamit a műszer, azok tartoznak össze). Ezután a közös pont az lesz, ahol a másik két szállal azonosat mutat a műszered. Miután a közös vezetékeket összekötötted, arra teszed az egyenáram egyik pólusát (polaritás mellékes, de érdemes úgy bekötni ahogy használni fogod, tehát általában az a pozitív. Ha fordítva adod rá a tápot, akkor is megy általában, csak fordítva forog.) Ezután a többi vezetékre sorban kapcsolva a negatívot a motor minden esetben meg kell ránduljon. Amennyiben a megfelelő sorrendben kapcsolgatod (1-2-3-4 tekercs, majd újra 1...) akkor forogni fog. Érdemes lehet valami mutatót tenni a tengelyre, ugyanis elég kis elmozdulások lehetnek. Kisérletezéshez a tényleges tápfesz fele is elég, és csak rövid ideig kösd rá. Ugyanis a léptetőmotor szakaszos üzemre van tervezve. Így amikor nem lépteted (később az áramkörnél), akkor alacsonyabb feszre kell kapcsolni (tartófeszültség, erre azért van szükség, hogy ne tudjon kimozdulni az adott pozícióból).
Anton nagyon szépen köszönöm a gyors választ.
Megépítettem örömömben megint a kapcsolást mert egy időre félreraktam mondván, hogy nem működik... Összekötöttem az alapján, ahogy te mondtad kimértem stb... szerintem valami nagyon alapvető dolgot hagyok ki, az osc és a step pontokra mit kell kötni? 555IC-vel 1 négyszögjelet? Ha tápot kap nem csinál semmit nem rándul... fixen tartja a helyét.. az jó? A dir pontot ráhúztam a +ra. Ja és elvileg úgy forog a motor, ha a pozitív ugye alapból rá van kötve a narancssárgára és a feketére (majd képen látod) és a negatívot a következő sorrendben kapja: Citromsárga Barna Zöld Piros aztán előről.... Várom válaszod és még egyszer köszönöm
A DIR pontot vagy +5V-ra húzod (arra a feszültségre amiről az IC-k mennek), vagy GND-re kötöd. Ez csak a forgásirányt befolyásolja.
A kapcsolási rajzon alul bal oldalt egy kis oszcillátort látsz, ami előállítja a szükséges (valószínűleg négyszög) jelet. Az egész áramkört úgy kell használni, hogy bekapcsoláskor megkapja a feszt. A dir bemenet állása határozza meg a forgásirányt. Ezután a step bemenetre adott impulzus hatására (talán a lefutó élre?) fog egyet lépni a motor. Magyarul amíg az OSC és STEP össze van kötve addig forog a motor. A potival tudod a lépések sebességét állítani (valójában az oszcillátor frekvenciáját állítod vele) A kapcsolás viszont elfelejti a tápfeszültség megszűnésekor hol állt így az első lépésekkor össze-vissza mozoghat a motor. És az áramkör NEM gondoskodik a tartófeszültségről, így azt vagy máshogy oldod meg, vagy alacsonyabb feszültségről üzemelteted (gyengébb lesz a motor). Valamint ez a kapcsolás kizárólag teljes léptetéses üzemmódot tud (ami a kedvencem egyszerűségénél fogva) Szerintem mérd újra a motort... Ezeknél a nyomtatóból való motoroknál úgy szokott lenni a bekötés, hogy (ha a motornál nézed) az egy sorban lévő három madzag az összetartozó két tekercs, a középső a közös pont... (tehát elvben a két pirosra meg a +) Igen amikor bekapcsolod az áramkört valamelyik kimenete aktív lesz, és tartani fogja a motort...
Keresgettem a fórumon, de nem találtam választ.
Van két db 5 kivezetéses unipoláris léptetőmotorom, az egyik Sankyo (70 ohm), a másik Mitsumi (77 ohm). Ahogy próbáltam vezérelni ezeket, azt tapasztaltam, hogy nem egyenletesen lépnek. Egyfázisú módban, azaz amikor csak egyenként gerjesztem a tekercseket, egy kicsi, majd egy nagy lépést tesz meg, de ez mindkettő motorra igaz, csak különböző mértékben. Ha más sorrendet próbálok, akkor vagy ellenkező irányba indul, vagy oda-vissza szenved. Féllépéses módban pedig két kisebb, majd két nagyobb lépést produkál, ahogyan az várható az egyfázisú mód után. Átolvastam pár cikket, de nem találtam erről semmit. Tud valaki magyarázatot adni, vagy valamit benéztem?
