Fórum témák
» Több friss téma |
Nem láttam, hogy a rajzot, illetve fényképet mutattál volna a szabályzóról. Ezek nélkül nem lehet érdemi hibaokokat keresni. Ha jó is a kapcsolás, a gyenge konstrukció okozhat problémákat a kapcsoló üzemű fokozatokban.
A vezérlő panel.. 1 bizonyos ideig forgatja jobbra megáll majd balra forgatja
A panelon lévő relék a forgásirányváltást biztosítják? Ha igen, akkor mi biztosítja, hogy a fet kikapcsolt állapotban legyen, és a motor áram is már lecsökkenjen nullára irányváltáskor?
Ha ezt nincs biztosítva, a relék kapcsolásai könnyen tudnak olyan túlfeszültséget generálni, ami magyarázhatja a fet halálát.
Üdv.
Egy barátom megkért, hogy a modellvasútjához készítsek vezérlést amit telefonról lehet irányítani, a rendszer tulajdonképpen már készen van, Arduino alapokon nyugszik, viszont egy jelentős problémába ütköztem: az első tesztköröknél kellemetlen vinnyogó, erőlködő hangot adtak ki a mozdonyok motorjai, amik a kis kitöltésű PWM jeleknél és indulás előtt még durvábbak voltak. Először megpróbáltam magasabb frekvencián a zaj némiképp csökkent, de nem elviselhető szintre, majd párhuzamosan kötöttem egy kerámia kondenzátort(1uF) szűrésképp, de így sem lett jobb, ekkor jutott eszembe, hogy megpróbálhatnék egy lendítő diódát beszerelni...ezzel nem is lenne semmi gond ha a vonatok csak egy irányba mennének, viszont amint elkezdene tolatni a vonat azonnal tönkremenne a dióda. Ebben szeretnék segítséget kérni, hogy hogyan tudnám megszüntetni ezeket a kellemetlen felharmónikusokat. Köszönöm előre is !
Ha már arduinos alapon működik, akkor egy h hidas vezérlést lenne érdemes alkalmazni.
Mi az a lendítő dióda?
Amugy egy LC szurot tennek a motor ele. Igy megmarad a PWM vezerles, de a motor megis DC-t kap. igy nem sipol. Ehhez persze H hidas meghajtas kellene.
A H híd az meg van oldva azzal nincs semmi bajom, csak a zümmögés az brutális. :/
Hát a lendítő diódát alapesetben a motorral párhuzamosan kell bekötni úgy, hogy a katódja a pozitív tápfeszültség fele nézzen. Amikor a pwm jel magasról alacsony állapotba vált, egy pillanatra megszűnik a feszültség és a tekercs az addig a mágneses erőtérben eltárolt energiát visszaszolgáltatja ahogy összeomlik a mágneses tér és ha ezt oscilloscope-on megvizsgáljuk akkor jelentős mértékű feszültség "tüske"-ként jelenik meg és ez okozza a zümmögést motorvezérlő ic-ben(L293D) van védődióda, de ettől még a zümmögés semmit nem csillapodik. :/ Az LC szűrő jó ötletnek tűnik, bár nem tudom hogyan kéne meghatározni mekkora induktivitást iktassak a körbe. A hozzászólás módosítva: Aug 3, 2015
A frekvenciát próbáltam 2-4-8 és 64kHz-en, de mindegyiknél elég zavaró volt a zümmögés.
Próbáld meg 500 Hz környékén, mit csinál.. ehhez a motorhoz szerintem felesleges a sok kHz.
Nálam sima pwm-mel régi, nagy ablaktörlő tkp. teljes csendben és finoman megy.
Az tul magas. Egyes motorok optimálisan csak 500 Hz alatti frekin ( söt a régebbi motoroknak 200 Hz is sok szokott lenni) vezérelhetök ilyen PWM jellel.
Megpróbálnám én szívesen, de az Arduino miatt meg van kötve a kezem. :/
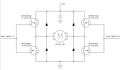
Bender92 rajzaban van négy dioda. Az a feszultsegtuskeket elnyeni, de a MOSFET-ek-ben ugyanez benne van. De egyebkent ugyanezt a problemat egy a motorral parhuzamos kondi is javitja. Az LC szurot nagyjabol ugy szamolnam ki, hogy mondjuk 20dB-t vagjon a PWM frekvencian. 100uH, 10uF.. -3dB - 5 kHz, kb. -40dB - 50kHz. A motor amugy sem biztos, hogy komalja a 64 kHz-es jelet.
64kHz-et nem kellene hallanod. Ha mégis van hangja, akkor azt nem a vivő, hanem valami más okozza. Lehet érdemes lenne a valódi okot megkereni, mert 20kHz fölött már nem szabad, hogy hangja legyen.
