Fórum témák
» Több friss téma |
Tehát ha pótolja ezt a 470ľF-os kondit akkor használható lesz?
Azt nem tudom, mert nem látom a tényleges kapcsolási rajzot. De a kondi nélkül biztosan nem lesz jó.
Üdv, mindenkinek.
Nekem szükségem lenne egy motor fordulat szabályzóra (PWM), a motor adatai amihez kell az egy 24V-os 250W-os motor. Találtam itt a fórumon sok kapcsolást csak nem nagyon értek hozzá hogy melyik a jó ezekhez az adatokhoz. A segitséget előre is köszi.
Szia!
Nalam ezen kapcsolas fut szepen. Annyi kiegeszitessel hogy a motorral parhuzamosan van kapcsolva egy scotty dióda a FET vedelmenek erdekeben.
Na de viszont ez 12V-os ha jó látom ,nem?
És ez elbir 30A-os terhelést mert inditáskor nálam annyi van, vagy néha még több is.
Az elektronikanak /PWM resz/ adsz 12v-ot Zenerrel vagy 7812-el eloallitva
A FETet meg kozvetlenul tudod a 24V-ra kotni. A teljesitmeny meg csak a kapcsolo eszkoztol fugg. IRF 1405 -> 55V 169A 330W IRFP 064N -> 55V / 98A / 150W
Aha értem, akkor szerintem ki is próbálom ezt a kapcsolást egy rollerbe kell, még egy kérdés hogy az LM555, az egyenlő a NE555N-el?
Meg az hogy nemtudom hogy a rollerba a gázkar hogyan van megoldva, milyen értékű az ellenállása. Ja és még annyi hogy az 1N5818-as diódát lehet helyettesiteni 1N4007-el?
Szerintem nincs kulonbseg az 555os IC-k kozott.
A Gazkar ellenallasarol nincs infom  A diofak nalam is 1N4007-ek.
Oké, köszi.
Ha megépitettem, majd megirom, hogy mik a jelenségek. 
A FET huteserol NE FELEDKEZZ meg!
Ilyen aramoknal, mar melegedhet a szerkentyu  Varom szives beszamolodat.
Már el is készitettem a vezérlőt. Átnéztem a raktárkészletemet és találtam benne minden alkatrészt ami az áramkörhöz kell.
 Tökéleten működik, elsőre indult. Igaz még csak 12V-al próbáltam, meg csak egy aksis fúróval, mert nem volt hirtelen kéznél más, meg FET is csak gyengébb volt hozzá, de működik. Köszi a kapcsolást és a segitséget.  (És egy kérdés hogy még azt a diódát azt hogy kössem be, és milyen értékűt mármint terhelhetőségűt?)
Szia!
Gratulacio a gyors pontos es jo munkaert. Melleklek egy kepet ami szerint kotottem en is be a diodat. Ha jol emlekszem a forumon olvasotakra, akkor min akkorat mint a motor aramfelvetele. Ez vedi a FETet a keletkezo feszultsegtuskektol.
Megtamogatva elobbi irasomat:
Vilmosd-tol: Idézet: „...Ez a dioda biztositja, az aramkor megszakitasakor, a terheles onindukciojan letrejovo aram levezeteset (Lentz torveny).....” katt-tol: Idézet: „....Az a baj, hogy amikor a FET-ek kikapcsolnak, akkor a motor árama nem tud hol továbbfolyni. Akkora túlfeszt generál, amin az árama le tud épülni, ez akár ezer volt is lehetne, de előtte persze átüt a FET és rövidzár lesz. Onnantól pedig a motor forog az akksiról... a dióda azért kell, hogy amikor a FET-ek kikapcsolnak, akkor a diódán tudjon tovább folyni a motor árama.....” s vegul potyo tollabol irottak: Idézet: „....A lendítő dióda viszi a motor áramát, amikor a fet kikapcsol. Nélküle a motor induktivitása miatt feszültségtüske jelenne meg a mosfeten, átütné a mosfetet és tönkretenné azt. Motornál kell a dióda, izzónál nem kell.....”
Aha, igy már értem.
