Fórum témák
» Több friss téma |
Fórum » Robotfűnyíró vagy fűnyíró robot
A pontos 90 fokos pozicionálás nem gond egy iránytű modullal, pl olyannal amit linkeltem.
A túlterhelés védelem engem érdekelne, de szerintem másnak is jól jöhet. A mechanikával még mindig küzdök. 
Én gépész vagyok én az elektronikával küzdök....
Az én gépemben egy normál benzinmotoros fűnyíró lesz beszerelve. A meghajtásra 2 db 64Ah-s akksi van beépítve és kerekesszékhajtóművek hajtják 250mm es gumikerekekkel. OK nekem terpre kell. S lehet hogy ez lánctalpassá alakul a télen. Tehát az én rendszerem 24V os ennél kisebb feszültséggel is üzemel mindegyik ic át kell számolni néhány dolgot a kapcsolásban de tegnapelőtt ez már a totális rövidzárat is bírta a motor kapcsain.Muszály volt kipróbálnom, nehogy meglepi legyen, később.
"S lehet hogy ez lánctalpassá alakul a télen." Nálatok milyen sűrűn kell füvet nyírni télen ??
Hát épp azért akkor mert télen nem kell mással foglalkozni
s akkor van idő hegesztgetni.
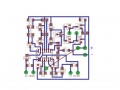
Ez a pwm-es h-híd nagyon jó!
12V-os motortápfeszültség esetén sok mindent kellene módosítani rajta?
Szerintem az a fő kérdés mennyit csökkenhet az akkufeszültség.
Az IR2104 10-20V ig működik. Legalább 10V táp kell neki a többi egység 5V ról megy. Vagy kutatni kell olyan SD bemenettel rendelkező IR ic után ami 10V nál kisebb feszültségen üzemel. Akkor nagyon mást alakítgatni nem kell. A cmos555 5 v-al megy áramérzékelő szintén
Vagy ha a stabil 5 v-ból készítesz egy dc-dc konverterrel 15V ot az IR.ek számára.
Mi lenne ha egy max620-as ic-t tennék bele? Ez 4,5 - 16,5V között működőképes.
És mivel eleve quad ezért elég is lenne ez az 1 ic. Van valami ami miatt ez az ic nem lenne jó? Kérdés visszavonva, mert nem találok hozzá magyar árat. Valószínűleg nem igazán beszerezhető.  A hozzászólás módosítva: Nov 5, 2012
A hestore-ban találtam alternatívákat.
MC 34152 P vagy MC 33152 P vagy MC 33151 P Ezek 6,5 és 18V között működőképesek.
Köszi az infót, rendelni fogok egy iránytűt, legalább kísérletezni fogok vele egy kicsit.
Ennek a megoldásnak az az előnye, hogy jöhet gödör, vakondtúrás, akkor is tudja tartani a gép a helyes irányt. A kérdés csupán az, hogy milyen pontossággal és ez megfelel-e a céljainknak. A héten szétszedem a gépet, le fogom fényképezni a tengelyeket, úgy biztos jobban meg lehet érteni. Morfondíroztam sokat a harmadik keréken, szereztem is irodaszék kerekeket, de egyszerűbbnek tartom a merőkanalat. Szinte ugyanannyi a súrlódása, tehát majdnem ugyanannyi az áramfogyasztás, nem koszolódik el, egyszerűbb a beépítése, ezért döntöttem mellette. Egy ilyen kicsi gépnek szerintem ez is elég. Persze akár forgókerék, akár merőkanál, mindkettőnél az a jobb, ha a hajtókerekek ezt húzzák maguk után. Nem pedig tolják, mert az plusz vezérlési problémákat okozhat.
Nagyon komoly gépet csinálsz, remélem, láthatjuk majd, ha kész. Hiába, itt most előnyben vannak a gépész tudásúak
Ez a vezérlő egység nagyon profi és az áramfigyelő kivételével olcsó alkatrészekből el lehet készíteni. Nagyon tetszik nekem ez az ACS713 ki is próbálnám, de nem találok sehol mintaküldést, ha tudtok valahol szóljatok.