Ha utána nézel, az L293D az ST adatlapjában maximum 5kHz-re van ajánlva. Belül bipoláris tranzisztorokból van felépítve a híd, nem tulságosan fürge. Már egy soros fojtótekercstől lényegesen javulni kellene a helyzetnek, kérdés mennyi hely áll rendelkezésre. A motor az áram hullámosságtól zümmög, ha a hullámosságot lecsökkented fojtóval, akkor a hangja is kisebb lesz. A méretezéshez kellene tudni a vivő frekit (?4kHz?), a maximális áramot, és a H híd feszültségét. H híd kimenetére nem illik direktbe kondenzátort tenni, tönkre mehetnek a kapcsoló félvezetők.
Hát igen épp ezaz, foggalmam nincs, miért hallom még 64kHz-nél is a zümmögést.
Egy adafruit motorshield-et(v1) használok ami 4-36V között működik és 0.6A folyamatos áramfelvétellel bír motoronként. Hely akad bőven, a vasúton az összes mozdony 12V-s motorokkal van ellátva amik, idáig egy Piko fz-1-ről kapták az áramot, ez 1A-t tud, de maxra sose volt feltekerve, így hát a 0,6A belefér a keretekbe. Rendben, akkor kiveszem, köszönöm az info-t!!
Kilohertzes tartományokat felejtsd el! ( ahhoz már ki kellene venni a mozdonyokbol a fojtotekercseket). A zümmögést más is okozhatja. Nem régen az egyik itteni kolléga szenvedett hasonloval, aztán kiderült, hogy a zümmögés nem a PWM-töl származott, hanem a PWM rossz kezelésétöl az AVR-ben ( valamelyik a timerek közül megszaggatta a PWM jelet egy alacsonyabb frekivel). Egy szkop segitene.
Azok a régi motorok kb. 150-200Hzes PWM-mel mennek jol. A hozzászólás módosítva: Aug 3, 2015
Hát én szívesen elfelejteném, de az arduval max. 1kHz-ig lehet lemenni. :/
Akkor rossz lóra tettél. ( sajnos az Arduinot nem ismerem annyira részletesen).
Minden bizonnyal lehet benne szoftveres PWM-et használni, az kb. olyan frekvenciájú, amilyet akarsz, csak megfelelő példát kell találni. Nem ismerem az Arduino-t. Nyelő dióda az, amit te lendítő diódának nevezel.
Most már van két topik ugyanarra a témára, ez meg a DC motorvezérlés ( egybeirva).

1-2kHz-cel biztosan működni kell a dolognak, az Arduino hardveres pwm-je pedig jó erre a feladatra szerintem.
Nem írtad meg, hogy te mekkora feszültséggel táplálod a H hidakat. Ha 12V-tal táplálod, akkor 1mH nagyságrendű induktivitással tudod 100mA alatt tartani az áramhullámosságot 2kHz-es vivő mellett. Nem tudom milyen vasmagok állnak rendelkezésedre. Ha van PC tápból kibontott sárga toroidot, elsőre azzal is megpróbálhatod, de több száz menetet kellene rátekerni. A PC táp főtrafója vagy más ETD vas csévetesttel könnyebben megtekerhető, de abba légrést is kell tenni. Ha megírod a lehetőségeket, akkor próbálok segíteni. Persze vehetsz is ilyen kész induktivitást is.
Bigup Peter65 !!
Szóval szerinted működne mindkét irányba, ha sorba kötnék egy tekercset? Holnap bontok ki, van itthon elfekvőben 6 PC táp és küldök képet, hogy miket bontottam. 12V-ról szeretném táplálni a hidakat és 1A fölé semmiképp sem akarok menni, a tesztkörökön szépen mentek a vonatok 600mA-el 12V mellett, csak az idegesítő kínlódó zümmögés volt, pláne akkor amikor indul a vonat, mert ráadásul a motor alapból terhelés alatt van és úgy kell elindulnia.
Itt alapvetö keveredés van. Ha valodi PWM-t akarsz, akkor a motort ki/be kell kapcsolni egy bizonyos frekivel ( ahogy irtam azok a motorok <500Hz-t igényelnek). Ilyenkor nem tehetsz sorba semilyen tekercset stb. ami kiszüri az impulzust ( neked az kell, hogy jol menjen a motor).
Más applikácioban a PWM-t veszteségmentes energiaátvitelre használjuk ( ilyenkor az impulzusoknak nincs extra szerepe csak a kitöltési tényezöböl adodo energia kerül majdnem egyenáram formában a motorra). Ilyenkor kell a magas freki meg egyébb szürök amik kiszürik az impulzusokat és a "maradék" majdnem egyenáram kerül a motorra. A modellmotorok hajtására ez majdnem alkalmatlan. A hozzászólás módosítva: Aug 3, 2015
Probáld meg a sziftwares PWM-t. Nekem AVR-en gond nélkül megy igen nagy frekvencia tartományban.
Az egyenáramú motorokkal ipari viszonyok között is sokszor kötne sorba simító fojtó tekercset. Különösen akkor van rá szükség, ha a motor még a régi Ward-Leonard rendszerű hajtásokhoz készült (a megengedett áramhullámosság 5-10%), de tirisztoros áramirányítóval akarjuk táplálni. A soros fojtó veszi magára a hullámos feszültséget, és simítja az áramot.
