Fórum témák
» Több friss téma |
Fórum » Robotika kezdőknek
Csak az a baj hogy Ő réges-régen élt egy messzi-messzi galaxisban.
ifjuhorgasz: Egyébként C-3PO-nak van két lába, amivel lépked. Ezt kicsit nehéz lesz billentyűkkel irányítani úgy, hogy el ne dőljön. Próbáld inkább R2-D2-t. Neki kerekei vannak.
Anakin jó haverom, nekem elküldte a kapcsrajzát, meg egy két főbb alkatrészét.
Szia R2-D2 kinézett+ ezBővebben: Link.

Én nem ilyen kis dologgal kezdeném az épitést Elsöbb egy birodalmi lépegetö aztán egy csillag romboló val
  Félretéve a vicce lödést erröl a japánok tudnának neked mesélni akik ASIMOt fejleszteték ki közel 10-15év kellet amire ö kész lett a legtöbb fejlesztést a két lábon lévö járás tökéletesitése volt amire ilyen lett!!! ASIMO robot
Helo!
Én még csak most vagyok 9.-es. És most kezdtem el csak tanulni, az iylen témákat. Persze, és szeretnék ezalatt a a négy év alatt tervezni egy egyedi robotot, és programozni. ÉS, ehhez leírást tudnátok adni? Nem tudok tökéletesen angolul, úgyhogy, ha lehet magyarul, ha lehet. És egy könyvféleség legyen, mert magam szeretném megtanulni a nulláról a programozást, meg mindent, ami kell egy iylen robot megépítéséhez. Meg, hát meg is szeretnék tanulni.
szia
"Persze, és szeretnék ezalatt a a négy év alatt tervezni egy egyedi robotot, és programozni. ÉS, ehhez leírást tudnátok adni?" Pontosabban mihez kell leírás? a robot megtervezéséhez, vagy a programozáshoz? a robotod teljesen magad akarod összerakni, vagy meglévő, kereskedelmi forgalomban kapható hardware-eket akarsz használni hozzá? kerekeken, lábakon, légpárnán mozogjon? tudjon mozogni? kisméretű, nagyméretű? milyen funkciókat lásson el? villogjon, forogjon - vagy vigye ki a szemeteskukát? minden azon múlik, hogy Te mit szeretnél! Arra nincs könyv, leírás, videó, hogy Te mit szeretnél... A programozás már más kérdés: Itt csak az a kérdés, hogy mit szeretnél programozni... Ha egy microvezérlőt szánsz a robot agyának, akkor olyan programozási nyelvet kell választanod, amit használni tudsz hozzá. (Atmel-ekhez C, ASM, Bascom; PIC-ekhez C, Assembly) Ha pedig Számítógép felöl szeretnéd vezérelni, akkor meg rengeteg nyelvet választhatsz. (C, C++, C#, pascal, delphi, asm, java, és még sorolhatnám...) Vannak kifejezetten könyvek, magyarul is. Bár ha menne az angol, akkor rengeteg információt szerezhetsz. (gondolom tanulsz idegen nyelve(ke)t, így idővel már ez sem lesz gond.) Szóval az első a koncepció megalkotása, utána a tervezés, majd az elkészítés. Véleményem szerint amíg nincs semmi koncepciód, nehezen tudnánk szakirodalommal segíteni... Ha nem volna ötletem, én első körben keresgélnék a neten robotokat, és ötletet merítenék mások "alkotásaiból". Ebben pedig a legjobb barátom a google lenne...  Bővebben: Link Bővebben: Link
Helo!