A Híd kapcsolása Pimi9 munkája nem az enyém!
Az Acs-re Tinky hívta fel a figyelmemet én csak összeollóztam és egységbe foglaltam. Ez az igazság. ACS 713 a RET-nél 680+áfa .Szerintem ez nem egetrengető összeg. igaz nettó 2000 forint a rendelési limit+ posta de egy alkalommal ezt meg lehet lépni szerintem. 5 sör ára. Szerintem a hídvezérlőket meg ki kell próbálni. De az IR eknél van fix Deadtime. Ezzel tehát nem kell foglalkozni. illetve az egész lényege az SD láb amivel gyorasan le lehet tiltani a hidat ha gebasz van. Én inkább egy feszültséginvertert csinálnék a helyetekben, mégha elsőre hülyeségnek is tűnő gondolat is. Minimális teljesítményigénye van az IR-ek nek. De az akku merülése esetén így biztosabb a híd vezérlése. Nekem a 24v ról van bőven tartalékom. De nektek 12 ről nem igazán. Persze ha kész lesz csinálok videót. A hozzászólás módosítva: Nov 7, 2012
A Híd kapcsolása Pimi9 munkája nem az enyém!
Az Acs-re Tinky hívta fel a figyelmemet én csak összeollóztam és egységbe foglaltam. Ez az igazság. ACS 713 a RET-nél 680+áfa .Szerintem ez nem egetrengető összeg. igaz nettó 2000 forint a rendelési limit+ posta de egy alkalommal ezt meg lehet lépni szerintem. 5 sör ára. Szerintem a hídvezérlőket meg ki kell próbálni. De az IR eknél van fix Deadtime. Ezzel tehát nem kell foglalkozni. illetve az egész lényege az SD láb amivel gyorasan le lehet tiltani a hidat ha gebasz van. Én inkább egy feszültséginvertert csinálnék a helyetekben, mégha elsőre hülyeségnek is tűnő gondolat is. Minimális teljesítményigénye van az IR-ek nek. De az akku merülése esetén így biztosabb a híd vezérlése. Nekem a 24v ról van bőven tartalékom. De nektek 12 ről nem igazán. Persze ha kész lesz csinálok videót. Még valami! Nagyon fontos a hídban lévő pufferelkó low esr-típusú legyen és az összes elkó a fetek és az ir-ek környezetében ezt mind egy kosszal a RET nél megrendelheted a 3300 mikrós elkó nem lesz olcsó az is kb 600 darabja. A hozzászólás módosítva: Nov 7, 2012
Szétszedtem a gépet, remélem, jól látszik a képeken az összekötés.
Az ablaktörlő motor tengelyének 8-as menete van, mindkét oldalon nutolva. Erre tekertem rá egy 8-as menettoldót, amit a nutnak megfelelően kifűrészeltem két oldalt. A toldóba betekertem a menetes szárat és egy kontraanyával egymáshoz szorítottam. Ezután két kis lemezkét csináltam, amit két csavarral a nutoknál összefogtam. Sajna nem vagyok egy gépész kiválóság,  de a videon is látszik, hogy működött. A két kis lemezkét vasból kell gyártani, mert én aluból csináltam és biztos, hogy egy idő után el fog maródni. de a videon is látszik, hogy működött. A két kis lemezkét vasból kell gyártani, mert én aluból csináltam és biztos, hogy egy idő után el fog maródni.Szerintem az IR2104-et nyugodtan lehet használni, mert ha az akku 11 Volt alá esik, úgyis menni kell tölteni. Az adatlapban pedig minimum 10 Volt szerepel. Azért egy kisérleti áramkörben próbáld ki, az a legbiztosabb. Az MC 34152 és társai ide nem jó, mert ezek csak sima FET meghajtók, nincs bennük szinteltolás. A hozzászólás módosítva: Nov 7, 2012
jó az!