Működni biztosan működni fog a motorod mind a kettő irányba, az áramot is simítani fogja. Persze nem csodaszer, és ha a pwm jellel van probléma, akkor ez sem fogja azt megoldani. A hozzászólás módosítva: Aug 3, 2015
Szerintem minden pwm-mel a minél jobb hatásfokú energiaátvitel a célunk, függetlenül attól, hogy mi a fogyasztó.
Miért ne menne jól egy DC motor, ha egy soros induktivitás magára veszi a hullámos feszültséget? Sőt, inkább kedvező a motor számára, mert az áram hullámosságát mérsékli, ami nem csak a disszipációs veszteségek szempontjából hasznos, hanem a kommutációt is segíti (a motor semleges vonalának kisebb lesz az ingadozása). Egy modellmotor szerintem nem különbözik ezekben a vonatkozásokban. A pwm vivő kiválasztását szerintem nem a terhelés határozza meg elsősorban. Az aszinkron motorokat tápláló frekvenciaváltók vivője is kHz nagyságrendű, és nem a motorok miatt nem viszik feljebb, hanem a kapcsolási veszteségek mérséklése miatt.
Félreértetted a feladatot. A nagy motoroknál egész más a feladat mint a modellmotoroknál, ahol a kefeveszteség nem elhanyagolhato a kapocsfeszültséghez képest ( 2-3 V verzus 12 V).
A nagy motoroknál marad a kefeveszteség, de a feszültség nem és ott nem számit, hogy 3V-rol indul vagy sem. Ezért a kis motiroknál a PWM impulzusai elsösorban a kefeveszteséget hivatottak eliminálni mig a nagy motoron erre semmi szükség nincs. Ezért a kis motoron nem szabad kiszürni az impulzust, a nagy motoron meg kötelezö.
Itt az alapvetö tévedés.
A kis motorokon, ahogy már elöbb irtam, 2-3 V veszik el a keféken. Azaz 2-3 V alatt el sem indulnak. Ezen felül a surlodások is nagyságrenddel nagyobbak, mint egy nagy motoron, erre elmegy további néhány tized - 1 V. Ez az a holt tartomány, amikor a kis motor csak meddön áll pedig ott van rajta a feszültség. Ebböl következik, hogy egy 12V-s motor gyakorlatilag csupán a 4-12V tartományban szabályozhato sima egyenárammal. Ez mindössze 12/4=3 a szabályozási tartomány. Ezért ugranak a kis motorok amikor folyamatosan növeled a feszültséget. Ha nagyobb tartományban akarod öket vezérelni ( márpedig ez a cél), akkor le kell küzdeni ama meddö veszteséget. Erre vannak kellenek az impulzusok. Az igazi profi megoldás az, amikor a sima DC-hez kevernek megfelelö feszültségü és szélességü tü impulzusokat ( kb. addig amig a DC el nem éri a motor alapveszteségeit (3-4V). Azután már nem kellenek. Ez lenne az optimális minden mini motorra. Sajnos bonyolult a kivitelezése és minden motorhoz más beállitás kell. Ezért született meg a PWM hajtás, ami állandoan impulzusokat küld a motorra és gyözi le az alapveszteséget. A hibája viszont az, hogy hosszadalmas középtartományban könnyen a motor névleges teljesitménye fölé kerülsz a PWM jelekkel és teszed tönkre a kis motort. Gyakorkatilag pl. egy impulzusokkal ellátott DC vezérléssel egy kis motor akár 0,5V-ról indulhat és gyönyörü simán fut 12V-ig ( 12/0,5=24-szerese a minimális sebességnek). A gyári trafok jo ha 5-12V tartományban tudják mozgatni a modelleket. A hozzászólás módosítva: Aug 3, 2015
Utána olvastam amit írtál. Ami kép bennem összeállt az a következő:
Modellvasutaknál különösen probléma a motorok indulása; 12V-os motorok van hogy meg sem mozdulnak 4V-ig, utána aztán meg megugranak. Ha viszonylag alacsony frekvenciás (az általad írt 100Hz körüli érték) pwm-mel vezéreljük a motort, akkor könnyebben elindul a motor, mert a durva áramimpulzusok, segítik az átmeneti ellenállások (beleértve a keféknél lévő átmeneti ellenállást is, amit írtál) és súrlódási problémák leküzdését. Ha a vonat elindult már, akkor viszont a sima DC áram lenne a legkedvezőbb. Elvileg lehetne keverni a kétféle vezérlést a magasabb vivőn; induláskor több 100%-os és 0% periódussal, és akkor a fojtó tekercs simító hatása nem tud érvényesülni. Odissey majd eldönti melyik irányba megy tovább. Végül is neki nem indulási, hanem akusztikai problémái vannak. A hozzászólás módosítva: Aug 4, 2015
|
Bejelentkezés
Hirdetés |