Köszi a képet, és a hasznos tanácsot. Csak nekem azért olyan 30-35A inditóáramra nehéz diódát találtam. Linkeltem egy diódát. Bővebben: Link Ez jó lesz 40A-os de ez 3 lábú az nembaj? És ezt a diódát kell hűteni?
A tanacsokat nagyon szivesen. En is ingyen kapom oket.
Amit itt irok, az a meglatasom es nem biztos, hogy hibatlan! Szerintem nem lesz gond az indito arammal. Hisz a szabalyzas 0V-tol indul. S ugye nem mind1, hogy direkt 24-et kap, es nullarol kell felporognie, vagy a szabalyzasnak koszonhetoen a 24V eleresekor mar nem kell indulnia. -mert ugye mar forog -A dioda kerdeshez sajnos enm tudok erdemben hozzaszolni az pedig, hogy 2v3laba van nem oszt s nem szoroz csak JOL kosd be az aramkorbe.
Jó a dióda bőven, itt nem nagy áram fog folyni.
A két szélső lábat összekötheted - ezzel a két benne elevő diódát párhuzamosítod, megduplázva a max áramot. A középső láb a közös katód. De ezt rá is szokták gravírozni. De rövid impulzusban ez a dióda 400A-t is elvisel, oldalanként.
Oké. értem és köszi a segitséget. Akkor majd úgy bekötöm ahogy mondtad.
Hát az inditó áramot azt nemtudom, de majd a gyakorlat megmutatja, már csak a diódát megveszem és a FET-et és elkezdem beépiteni a kivánt helyére, de szerintem majd csak jövőre lesz kész mert nemnagyon sok az időm.
Hidd el, mi meg varuk, nem szaladunk sehova. Itt leszunk es veled orulunk vagy bánkodunk sikereden vagy bukasodon.
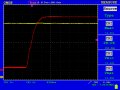
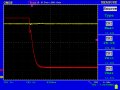
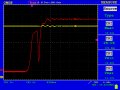
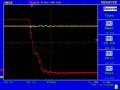
Visszalapozva a témában, láttam hogy a tranziensek kérdésével már foglalkozott valaki. Hasonló az én esetem is. Az EPE magazin 29. oldalán található kapcsolásból ollóztam ki a fet me...tást. Ebben a nagyjából szokásosnak mondható komplementer tranzisztorpár szolgáltatja a szükséges áramot a fet gate elektródájára. Azoktól kérdezem elsősorban, akik hasonló kapcsolást már építettek, hogy mi okozhatja a mellékelt szkópábrákon a fet bekapcsolásánál ( felfutó él ) a lehúzást nem sokkal a bekapcsolás után. Persze ez a visszahajlás motorterhelésnél jelentkezik. Ha a kimenetre nem kötök motort, akkor szép sima ki-be kapcsolások történnek ( bár a felfutó élen ott van egy kis bütyök ). Kinek van hasonló tapasztalat, esetleg ötlete arra, hogyan lehetne szebbé tenni az átmenetet. Vagy ennek a kapcsolásnak ez a maximuma?
Az egyes és kettes ábra motor nélküli jelalakot mutatja a gate lábon ( piros ) illetve a tápfeszt ( sárga ). A harmadik és negyedik motorral terhelve a kimenetet. A hajtás akkumulátorról megy, a motor egy kb 100W-os 12V-os motor ( talán zsiguli motorhűtő-ventilátor motorja ).
Kicsit hosszú leszek, bocs
Áttúrtam már sok oldalt, hátha közelebb jutok a kérdéshez, de nem.. Adott egy motorom, és szeretnék hozzá egy pwm-es szabályozót megvalósítani, ami képes arra, hogy a beállított fordulatszámon tartsa meg a motort. Ehhez megvan ugye a motor maga, ezen egy résoptó, ami érzékeli a motor fordulatszámát (félbevágott kör, tehát fordulatonként egy pár élváltozást okoz). Ebből tudom a motor aktuális fordulatszámát, és van egy pwm jelem, amit változtatni tudok 0-100% között. Felvettem egy diagramot, ami mutatja, hogy a kiadott pwm jelre hogyan reagált motor. Úgy vettem fel, hogy egy százalékkal növeltem a pwm kitöltését, és megnéztem a motor fordulatszámát (a függőleges tengelyen a motor fordulatszámával fordítottan arányos érték van -> minél gyorsabb a motor, annál kisebb a szám). Minden egyes pwm változáshoz 50 mérést végeztem, így kaptam a mellékelt ábrát. (Az elején van egy ugrás, azt nem kell nézni, átfordult a változó )Látható, hogy kb 33%-nál kezd el forogni a motor, először exponenciálisan, majd közel lineárisan viselkedik. Namost, erre a jelleggörbére kellene nekem egy algoritmus, ami a beállított alapjelhez (mondjuk 60%) hozzáigazítja a motor fordulatszámát. (Egyébként egy atmega8-cal csinálom, de ez szerintem mellékes) Ötletek?