Ez milyen ablaktörlő motor? Az enyémet sajnos meg se mozdította. Igaz egy Briggs motoros fűnyíró van benne a mi maga 40 kiló plusz a két akksi. plusz a váz. Próbáltad már úgy hogy rátettél annyi súlyt mint amennyi a motor és az akku lesz? A tietekben a fűnyíró motor is az akkuról fog menni?
Igazad van, ezen teljesen átsiklottam, hiszen az akkut nem merítem 10V alá!
Akkor nem is kell semmit átterveznem a kapcsoláson. Kösz a képeket. Egy erre kicsit hasonlító megoldást akarok én is.
még talán annyit hogy ha egy csövet húznál rá amit hosszában felhasítasz és néháb awa bilincsel megrögzíted akkor körkörösen stabilabban fogod meg.
Ez eddig kész van.
Idézet: „jó az!” Miajó? Mitsubishi ablaktörlő motor, elég erősnek látszik. A ház és az akksi nem túl nehéz, ugyan nem próbáltam, de talán tízszer ennyit is kibír. A fűnyíró motort autóhűtő motorból tervezem, az se túl nehéz. A két hajtómotor kb 2-2 Ampert vesz fel, a fűnyíró is 3-4 Amper között lehet, tehát egy 15-20 Ah körüli akksi elég kell, hogy legyen. Idézet: „még talán annyit hogy ha egy csövet húznál rá amit hosszában felhasítasz és néháb awa bilincsel megrögzíted akkor körkörösen stabilabban fogod meg.” Isteni ötlet, köszönöm! Ezt fogom megcsinálni! Ha van még ilyen ötleted, mindenki szívesen veszi. Jól néz ki a nyákterv, bár az IC lábak kifacsarása nem túl elegáns, de célravezető megoldás. Egy olyan nehéz gépnek, mint amit csinálsz, kell egy nagytudásu bika meghajtó. Találtam a neten egy kábelkövető kapcsolást, elkezdtem építeni. Bővebben: Link Elég részletes leírás van róla, nem túl bonya. Ahogy terveztem, az elején a gép egy kábel mentén halad, közben beáll az iránytű, aztán majd meglátjuk. Van valakinek ezzel tapasztalata? Csináltam hozzá nyáktervet is: A hozzászólás módosítva: Nov 9, 2012
Ma rendeltem egy "HMC5883L Triple Axis Compass Magnetometer Sensor Module"-t. Remélem hamar megjön, ezt is be fogom építeni a robotba. Elvileg nem nehéz lekezelni, i2c-s kommunikáció.
Rendeltem én is egyet, talán a héten megjön. Valamikor csináltam I2C-t, fel kell frissíteni a tudást.
 Ha neked már készen van a program, megköszönném, ha megosztanád velünk. Ha neked már készen van a program, megköszönném, ha megosztanád velünk.Közben a motor tengelyére vasból sikerült kis szorítólemezeket készíteni, most már biztos a csatlakozás, semmi kotyogás nincs. Azért majd egyszer kipróbálom mrex ötletét is. Felteszem a motort hajtó H-hidat, nagyon egyszerű és üzembiztos. 6-7 Amperig nyugodtan használható, de a P-FET 14 Ampert is tud. Azért döntöttem az LM324 mellett, mert egyszerű, olcsó és ideális FET meghajtó a kimenete. 5 Voltos bemenete van, de beállítható más szintre is. A kapcsolás adja a Deadtime-ot is, nem kell ezzel a PIC-nek foglalkozni. Ha az ellenállásokat kisebbre vesszük, akkor nagyobb frekis PWM-el is tud működni. Balodalt van a 16F690 ICSP kivezetésekkel, még hagytam helyet egyéb áramköröknek, ha később kellene. Most a kábelkövetőt építgetem... A hozzászólás módosítva: Nov 13, 2012
Saját forráskódom még nincs, de már találtam pic-hez valót, ami szerintem szinte változatlan formában használható lesz! Az alábbi linken le is tölthető: Bővebben: Link
Tetszik a h-hidad, egyszerű, de jó. Az enyém kicsit bonyolultabb lesz, még nincs teljesen kész, nem volt annyi időm még, hogy befejezzem és kipróbáljam. Itt járok jelenleg. Szerk.: Nem félsz, hogy ha egyszer a pic megkergül, akkor lefüstölheti a hidat? Én ezért is tettem elé logikát. (Bár még nem tudom jól működik-e. )A hozzászólás módosítva: Nov 13, 2012
Húúú, de igazad van!