Köszi, a segítséget. A Google keresgéltem, és ezt az oldalt adta ki. ÉS, azért írok ide. Nem teljesen robotot szeretnék. Illetve azt is. Hanem, ha sikerül a középiskola, meg aztán az egyetem is  , akkor majd szeretnék 4 másik barátommal egy boltot nyitni, vagy egy nagy céghez elmenni, (remélem sikerül majd) és szeretnénk egyedi telefont, TV-t vagy ilyesmit készíteni, meg, hát legfontosabban robotot tervezni. Tehát, ilyen elektronikai dolgokat szeretnénk majd tervezni. És, ehhez kéne leírás, Mind programozás, mind ilyen elektronikai téren. ÉS, ezeket szeretnénk 5 részre felosztani, hogy egyikünk programoz, másikunk tervez telefont, másik Például Tv-t, robotot, meg ilyesmi. Tudom, nagy előre gondolkodás, és valószínűleg, nem is fog sikerülni, de, azért meglehet próbálni. Így van esélyünk, mintha nem csinálnánk semmit. Igen tanulok idegen nyelvet, de ahogy olvastam, nem igazán értem még a külföldi cikkeket, meg ilyesmit. Úgyhogy ha lehet magyar leírások legyenek. Vagy, ha van könyv, akkor az. Gondolom ez, így nincs meg, de, 5-en vagyunk, tehát, mindenki valamit felvállal. És, nagyon jó lenne, ha te vagy valaki más tudna segíteni. És légy szíves ne röhögjetek ki. Ezt tényleg megszeretnénk csinálni. Azt hiszem, egyelőre ennyi, ha valamit kifelejtettem volna, akkor írd le. Remélem értitek mit szeretnék/szeretnénk. , akkor majd szeretnék 4 másik barátommal egy boltot nyitni, vagy egy nagy céghez elmenni, (remélem sikerül majd) és szeretnénk egyedi telefont, TV-t vagy ilyesmit készíteni, meg, hát legfontosabban robotot tervezni. Tehát, ilyen elektronikai dolgokat szeretnénk majd tervezni. És, ehhez kéne leírás, Mind programozás, mind ilyen elektronikai téren. ÉS, ezeket szeretnénk 5 részre felosztani, hogy egyikünk programoz, másikunk tervez telefont, másik Például Tv-t, robotot, meg ilyesmi. Tudom, nagy előre gondolkodás, és valószínűleg, nem is fog sikerülni, de, azért meglehet próbálni. Így van esélyünk, mintha nem csinálnánk semmit. Igen tanulok idegen nyelvet, de ahogy olvastam, nem igazán értem még a külföldi cikkeket, meg ilyesmit. Úgyhogy ha lehet magyar leírások legyenek. Vagy, ha van könyv, akkor az. Gondolom ez, így nincs meg, de, 5-en vagyunk, tehát, mindenki valamit felvállal. És, nagyon jó lenne, ha te vagy valaki más tudna segíteni. És légy szíves ne röhögjetek ki. Ezt tényleg megszeretnénk csinálni. Azt hiszem, egyelőre ennyi, ha valamit kifelejtettem volna, akkor írd le. Remélem értitek mit szeretnék/szeretnénk.
Lenézni, kinevetni, itt nem fognak.
Nem tudom, hova jársz most. A probléma felbomlik több részre: mechanikai (a robot fém váza, karjai, stb), energetikára (motorok, hengerek, energiaforrás, és kapcsolgatása, erősáramú(>100mA) rész) és marad a vezérlés. A vezérlésre mikrokontroller a legmegfelelőbb. Ezt meg kell tanulni programozni. Mivel, magyar nyelven szeretnél olvasni róla, a PICeket tudom ajánlani. A mechanikát nektek kell kitalálni, ha megvan, mit kell, hogy végezzen a robot (egy ipari robotkar, "emberszabású" lépegetőrobot, autó, stb), akkor ez alapján megvalósítani. Egy valaki másszon bele a gépészet rejtelmeibe. A motorokat elég egyszerű beszerezni. De a vezérlésük különféle. Valaki, tanulja, meg az elektronikát, alapvető számolások, egyszerűbb áramkörök, majd a motorok vezérlése, szabályzása, egy másik szükséges téma az akkutöltők. Főleg, ha li-ion