Szia
Mivel, gondolom kipróbáltál minden variációt, vagy a programba lesz a hiba, vagy a végfokkal, (azt nem tartom valószínűnek, hogy mindkét motornak zárlatos lenne egyik tekercse) Üdv
Köszi a választ!
Még gyötröm majd magam... Annyi fejlemény van, hogy megnéztem alaposabban a másik motort is (Mitsumi): féllépéses módban három kicsi és egy nagyobb lépést tesz egy ciklusban (míg a másik motor esetén ez két kicsi-két nagy).
Túl sok hiba nem lehet, mérd meg a tekercseket, hogy egyforma-e az ellenállása.
Mivel próbáltad? Írtál egy programot, ami másodpercenként léptet? Fölrakhatnád a kódot, mert így túl sok ötletem nincs. Mi a végfok? Mekkora feszültséggel próbáltad? Mekkora a motor lépésszöge?
Ez alapján raktam össze:
Kapcsolás Csak nálam PIC van, + LED-ek a vezérlő lábakra (látom, hogy lépked) + egy nyomógomb a léptetésre. Viszont USB 5V-ról megy a motor és a PIC is. (Nem, nem szokott resetelni ettől. ) Breaking news: most kipróbáltam mindkettőt 12V-os tápról, és végre kikupálódott a járásuk. Nem mellesleg jól fel is melegedtek a rövid próba alatt. Azt gondoltam, hogy ezek a motorok nem 4,xx V-ra vannak tervezve, meg hogy gyengus lesz, de hogy ilyen furcsán fognak járni... Zsoltee azért köszönöm a segítséget, ha lehetne a találgatásért pontot adni, nem haboznék.
Pont ezért kérdeztem, hogy mekkora fesz-ről járatod
Az a 70 ohm jó sok, ebből gondoltam, hogy legalább 24 voltal lehet kenni neki. Idézet: „Nem mellesleg jól fel is melegedtek a rövid próba alatt” Az viszont baj! Nem kellene egyáltalán melegednie, max langyos, főleg, ha ilyen kisteljesítményű. Vigyázz, 60 fok fölött a mágnesességének szevasz lehet! És akkor kuka! Én megnézném azokat a tekercseket mégegyszer ohm-mérővel. [/OFF]Szívesen, nekem is sokan segítettek már.[OFF]
Olyan 45°C-nál nem lehetett melegebb, az a motoron belül ~50°C. Az volt a gond, hogy a tekercseken viszonylag sokáig rajtamaradt a tápfesz., mert ugye léptet, berajzol hová ugrott, ismét léptet, sit. Egy tekercs ráadásul két lépésig volt üzemben. Na majd a PWM...
Segítségeteket szeretném kérni.
Kiszedtem egy barátságos méretű motort egy (Tandon) háborús lézernyomtatóból. Első ötletem az volt hogy használom az integrált elektronikáját, és a panel szélén lévő 7pin-es csatlakozón keresztül vezérlem. Kerestem az interneten, de igazából semmit nem találtam. A típusa: Kokusan Denki TA0401 Próbáltam a vezérlő IC-kre rákeresni de még azokról sem találtam leírást. Gondoltam tovább bontom (mivel a nyák oldalt takarta egy tengely-el együtt épített fémburkolat). Azt leszedve először örömmel tapasztaltam hogy 6 vezeték jön fel a tekercsekből. viszont abból 3 össze van kötve. A másik három jelzése U,V,W. Próbáltam ilyen jelzésekre rákeresni google-ban de azt sem találtam. Ezután tanácstalanságomban hozzátok fordulok. Remélem tudtok segíteni nekem. Próbáltam ezt a 6 csatlakozót lemérni, de mindegyik között mértem ellenállást, feltételezem a belső elektronika miatt. (az u,v,w és a 3 összekötött között egységesen mértem 3Ohm-ot. az U-V, U-W, V-W között egységesen mértem 5.5 OHm-ot) Lehet máshol lennének a kivezetései? Előre is köszi
Hello!