Szerencsére , amit megépítettem, az itt látszik. Az előző volt az első tervem, csak tévedésből azt raktam be. Ez már bolondbiztos a deadtime szabályozás miatt. A négy műveleti erősítő, mint a fényképen is látszik, két motorhoz kell.
Ez már tényleg jobb, én még egyvalamit változtatnék a helyedben a d1-d4 diódát kicsit nagyobbra cserélném. Ezt azért mondom, mert nekem is mondták.
Ne felejtsd el, hogy a dióda sorba van kötve egy 470 Ohmos ellenállással, tehát a max áram 25 mA lehet csak. A 4148-as impulzusban 2 Ampert bír ki. Ha az ellenállások 10 Ohmosak lennének, akkor is csak 1,2 Amper lenne a max áram, kb 20-30 nsec ideig, (mivel a Cgs kb 2 nF) tehát még ezt is bírná, csak az LM324 purcanna ki
Igaz. Ezért is nem szeretem az analóg dolgokat.
Sajna nem tudok haladni. Túl sok a munka a melóban. (ez mondjuk nem baj)Amit látok abból ahogy most működik. PWM ide PWM oda de a motorok a normális nyomatékot 65% kitöltés felett képesek leadni. Ez a "kerékvisszafogó" tesztek eredménye.
Nem úszom meg a fogaskerék/lánckerék/bordásszíj áttételt Lassítanom kell a motorokon amúgy is mert csúcssebességnél túl gyorsan halad.
Életet leheltem a kábelkövető robotba, nekem is lassítani kellett, mert féltem, hogy túl szalad a dróton,
szerencsére az ablaktörlő motor két sebességes.Ki mi épített? Régebben beraktam az oldalt, ahonnan a kapcsolást csináltam, de az első erősítőt követő kondi után már vittem a jelet a 690-es PIC komparátorára (ezért ilyen darabos a mozgása). Inkább az analóg bemenetet kellene használni, esetleg szoftveres PID-del. A kábelre 555-össel 40 kHzet adtam, az LC tag után szép színusz jel lett. Az erősítést egy TDA2009A-val oldottam meg, így kb 10 cm-ről már értékelhető jelet kaptam. Szóval ez így már használható lenne, de nem állok meg  Megküldték az elektronikus iránytűt, most megpróbálom megismerni a lelki életét. sirály12, neked is megjött már?
Nagyon jó lett a kábelkövetőd!
Nekem még nem jött meg, de minden nap várom már. Addig is tervezgetem a panelokat, a dupla h-híd már készen van, nemsokára gyártom le a nyákot hozzá. Jelenleg egy akkutöltőt rajzolgatok. És végre eldöntöttem, hogy nem egy routert teszek rá, hanem veszek egy ilyet: MRF24WB0MB Ezzel a wifi modullal teljes lesz a cucc. És gondolkodom még egy giroszkópon is, van is itthon egy, ezzel meg tudnám azt tenni, hogyha bizonyos szögnél jobban megdől, vagy csak felemelem, akkor leállítja a késeket és a motorokat.
Köszi!
Ez a wifi modul nem rossz,  szuper távirányítást lehet vele megoldani. Ilyet nem tervezek, de ha a kertben infra-sorompókat helyezünk el, akkor ez is tudja vezérelni a fűnyírót wifin keresztül. szuper távirányítást lehet vele megoldani. Ilyet nem tervezek, de ha a kertben infra-sorompókat helyezünk el, akkor ez is tudja vezérelni a fűnyírót wifin keresztül.Szerintem van egyszerűbb a giroszkópnál, pl ez:Bővebben: Link (láttam valahol sokkal olcsóbban is) |
Bejelentkezés
Hirdetés |