cellákat vesztek, akkor muszáj hozzá, szabályos töltőt készíteni, különben robbanhat. (ha hétköznapi akkukat használtok, kicsi rá az esély, de a rendes modellakkuknak, nincs semmi beépített védelme). A vezérlésre, pedig írtam a PICet, ezt legalább két ember csinálja, nem ártana, asemblerben kezdeni. Majd később Cben. Ez az én javaslatom, persze, ha már ismertek egy programnyelvet, akkor inkább ahhoz keresetek fordítóprogramot. Mindenképpen kell egy égetőáramkör. Egyszerűbbet, házilag nagy sikerrel össze lehet rakni. De csak olyat nézzetek, melynek kell külső táp. A programozásra régebbi, vagy drágább asztali gép használható, melynek még van soros és/vagy párhuzamos csatlakozója. Valaki meg kell, hogy tanulja a NYÁKok elkészítésének fortéját is. Tehát van feladat. A cél dicséretes. Valami hasonló lebeg előttem is, csak a csapatmunka kizárt. Számítógépről irányított félautómata, kocsi szerűség. A tudásom jelenleg a mikrokontrollerek programozásából hiányos. Nagyon hiányos. Írtam már programot, olyat is ami működik is, és szenvedtem már vele nem keveset. Ezért ajánlom, ezt a rész legalább két ember csinálja egyben, egyedül nagyon hamar kidől az ember. Ha még nincs semmi elképzelésetek, minden témának járjatok utána, és egy kis ipari robotkart, próbáljatok meg elkészíteni. Sokat lehet vele tanulni, ha sikerült, utána, már lehet, a programozást tovább fejleszteni, gombnyomásra, pakoljon át valamit, megadott Aból Bbe. Még tovább haladva, sorba szedje a dolgokat, egyik helyről és sorba rakja a másik helyre. Ha már jól mén, esetleg közben lehet áttérni nagyobb mechanikára is (~30cmes karrészekre), erőseb motorokkal, komolyabb szabályzókkal. Így mind lassan fejlődtök.
Sziasztok. Nem tudná nekem valaki elmondani, hogy egy robotot egyszerűen hogy kell megcsinálni amihez (nem kell sok cucc), mert olyat csinálnék ami nem kereken gurul. Valami ilyesmire gondolok. A link:http://www.youtube.com/watch?v=i7xviXVuBXY&feature=fvw
Nem itt a HE-n kell gyakorolni a szmájlik sorrendbe rakását! És légy szíves, mellőzd a túl sok rövidítést, nem MSN vagyunk, sem nem chat! - Norberto
A mobilrobotok legyenek:
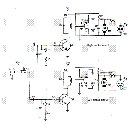
1.Ember által készített szerkezetek, 2.mozogni tudjanak, a mozgásban több szabadságfokkal rendelkezzenek, 3.tevékenységüket részben, vagy teljesen önállóan irányítsák. 4.Tartsák be a robotika alaptörvényeit (Nem bánt élőlényt / Követi az ember parancsát (amíg nem ütközik 1.) / Megvédi magát (amíg nem ütközik 1., vagy 2.)) Tehát a linkelt dolog nem robot. A mellékelt képen lévő kapcsolás azt csinálja, hogy ha nekimegy valaminek a robot, hátrál egy kicsit, elfordul, és továbbmegy. R1 és R5 aránya állítja, hogy merre fog kanyarodni hátrálás közben. Kezdetnek jó, határ a csillagos ég!
Sziasztok!
Én nemrég építettem meg VILL-I -t (Vili-t). Ez egy ATmega8-as mikrokontrolleren alapuló egyszerű kis robot. Én is még csak most kezdtem el ismerkedni a robotikával és a mikrovezérlőkkel, ezért gondoltam másokat is érdekelne, ha írnék egy teljesen kezdőknek szóló cikket az építés során szerzett tapasztalataimról. Remélem 1-2 héten belül be tudom fejezni, és olvasható lesz itt a HE-n. Üdv: Fizikus
Látom, te is a Sharp távolságmérőjét használod. Én is ilyet fogok beépíteni, a 10-80cm méréstartományút.
Te honnan szerezted be? Én csak Conradban találtam, és ott nevetségesen drága.