Az U-V-W-(X-Y-Z)-re hiába keresel rá az interneten, ez a szokásos háromfázisú motor tekercs kivezetéseinek megnevezése. A mérés alapján is látható, hogy a három tekercs, csillagpontos kapcsolásban van összekötve. A csillagpont a három összekötött tekercsvég. A (X-Y-Z) csillagponthoz képest a "fázis ellenállást", az U-V-W fázispontoknál egymáshoz képest a fázisellenállást méred. Vagy is a kétszeresét. üdv! proli007
Köszönöm a választ, ami egyben meg is döbbentett.
Én valamiért teljesen abban a hitben éltem hogy ez léptetőmotor. Leginkább azért mert 24 lépés/fordulat le tudtam számolni vele (éreztem az ugrásokat). Teljesen új fogalommal kellett megismerkednem BLDC néven. Valamikor tanulmányaim során volt szó róla... És valóban a gyártó holnapján is Brushless Motors néven van fenn, olyannyira hogy meg is találtam szerintem a motor nevét BLM06 néven. Szerecsére találtam jó leírásokat a BLDC motorokat illetően. Viszont kérdésem csak lenne még ebbe a fórumba is, léptetőmotorokat illetően. Ez a motor miben tér el a léptetőmotoroktól? lényegében a BLDC-nél is impulzusokat adunk a tekercsekre adott periódusban ami mozgásba hozza/tartja a motort. Csak míg a léptetőmotornál 4 fele van osztva a belső tér addig itt (csillag/delta szerint) három fele? A BLDC-nél olvastam hogy a motor terhelés esetén kieshet a szinkron működésből, ezért (esetek nagy részében) hall elemeket tesznek rá és azzal figyelik a vezérlők hogy éppen hol jár a forgórész. A léptetőmotoroknál ilyen probléma miért nem állhat fenn? (hogy kiesik a ritmusból) Köszi az eddigieket is már ez is hatalmas segítség volt. 
Hello!
A kollégák majd választ adnak a kérdéseidre, mert én nem foglalkozom különösképpen léptető motorokkal. De az biztos, hogy ezek is ki tudnak esni az üzemből. De hogy a háromfázisú motor "három fele" lenne osztva, az csak akkor igaz, ha egy póluspár van benne. De több póluspár (tekercselés) esetén más a helyzet. Egy sima aszinkron motort is tulajdonképpen a sleep hajtja, és ha ez nagy értékű, akkor az is "kiesik a ritmusból". Egy póluspárú 50Hz-es motor fordulata közel 3000, míg a két póluspárú közel 1500. És így tovább.. üdv! proli007
Sziasztok!
Most készítek egy CNC gépet, aminek az elektronika rajzát a HobbyCNC oldalról szedtem le! Megvan már a PIC16F877 vezérlés, és a végfok, ám most próbáltam ki a MACH3 progit. Eddig amit én beleírtam a PIC-be, azt csinálta. Sajnos megfogott ez a Step/Dir dolog, nem tudom, hogy pontosan hogyan működik. Régebben a HobbyElektronika újságban volt egy házi lézershow építés, ami elvileg Step/Dir üzemmódban ment. 1. lépés 00 2. lépés 01 3. lépés 10 4. lépés 11 Valahogy sejtem, hogy nem erről van szó. A MACH 3 program kiadja a jelet, és az lenne a kérdésem, hogy ezt milyen program logikával kell megoldani ahhoz, hogy a PIC-ből kijövő vezérlés a végfokra, elindítsa a motorokat, vagyis valami konvertálást kell végezni. Erre keresem a választ már 4 óra óta  Köszi
Step-et bekötöd Int0 interruptra, Dir-t pedig szabadon választott lábra. Amikor interrupt érkezik, megnézed, hogy a Dir milyen jelszinten van. Pl. ha 0, akkor jobbra léptetsz, ha 1 akkor balra.
|
Bejelentkezés
Hirdetés |