Szerintem máshogy kéne nekifutni. Egy potméter állása szabályozza a kitöltést (AD bemenet) és egy a fordulattal arányos feszültség (másik AD bemenet) , ezen értékek összehasonlítása alpján állítani a pwm kitöltést.
Én az egészet egészen másképp (amugy sokszor sok helyen nagyon bevált modszerrel) csinálanám.
1. A PWM jelet egy 3szög jelböl állitanám elö (1-2 analog OPAMP). Itt állithatod a frekit stb. 2. Az ilyen áramkörökben feszültség szinttel határozod meg a kapcsolás szintjét, azaz a 3szög jel és egy sima DC jel van összehasonlitva, és amikor a 3szög jel szintje nagyobb mint a DC, kapcsol a kimenet (PWM). 3. A DC jel egy részét nagyon egyszerüen a motorból kapott résoptóból lehet levezetni (azt integrálni - igy az igy kapott jelet hozzáadhatod a DC szinthez. Ha gyorsabban jönnek az impulzusok a DC szint magasabb lesz, a PWM szélesség csökken és forditva. Ezek után már csak optimalizálni kell a szinteket, hogy beálljon az egyensúly.
Szia!
A kérdés csupán annyi, hogy mennyire akarod "pontosan" meghatározni és tartani a beállított fordulatszámot? Érdemes e ennyire elbonyolítani a dolgot? A motorra szerelt tárcsa nem is tesz lehetővé precíz mérést, mondjuk, ha lenne rajta legalább 2-300 megszakítás fordulatonként, akkor esetleg, de így? Mi lenne a felhasználás módja, ha nem titok?
Egyáltalán nem titok!
Egy kis terepjáró robotot akarok építeni, és azt szeretném, hogy a terep nehézsége ellenére is tartsa meg a járgány a beállított sebességet. Ha meredekebb, vagy kisebb akadályok jönnek közbe, akkor automatikusan adjon a motorra több kraftot. A gondom azzal van, hogy nem lineáris a motor karakterisztiákja, és ezt szeretném valahogy figyelembe venni. Látható hogy 33%-os kitöltési tényezőig meg se mozdul, utána viszont megindul mint a meszes. Az egyszerű az lenne, ha adnék neki egy fix áramot, de ez a fentiekben vázolt követelményt nem tudná teljesíteni. Elsősorban a lassú mozgás okoz gondot. A motor egyébként egy lassító áttételen keresztül dolgozik, tehát tudom mérni viszonylag pontosan a sebességét (mint az a diagramon látszik is). Amivel eddig próbálkoztam, az egy különbségképző megoldás, de annyira jól sikerült a különbségképzés, hogy el se indul, sőt, ha én lököm meg kézzel, akkor még küzd is ellene
A lényeget nem írtad le: a két AD bemenet egyforma feszültségértékű legyen a működés során. Vagy a ( majdnem ) teljes tartományban a kettő hányadosa konstans legyen.
Szia!
nem feltétlen, a beolvasott adatot úgy szorozza, osztja ahogy akarja...
De akkor is ugyanaz az arány marad az alapjel és a visszavezetett jel között. Különben nem lesz szabályozott, vagy nem teljes egészében csak a poti határozza meg a fordulatszámot. ( lehet olyat is )
Érzésem szerint nagyon kifejezett a karakterisztika kezdeti meredeksége, majd később kimondottan lapos lesz. Félek, hogy ez az analóg eljárás nagyon megbízhatatlan lenne, Kicsi lenne a dinamikája.
szerk.: Katt-nak szántam |
Bejelentkezés
Hirdetés |