Még nem használok, csak használni fogok. (amint lesz időm rájönni hogyan működik az ADC)
Azt hiszem hogy pont egy Sharp GP2Y0A21YK van a képen (10-80 cm hatótáv). Ha jól emlékszem 16.95AU$ volt. Ha nagyon kell, de nem sürgős és ráér Márciusig keress meg privátbaban. Üdv: Fizikus
A SHARP oldalán megnéztem ezt az érzékelőt, és mintha már nem gyártanák (discontinued).
Valaki nagy vonalakban el tudná magyarázni, hogy hogyan működik ez a fajta infrás távolságérzékelő? Néztem az adatlapját, és mintha modulált jellel meghajtott infraLED visszavert jelének késleltetését mérnék, de szerintem ez 80 cm távolságra mérhetetlen kis időt eredményez tekintve a fénysebesség 3*10^8 m/s értékét.
Sziasztok!
Először is gratulálok a cikkhez! Másik problémám, hogy kislányom mindenképpen robotépítő játékot szeretne karácsonyra! Namost 4 évesen a Lego Mindstrorm vagy mi kicsit erős lenne amit találtam az meg drága. Tud valaki a kettő között valami olyan építő játékot amiből lehet robotot építeni és nem túl bonyolult? Én ezt utána kiegészíteném elektronikával természetesen.
PSD=phase sensitive detector a wiki szerint.
Interferenciát mérnek az optikai távolságmérők, inkább hangnál működik a hangkiadás és visszaverődés közti idő mérése (TOF=time of flight). Viszont ott is pontosabb a fáziseltolásos módszer. Konkétan erről a szenzorról olvastam olyat is, hogy egy sima CCD van benne, és azt dolgozza fel, hogy annak melyik részére verődik vissza a fény. Ezt nehezebben tudom elképzelni, az oldal sem volt túl "megbízható". A lényeg, hogy a kiadott és visszaverődött fénysugár fáziskülönbségéből számítható a távolság. Elvileg a képlet: D=fényforrás_és_érzékelő_közti_táv+hullámhossz*(fáziskülönbség/2*pi) Holnapi zh anyaga...
Köszi a választ, de nem lettem sokkal okosabb.
Akkor ez most digitális vagy analóg fáziskülönbség mérés? Mert azt a nanosecundum tartományú különbséget továbbra sem értem, hogy lehet mérni olcsóbb elektronikus eszközzel.
Fáziseltolásos élességállítás lehet az alapja. Keres rá a netten, pár pixeles érzékelővel dolgozik. Még mindig a leggyorsabb élességállítási módszer. Egyszer kell hitelesíteni, és elég pontos távolságmérőt lehet csinálni.
Fizikus!
Szeretnék én is gratulálni a cikkedhez, nagyon igényes lett! Egyetlen észrevételem lenne, hogy a .h állományt ún. fejléc állománynak hívják, és nem "illik" bele forráskódot írni! Ez arra jó, hogy az általad használt konstansokat, és függvény _fejléceket_ definiáld benne, ezáltal a fordító majd tudni fogja, hogy léteznek ilyenek. Maga a kód külön .c fájlba kerüljön, amit hozzáfodítasz a főprogramhoz. Persze így is működik, de a fentebbi módszer elegánsabb. Főleg, hogy erre találták ki. A PWM-et nagyon szabatosan sikerült leírni, ezzel eddig mindig gondom volt. Az adatlapból fordítottad? Nagyon szép leírás lett! Krisz
Sargarigo, koszonom a fejlec fajlokkal kapcsolatos eszrevetelt. Mivel csak most ismerkedem az elektronikaval, nekem az volt a fontos hogy mukodott, es a foprogram igy eleg egyszeru lett. (a MicroCamp-MEGA8 V2.0 kezikonyvben is hasonloan kodoltak, azt hasznaltam mintakent)
A PWM-rol (a Timerek hasznalatarol) is kulon cikksorozatot lehetne irni, itt is csak az volt a fontos hogy egy egyszerubb PWM mod hasznalataval sikerult vezerelni a robotot. Sokat kell meg tanulnom a Timerek hasznalatarol. Tobbfele Sharp IR szenzor is letezik kulonbozo merestartomannyal. A Sharp GP2D120 merestartomanya ha jol emlekszem: 4-30cm, a Sharp GP2Y0A21YK merestartomanya 10-80cm. A szenzor haromszogeleses modszerrel mukodik. Az erzekelo egy optikaval lekepezi a kibocsatott IR nyalab targyakrol visszavert kepet, es attol fuggoen hogy milyen szogben erkezik vissza a visszavert feny, mas-mas CCD pixelre vetitodik. Ebbol mar meghatarozhato a tavolsag. A szenzor egyebkent egy a tavolsagtol fuggo nemlinearis analog feszultsegjelet allit elo (50 dollaros robot weboldala). (Sharp IR tavolsgerzekelo) Az alabbi kepet pedig a MicroCamp-MEGA8 V2.0 kezikonyv-bol olloztam ossze. Nem veletlenul raktam a cikkem vegere a hivatkozasokat, olvassatok el, mert hasznos! Udv: Fizikus
Esetleg mast is erdekel:
A Sharp IR tavolsagerzekelo szenzor a Conrad-nal nagyon draga, de az alabbi weboldalon kb 15-20 Euro. Irjatok be a keresobe: SHARP proximity farnell magyarorszag Vigyazat van analog es digitalis kimenetu szenzor! Az analog a tavolsaggal aranyos analog kimeneti jelet ad,a digitalis viszont egy fix tavolsagnal valt logikai 1-rol 0-ra. Udv: Gabor
Én is be vagyok oltva kisrobot ügyben. Ha valaki tudna segíteni magyar nyelvű anyagal gyroscope IC ügyben, akkor kérem segítsen. A Googl-t már több soron átnyálaztam. Lehet hogy valami elkerülte a figyelmem?
Arra lennék konkrétan kíváncsi hogyan működnek ezek az IC-k? Miféle adatforgalom megy végbe egy ilyen vezérlő rendszerben? Biztosan sokan lehetünk akiket érdekelhet a téma, előre is köszönöm.
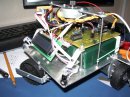
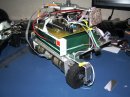
Hogy el ne tűnjön ez a topic, feldobom pár képpel. Egy ideje belekezdtem én is egy saját robot építésébe, mert mindenkinek KELL, hogy legyen egy saját robotja.
A programozós dolgok lassabban haladnak, még nem mindent kezel. PWM, LCD-re írkálás, a léptetőmotor forgatása nem akadály, csak ezekből egy rendszert gyúrni szép meló. Holnap élesztem az infrás akadályérzékelőket (TSOP4840). Kíváncsi leszek mit fognak művelni, mert magas jelszint gyanánt 3,5V-t adnak, remélem a pic (most 16f877a, valószínűleg változni fog) beéri ennyivel... A tetején a léptetőmotor a sokat emlegetett Sharp távszenzort fogja forgatni, az lesz a tájékozódás alapja. Odometria számításhoz 2 mechanikus rotary encodert raktam be, az optokapus megbízhatatlan volt (minden fény zavarta). Ez sem végleges megoldás. Hardveresen ez is adja a jelet, de mivel programozni sose tanítottak, képtelen voltam eddig normálisan feldolgozni... Az akksi pedig azért ekkora, mert egyrészt az ismerőstől kapott motorok gigantikus teljesítményűek, másrészt ez így kb fele annyiba kerül, mint ceruza-akksikból kirakni 9- 12V-t. Az össztömeg lett vagy 3 kiló. Lesz akku feszültségszint figyelés, töltő megtalálása, vonalkövetés, másik robot követése, -terv az van bőven. Ő egy amolyan nyák kellős közepébe bedrótozós tanulórobot, kész állapota sosem lesz (esetleg majd ha a bejárt utat bluetoothon beküldi gépre, az pedig ábrázolja  ) )
Nagyon tetszik a robotod Szkrep!
Remélem egyszer Én is eljutok odáig hogy nekiálljak egy ilyen összetett robot építésének. Most éppen az ADC-vel hadakozom, sehogy sem akarja a 2 db fotoellenállással felszerelt robotom követni a padlóra vetített fénykört. De előbb-utóbb muszály lesz neki! |
Bejelentkezés
Hirdetés |